
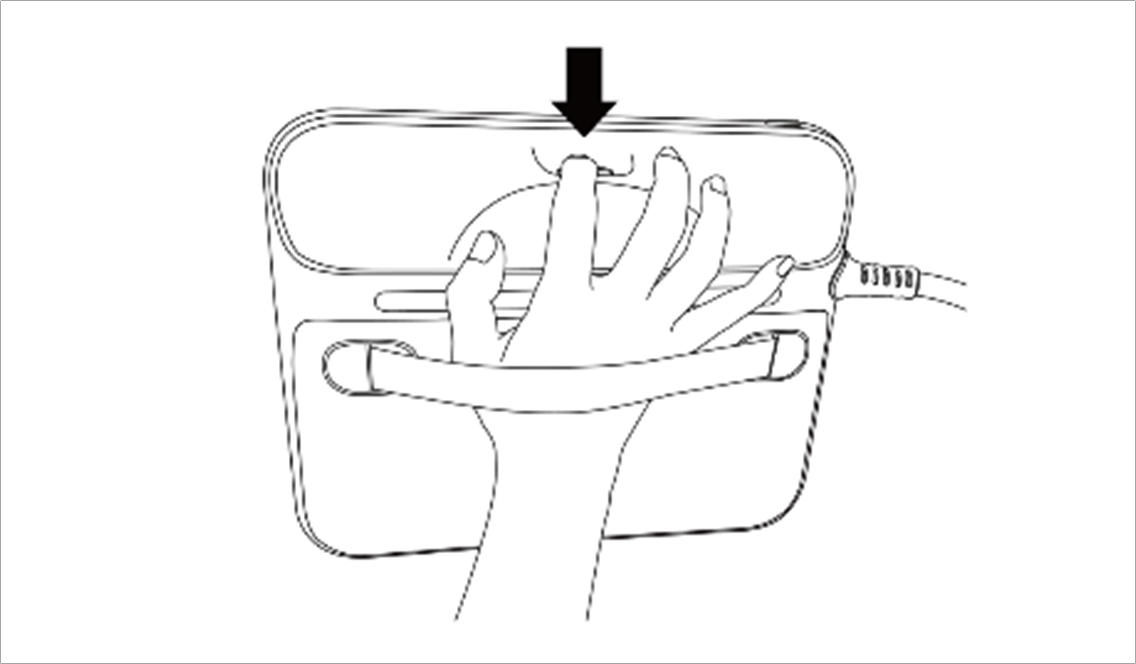
Handgeleidingsknop op de instructiependant
De gebruiker kan de pose van de robot veranderen terwijl hij de knop Handgeleiding op de achterkant van de instructiependant ingedrukt houdt.
Opmerking
Standaard kan de knop Handgeleiding alleen worden gebruikt in de handmatige modus. Deze kan niet worden gebruikt in de Automatische modus wanneer de taakprogramma's van de Task Builder en Task Writer actief zijn. Als de robot echter met de opdracht Handgeleiding van de Task Writer is ingesteld op de status Handgeleiding gereed, kan de knop zelfs in de Automatische modus worden gebruikt.