
Robotinstelling - Wereldcoördinaten instellen
OPTIONEEL NORMAAL 3 MIN.
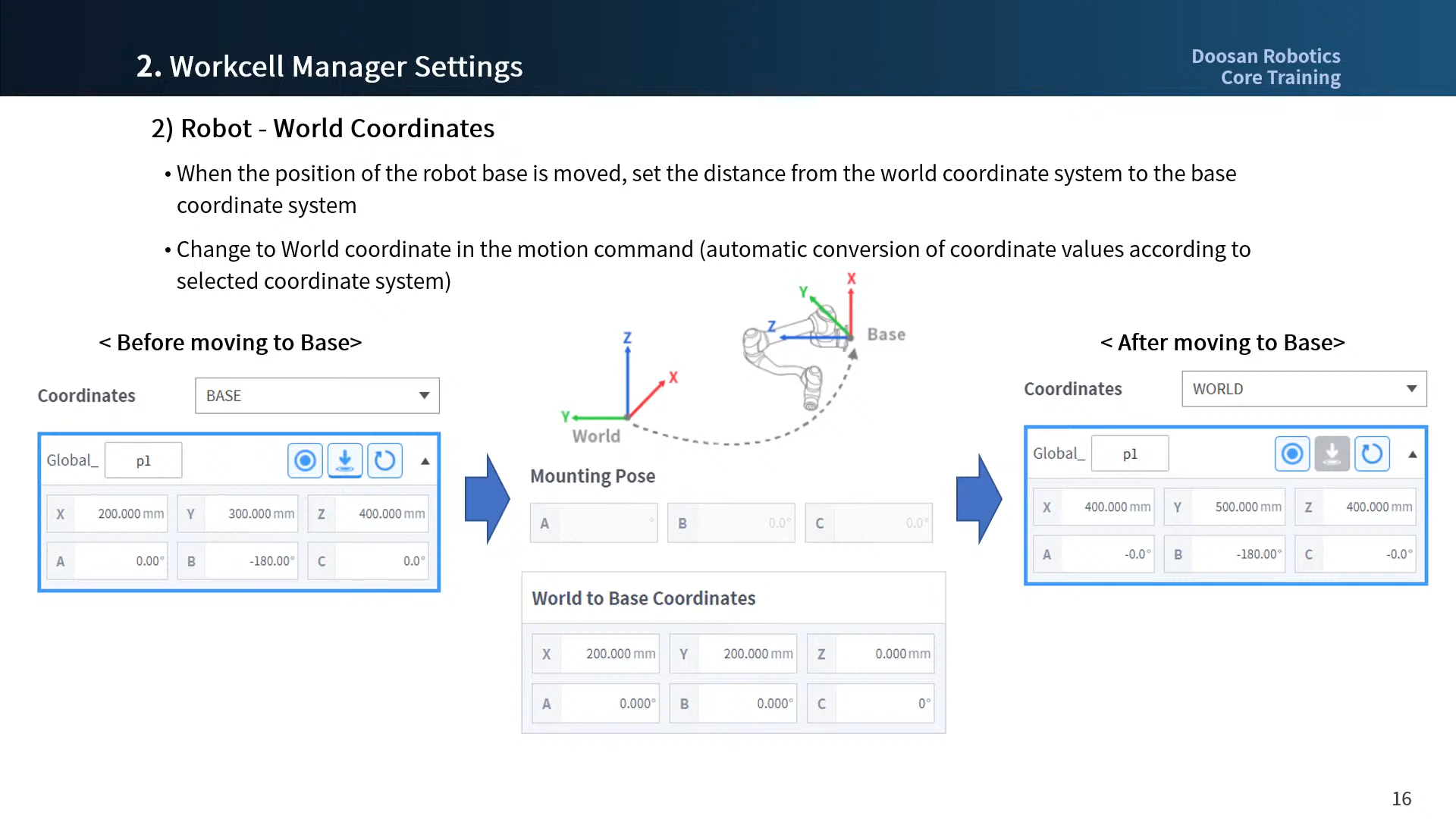
De wereldcoördinaten van de robot kunnen worden ingesteld vanuit World Coordinates. Als de robotcoördinaat de basiscoördinaten is, kan deze stap worden overgeslagen.
Wereldcoördinaten kunnen worden ingesteld via workcell Manager > Robot > World Coordinates. Raadpleeg Set World Coordinates voor meer informatie Wereldcoördinaten instellen.
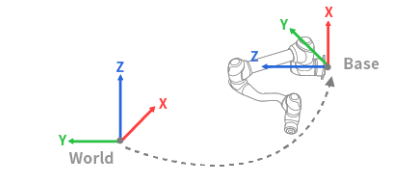
- Wereldcoördinaten worden gebruikt wanneer de locatie van de robotbasisinstallatie fysiek wordt verplaatst/geroteerd.
- Het wijzigen van de wereldcoördinaten zal dezelfde beweging/rotatie toepassen op het scherm van de robotsimulator.
Opmerking
Wereldcoördinaten kunnen ook worden gebruikt nadat de basislocatie en -hoek zijn veranderd na robotonderwijs. Als de coördinaten van taken die in het verleden door robotonderwijs zijn gecreëerd van BASIS naar WERELD worden veranderd, wordt een compensatie die overeenkomt met de beweging/rotatie van wereldcoördinaten toegepast op alle bewegingscoördinaten.