Probeer commando-samples forceren
OPTIONEEL NORMAAL 20 MIN.

Dit voorbeeld wordt gemaakt in de Task Writer. Dit voorbeeld kan op vrijwel dezelfde manier worden geprobeerd in de Task Builder.
Let op.
- Lees en volg voordat u het monster probeert Voorzorgsmaatregelen voor gebruik. Zie voor meer informatie DEEL 1. Veiligheidshandleiding.
- Voor dit voorbeeld moet het bestand Task Writer worden gemaakt in Probeer voorbeelden van complianceopdrachten.
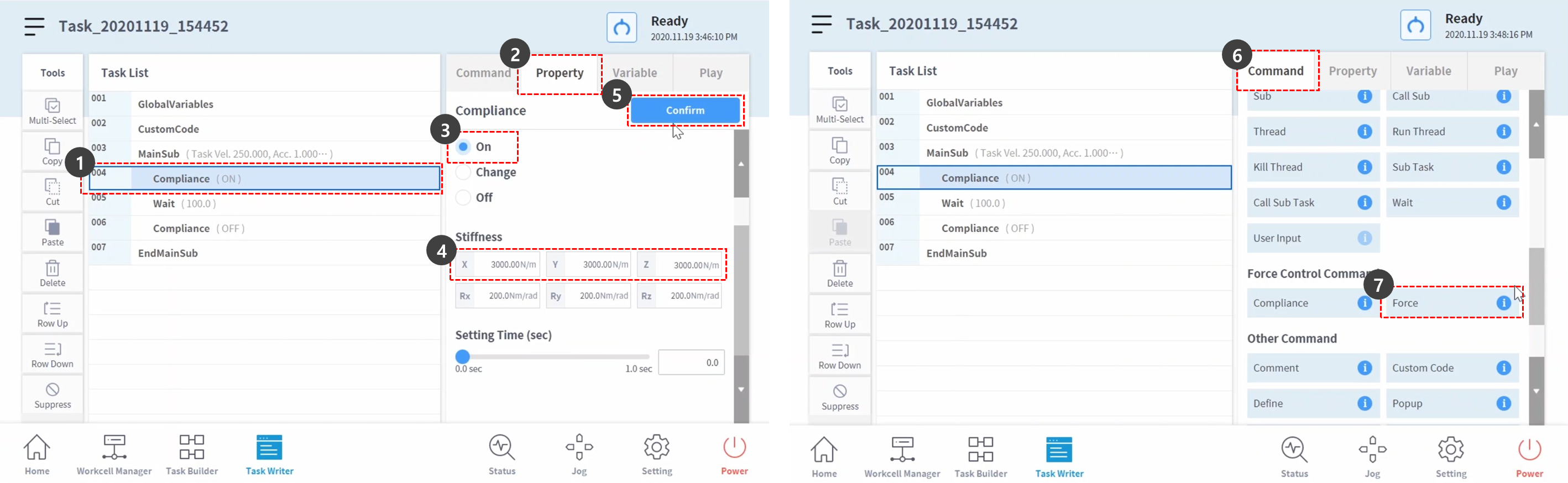
- Probeer voorbeelden van complianceopdrachten Open het gemaakte Task Writer-bestand en selecteer de complianceopdracht op de vierde regel van de takenlijst.
- Selecteer het tabblad eigenschap.
- Stel de modus als volgt in: Modus aan maakt compliancebeheer mogelijk. De opdracht forceren is alleen beschikbaar als compliancebeheer is ingeschakeld.
- Modus: Aan
- Stel de standaardwaarde voor stijfheid als volgt in:
- X, Y, Z: 3000 N/m (standaard)
- RX, Ry, RZ: 200 Nm/rad (standaard)
- Druk op de bevestigingstoets.
- Selecteer het tabblad opdracht.
- Voeg een opdracht forceren toe. Deze opdracht is gepland om te worden gebruikt voor het inschakelen van de geforceerde controle.
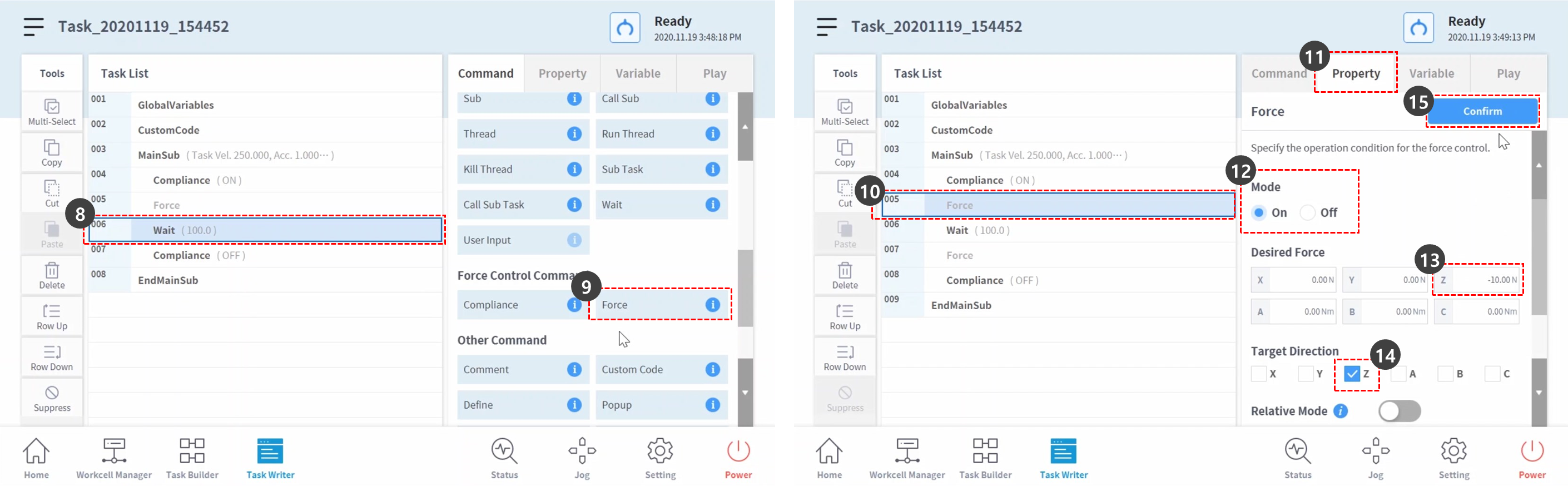
- Selecteer de zesde regel van de takenlijst.
- Voeg een opdracht forceren toe. Deze opdracht is gepland om te worden gebruikt voor het uitschakelen van forceer control.
- Selecteer de opdracht forceren op de vijfde regel van de takenlijst.
- Selecteer het tabblad eigenschap.
- Stel de modus als volgt in: Modus aan schakelt Force Control in.
- Modus: Aan
- Stel de gewenste kracht als volgt in:
- X: 0 N (standaard)
- Y: 0 N (standaard)
- Z: -10 N
- RX, Ry, RZ: 200 Nm/rad (standaard)
- Controleer alleen de Z-as in de doelrichting.
- Druk op de bevestigingstoets.
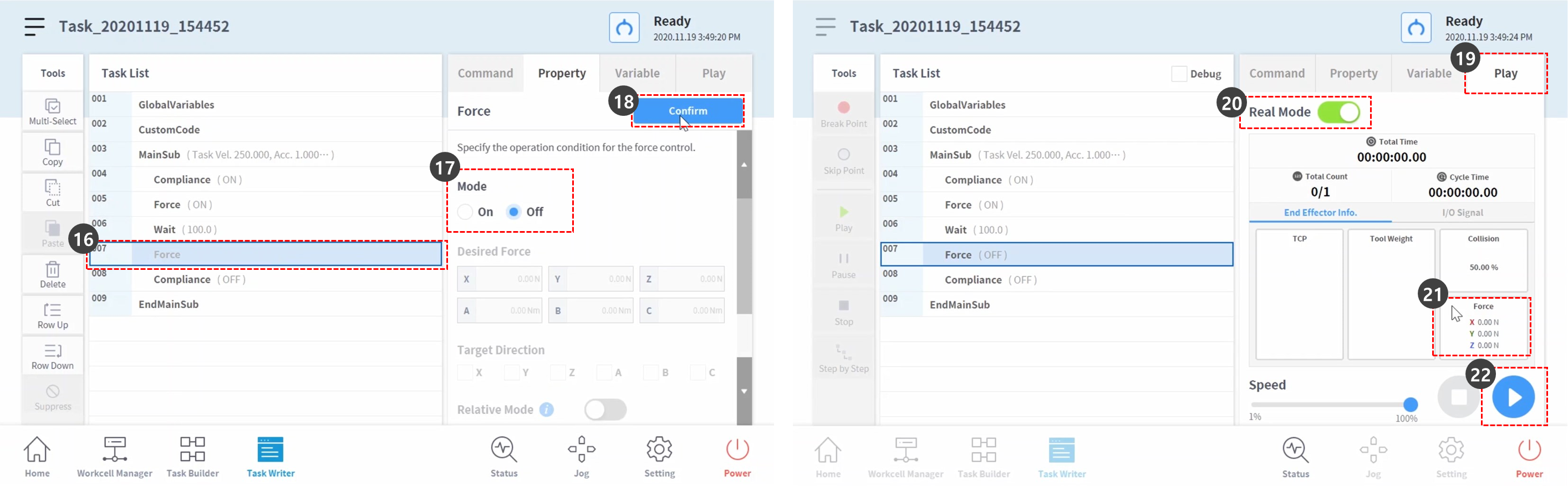
- Selecteer de opdracht forceren op de zevende regel van de takenlijst.
- Stel de modus als volgt in: Modus uit schakelt Force Control uit.
- Modus: Uit
- Druk op de bevestigingstoets.
- Selecteer het tabblad afspelen.
- Schakel de schakelknop Real Mode in.
- Zodra de schakelknop is geactiveerd, licht de knop groen op.
- Controleer of de TCP-kracht van elke as 0 is. Deze krachtwaarde is de grootte van de externe kracht die momenteel wordt toegepast op het TCP-einde van de robot.
- Druk op de knop afspelen.
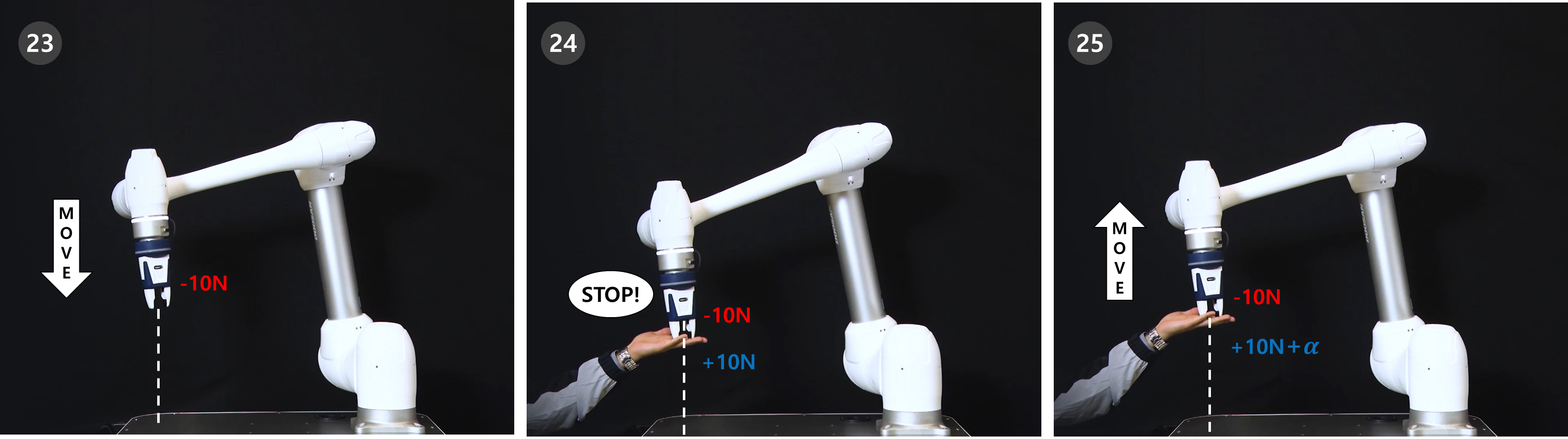
- -10N van kracht wordt uitgeoefend op het roboteinde TCP waardoor de robot langzaam in de Z-as richting beweegt.
- Het robotuiteinde weerhoudt de robotbeweging in de richting van de +Z-as, het tegenovergestelde van de bewegingsrichting van de robot. Wanneer de kracht die de robot beweegt en de beweging van de krachtafstotende robot een balans bereiken, zal de robot zijn positie handhaven alsof hij stopte.
- Als er een kracht van meer dan +10N op de robot wordt uitgeoefend, zal de robot voldoen aan de kracht die op de robot wordt uitgeoefend en in de richting van de kracht bewegen.