
Jog+
Met Jog+ kunt u de jog-functie gelijktijdig gebruiken terwijl andere werkzaamheden worden uitgevoerd.
Dit kan worden gebruikt wanneer een nauwkeurige beweging naar het doelpunt vereist is tijdens het aanleren van de robot.
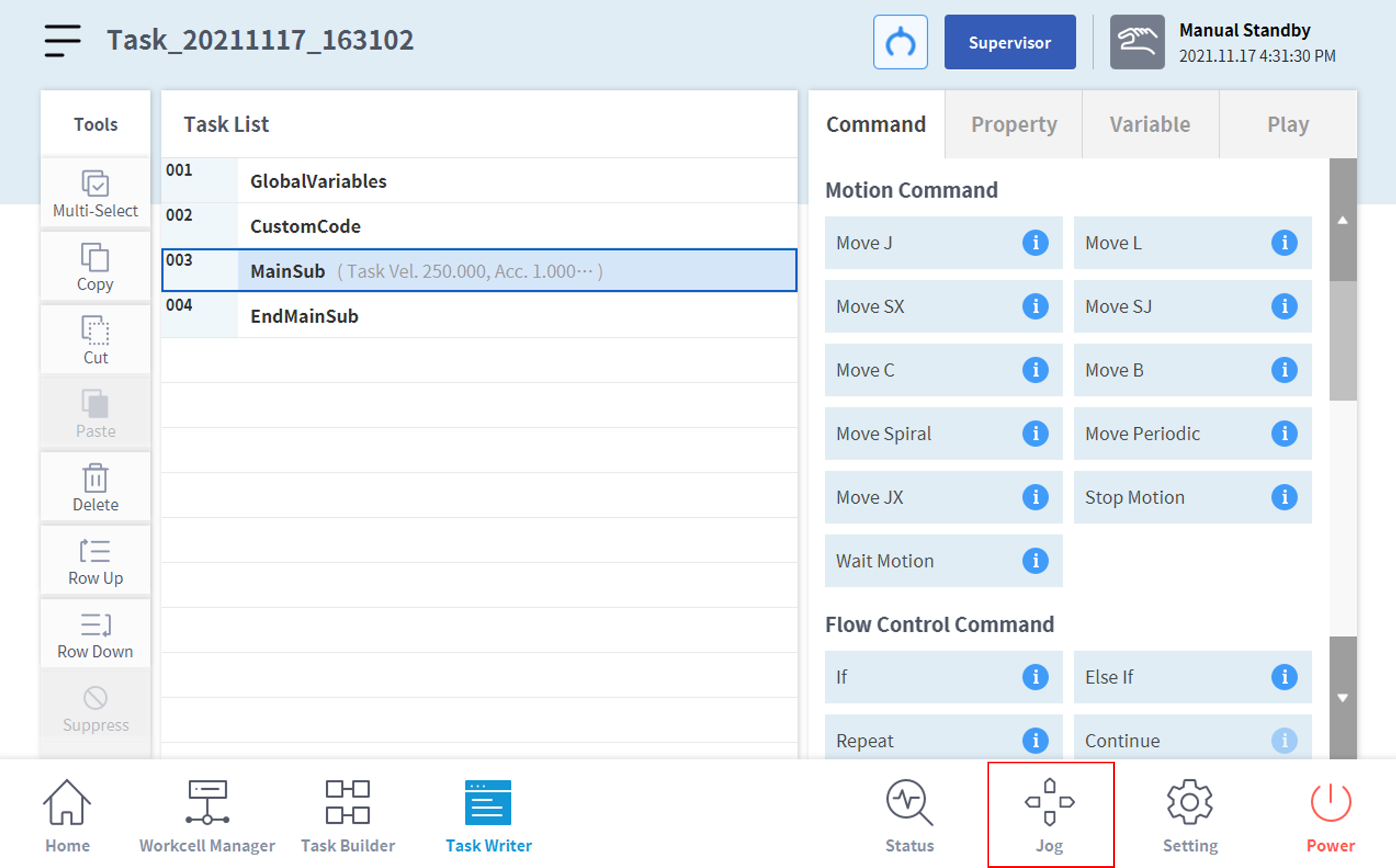
Jog Plus kan op de volgende manieren worden geactiveerd:
- Houd de jog-knop langer dan 1 seconde ingedrukt in het hoofdmenu onderaan het scherm.
- Het Jog Plus-scherm wordt geactiveerd.
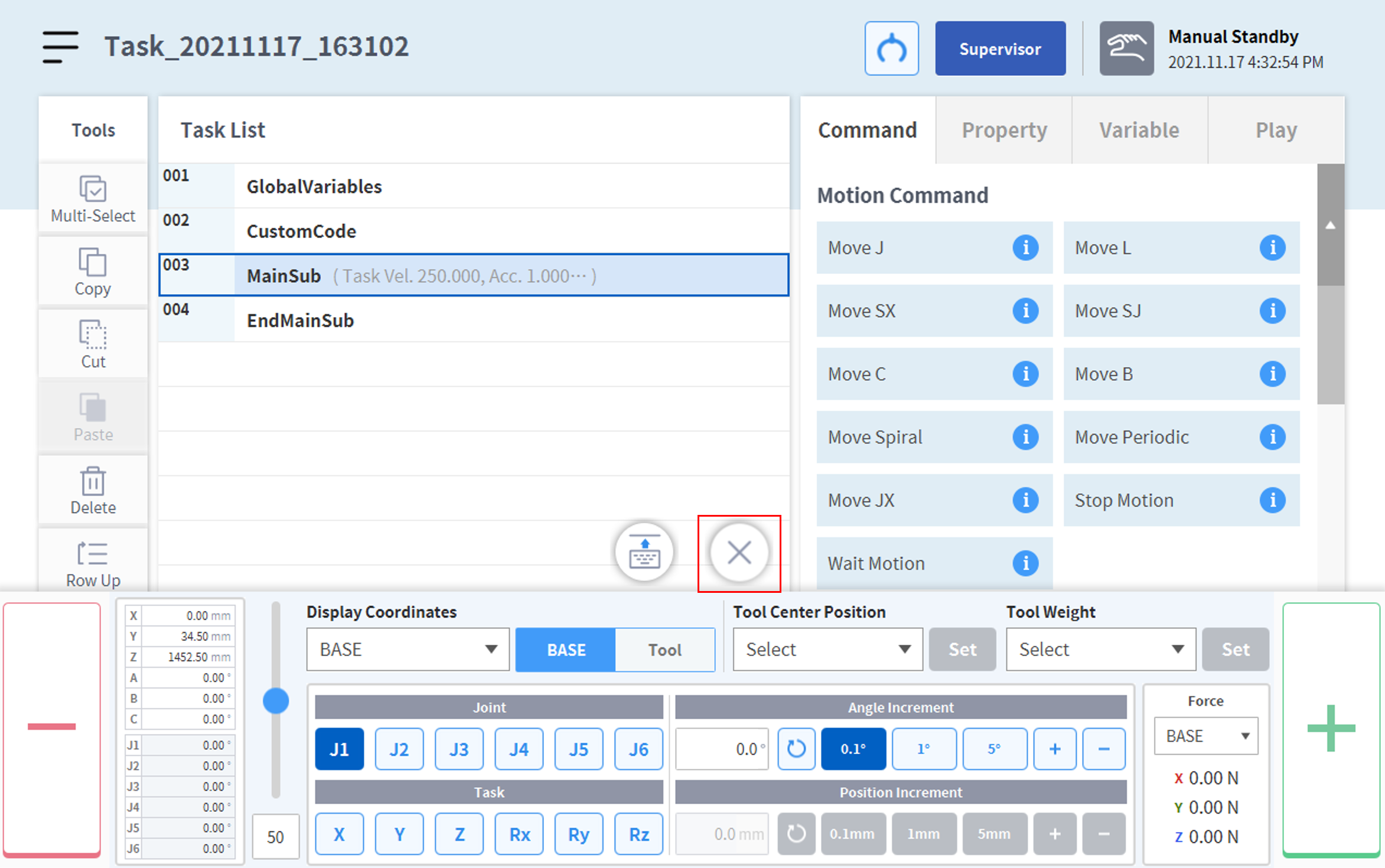
Jog Plus kan worden uitgeschakeld door op de 'X'-knop te drukken.
Nr. | Item | Omschrijving |
|---|---|---|
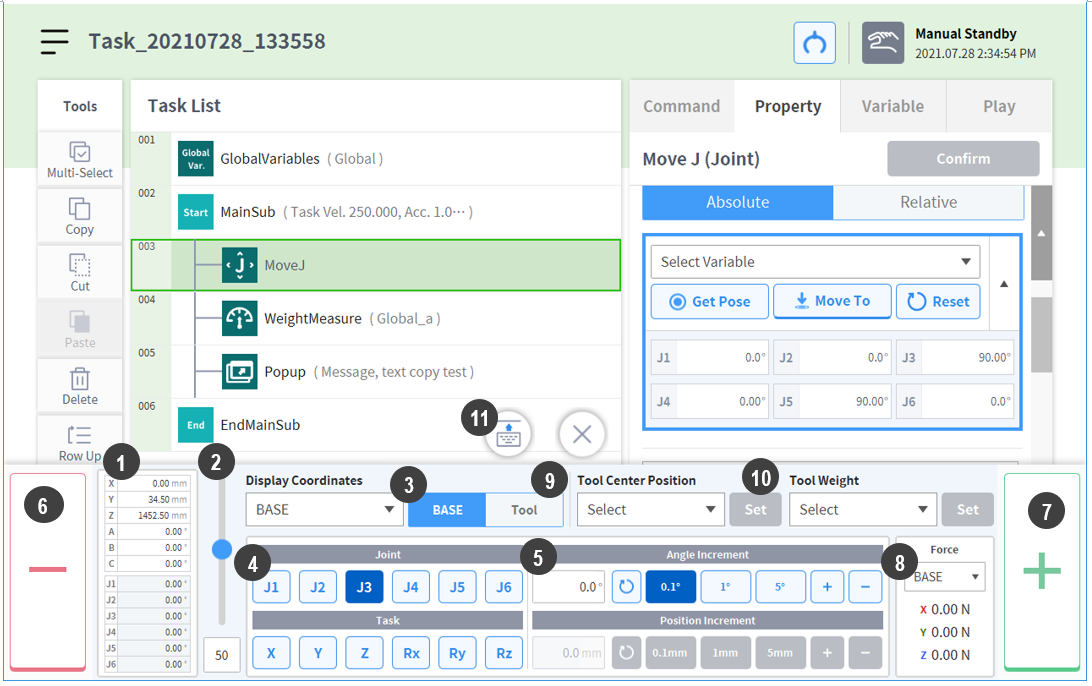
1 | Current robot pose | Geeft de robotpositie weer op basis van de ingestelde weergavecoördinaten. |
2 | Manual Mode Speed | Configureert de bewegingssnelheid van de robot in de handmatige modus. U kunt de snelheid aanpassen door de schuifregelaar te slepen. Als de schuifregelaar op 100% staat, zal de hoogste corresponderende maximale gewrichtssnelheid op het tabblad Jog 30 graden/s zijn en de hoogste taaksnelheid 250 mm/s. Deze snelheid heeft invloed op de snelheid die wordt geregeld door de jog- en bewegingsknoppen. |
3 | Reference Point Setting | Hiermee configureert u het referentiepunt om de taakcoördinaat uit te lijnen. Basis: Hiermee configureert u de taakcoördinaat op basis van de robotbasis. World: Stelt taakcoördinaten in op basis van de ingestelde wereldcoördinaten. Gereedschap: Hiermee configureert u de taakcoördinaat op basis van het gereedschap dat aan het einde van de zes-as van de robot is bevestigd. |
4 | Select Axis | Selecteert de as die moet worden verplaatst. Tabblad Gewricht: Selecteer een as uit J1 - J6. Tabblad Taak: Selecteer een as uit X - Rz. |
5 | Select Increment | Geeft een getal in dat aangeeft hoeveel de geselecteerde as moet worden verplaatst. |
6 | Move – Button | Als de toets ingedrukt wordt gehouden, wordt de geselecteerde as in de richting - verplaatst overeenkomstig de incrementeringslocatie. |
7 | Move + Button | Als de toets ingedrukt wordt gehouden, wordt de geselecteerde as in de richting + verplaatst overeenkomstig de incrementeringslocatie. |
8 | Force Monitoring | Toont de optredende externe kracht gebaseerd op het geselecteerde coördinatensysteem. |
9 | TCP Setting: | Stelt TTCP in. |
10 | Tool Weight Indicator | Stelt het gereedschapsgewicht in. |
11 | Change Jog+ location | Verandert de locatie van Jog+ naar de boven- of onderkant van het scherm. |