
Nalevingscontrole en contactdetectie
Met de functies nalevingscontrole en contactdetectie, de unieke krachtregelingstechnologie van Doosan Robotics, is het mogelijk om gemakkelijk instructies te geven zonder herhaalde bediening voor een nauwkeurige puntaanduiding, omdat het mogelijk is om tijdens het gebruik van de robot een positieafwijking te maken binnen een tolerantiebereik tussen het werkstuk en omliggende artikelen.
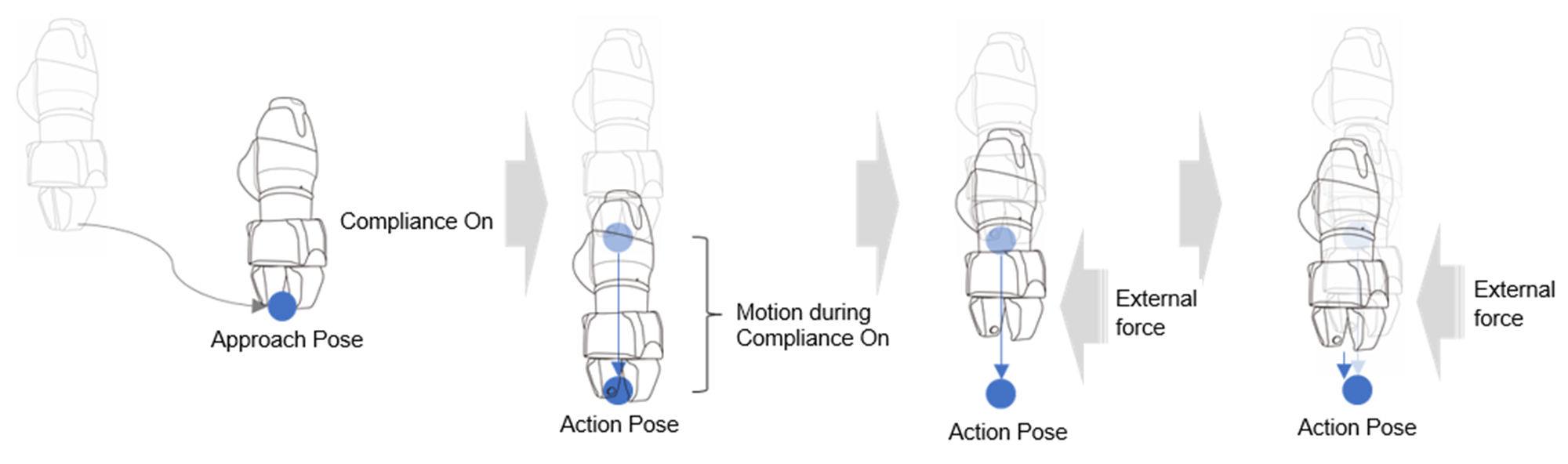
Nalevingscontrole: Als er kracht wordt uitgeoefend tijdens Benaderen, à Actie à en Terugtrekken, kan er van de ingestelde positie worden afgeweken met een zekere mate van buffering, zoals een veer.
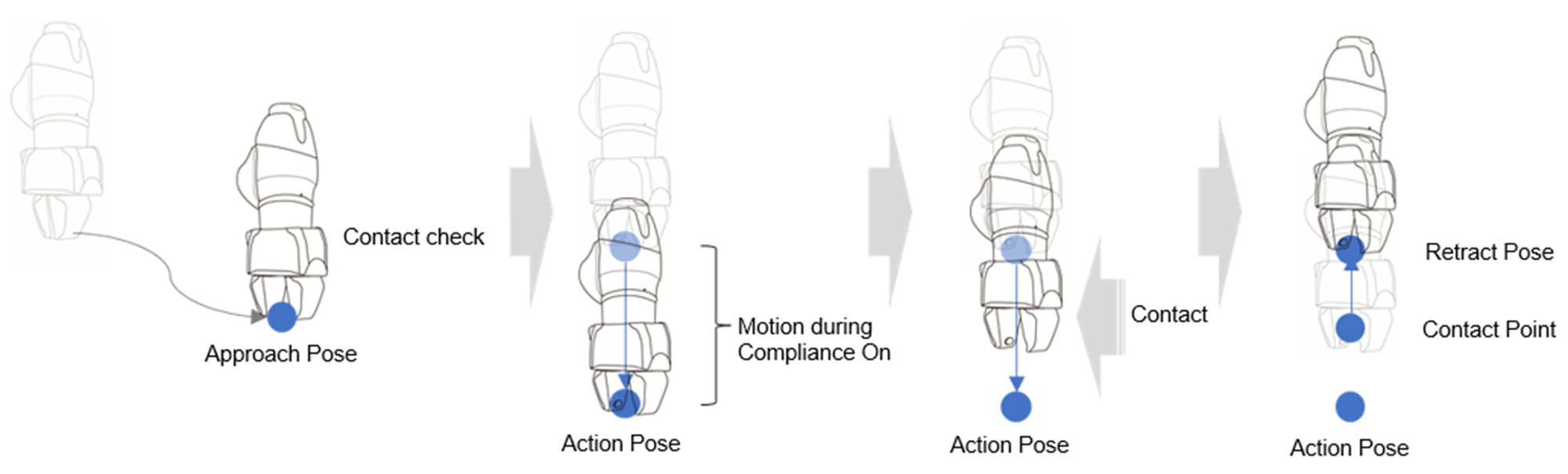
Contactcontrole: Op basis van de ingevoerde waarden van de Contactkracht en het Contactbepalingsbereik, detecteert de functie contact met het doelwit, stopt op een overeenkomstige positie en activeert de grijper om het doelwit te grijpen.
- Deze functie moet samen met de nalevingscontrolefunctie worden gebruikt. Als Kracht wordt ingevoerd zonder dat naleving is ingeschakeld, wordt er een fout gegenereerd.
- Contact is een functie die contact met een externe kracht detecteert. Dat betekent dat de gevoeligheid van de botsingsdetectie op een laag niveau moet worden ingesteld of de botsingsdetectie moet worden uitgeschakeld.
- Wees voorzichtig wanneer u deze functie gebruikt, aangezien er bij contact met de externe omgeving veel kracht kan worden gegenereerd als de stijfheidswaarde (bijvoorbeeld Z-richting) van de Compliancecontrolefunctie te hoog is of als de werksnelheid te hoog is. (Afhankelijk van de situatie moet de stijfheidswaarde worden verlaagd als de werksnelheid te hoog is of moet de stijfheid worden verhoogd als de werksnelheid te laag is.)
Let op
- Als FTS niet is geïnstalleerd bij gebruik van de A-serie, kan de functie contactdetectie niet worden gebruikt: In dit geval is het gebruik van de nalevingscontrole beperkt en kan de stijfheid alleen in de translatierichting (X, Y, Z) worden gewijzigd.