De vormen van de Ruimtelimiet / Zone worden als volgt ingesteld:
Item
Omschrijving
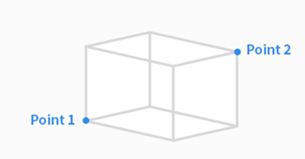
Cuboid
De vorm van de Ruimtelimiet / Zone wordt ingesteld als een kubus
Voer het laagste eindpunt (Punt 1) en hoogste eindpunt (Punt 2) van het blok in en tik op de knop Pose opslaan.
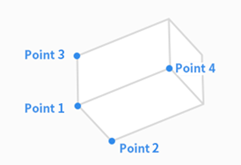
Tilted Cuboid
De vorm van de Ruimtelimiet / Zone wordt ingesteld als een schuine kubus.
Voer het referentiepunt (Punt 1), eindpunt van de x-as (Punt 2), eindpunt van de y-as (Punt 3) en eindpunt van de z-as (Punt 4) in van het gekanteld blok en tik op de knop Pose opslaan.
De drie lijnen (Punt 1-Punt 2, Punt 1-Punt 3, Punt 1-Punt 4) moeten elkaar op rechte hoeken kruisen. (een afwijking van +/- 5 graden is acceptabel)
Gebruik van de beperkende beweging 'Oppervlak vergrendelen' en 'As vergrendelen' op basis van punt 1, helpen de robot de punten 2, 3 en 4 eenvoudiger te verkrijgen.
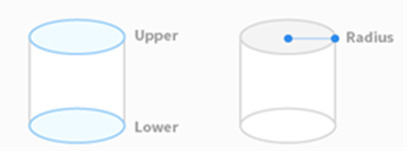
Cylinder
De vorm van de Ruimtelimiet / Zone wordt ingesteld als een cilinder.
Voer het punt op een radiusafstand, punt van het bovenste vlak en punt van het onderste vlak van de cilinder in en tik op de knop Pose opslaan.
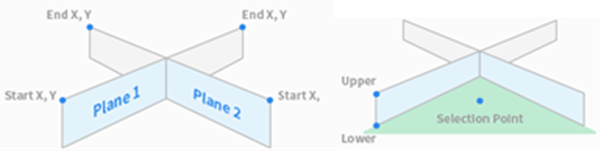
Multi-plane Box
De vorm van de Ruimtelimiet / Zone wordt ingesteld als een doos met meerdere vlakken.
Stel de hoogte van de boven- en onderkant van de doos met meerdere vlakken in en druk op de knop Pose toevoegen om een vlak toe te voegen.
Selecteer X- en Y-coördinaten om de richting van het vlak in te stellen en tik op de knop Pose opslaan. U kunt maximaal zes vlakken configureren.
Stel de coördinaten in voor de punten van het te configureren gebied.
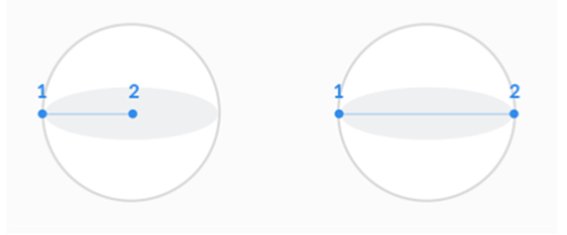
Sphere
De vorm van de Ruimtelimiet / Zone wordt ingesteld als een bol.
Om de radius te configureren, voert u de posities van het middelpunt en eindpunt van de bol in, en om de diameter te configureren, voert u de twee eindpunten van de bol in. Tik vervolgens op de knop Pose opslaan.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.