
Max last binnen werkruimte
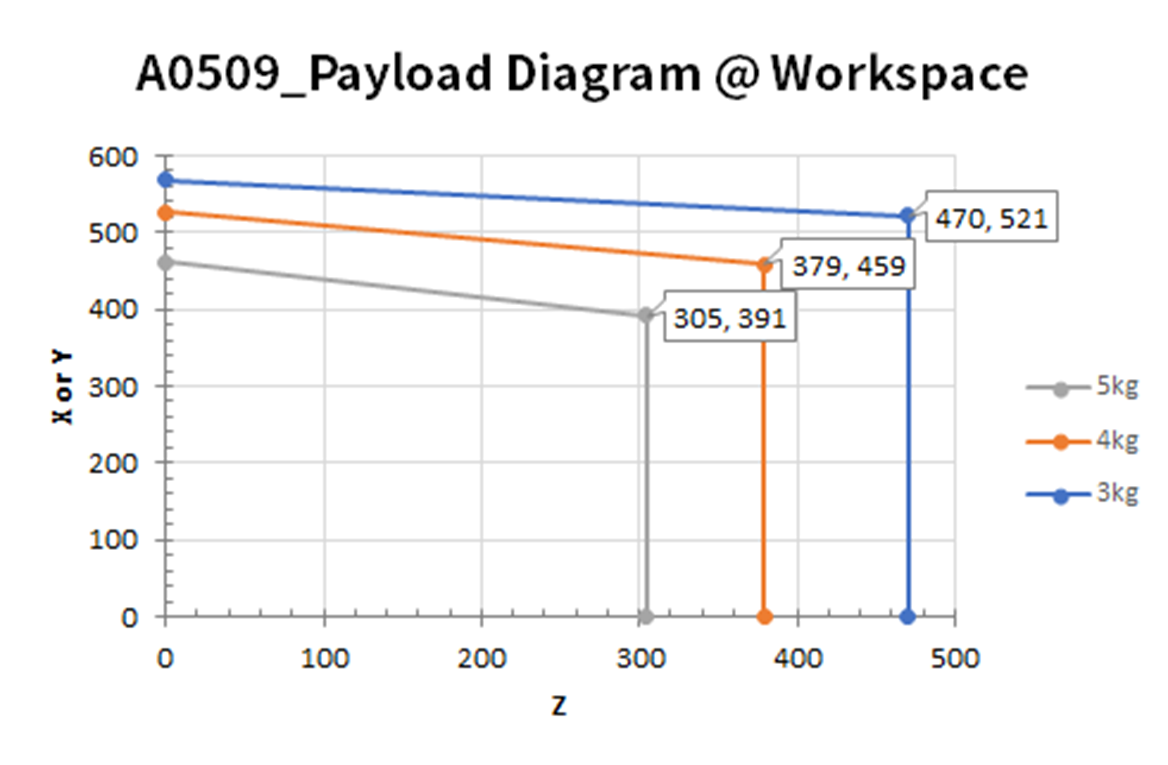
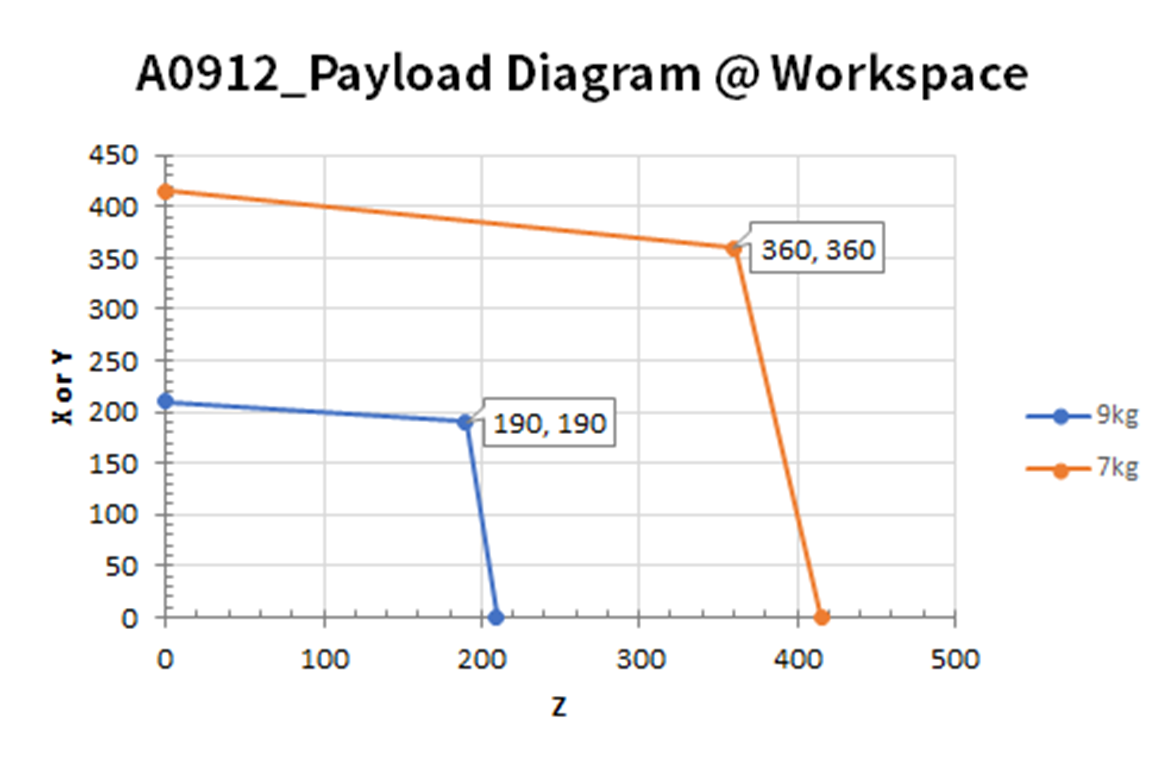
Het maximale laadvermogen van de robot binnen zijn werkruimte verandert afhankelijk van de afstand tot het zwaartepunt. Het laadvermogen per afstand is als volgt:
Opmerking
Dit belastingsdiagram gaat uit van een kleine toolbelasting. Tools met een groter volume zullen grotere beperkingen hebben in het laadvermogen boven het zwaartepunt van de tool in vergelijking met een tool met een gelijk gewicht maar een kleiner volume, en in dergelijke gevallen kunnen er trillingen optreden.
A0509
A0912
Toegestaan momentum en inertie
Het toegestane moment en de toegestane inertie voor de robot J4-J6 zijn als volgt:
| Modelnaam | J4 | J5 | J6 | |||
|---|---|---|---|---|---|---|
| Toegestaan moment | Inertie | Toegestaan moment | Inertie | Toegestaan moment | Inertie | |
A0509 | 50 Nm | 0.69 kg㎡ | 50 Nm | 0.69 kg㎡ | 50 Nm | 0.69 kg㎡ |
A0912 | ||||||
A0509s | 11 Nm | 0.15 kg㎡ | 11 Nm | 0.15 kg㎡ | 11 Nm | 0.15 kg㎡ |
A0912s | ||||||