
Gebruikerscoördinaten instellen
De coördinaten die het werkstuk vertegenwoordigen, kunnen worden ingesteld. Dit coördinaat wordt Gebruikerscoördinaten genoemd en is niet hetzelfde als de Wereldcoördinaten. Het is mogelijk om de pose van Gebruikerscoördinaten in te stellen met behulp van de Basis- of Wereldcoördinaten, en Gebruikerscoördinaten kunnen worden geselecteerd bij het instrueren en verplaatsen met de robot vanuit Task Builder en Task Writer. Als u Gebruikerscoördinaten wilt instellen, tikt u op de knop
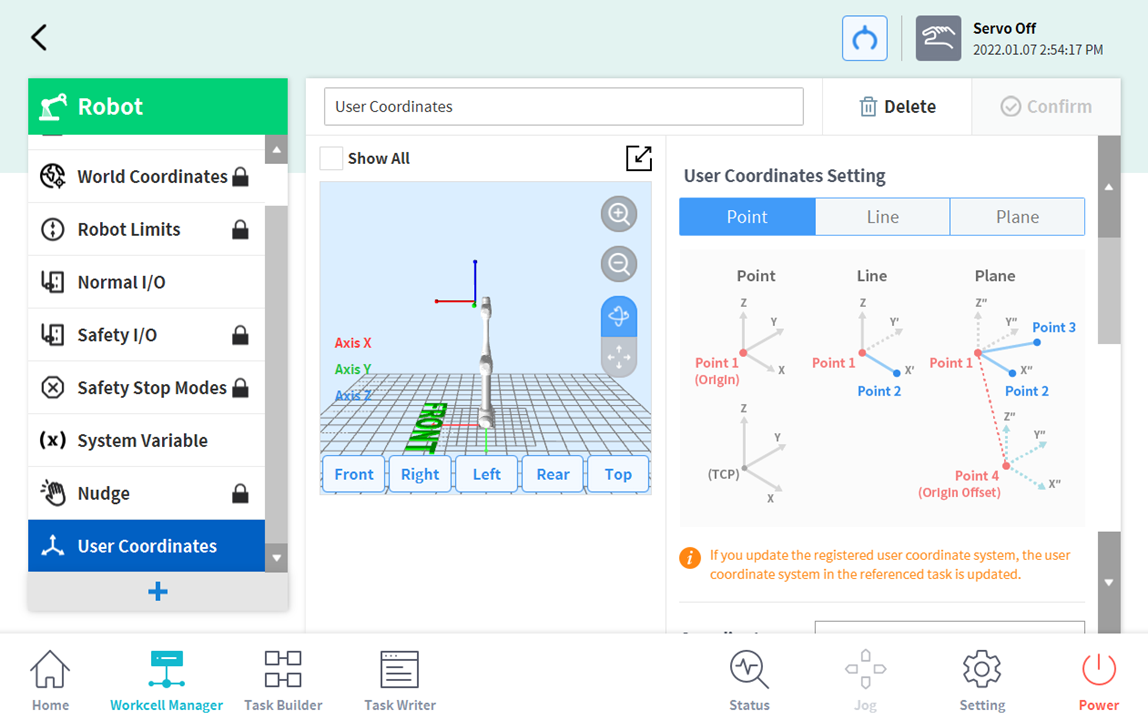
- Voer de waarden in die nodig zijn voor de instellingen.
- Zorg ervoor dat u de beschrijvingsafbeelding en de waarschuwingspunten van de Gebruikerscoördinaten leest.
- Gebruikerscoördinaten kunnen op basis van 1 punt, 2 punten en 3 punten worden aangemaakt.
- Het is mogelijk om palletcoördinaten te laden vanuit Geavanceerde opties en deze toe te passen op Gebruikerscoördinaatpunten.