
Gebruik Sub/Call Sub
OPTIONEEL NORMAAL 5 MIN.
Sub is een afkorting van subroutine. Een subroutine verwijst naar een proces dat het aantal stappen in een programma minimaliseert door noodzakelijke onderdelen te bellen wanneer er twee of meer dubbele onderdelen aanwezig zijn.
- Doosan Robotics-robots bieden een CallSub-commando om Sub-commando's en de bijbehorende subaraine op te roepen.
- De Sub-opdracht werkt zoals gedefinieerd in Python.
Opmerking
- Subalinea moet worden toegevoegd in HoofdSub, het begin van een hoofdalinea en eindMainSub, het einde van een hoofdalinea.
- Naast herhaling wordt de Sub-opdracht ook gebruikt om een hoofdsalineparagraaf te vereenvoudigen. Door gebruik te maken van een Sub-opdracht kan op intuïtieve wijze worden vastgesteld welke taak van een hoofdaparagraaf momenteel wordt uitgevoerd.
- Met behulp van een Sub-opdracht kan een subaraineenheid worden getest.
(YouTube)
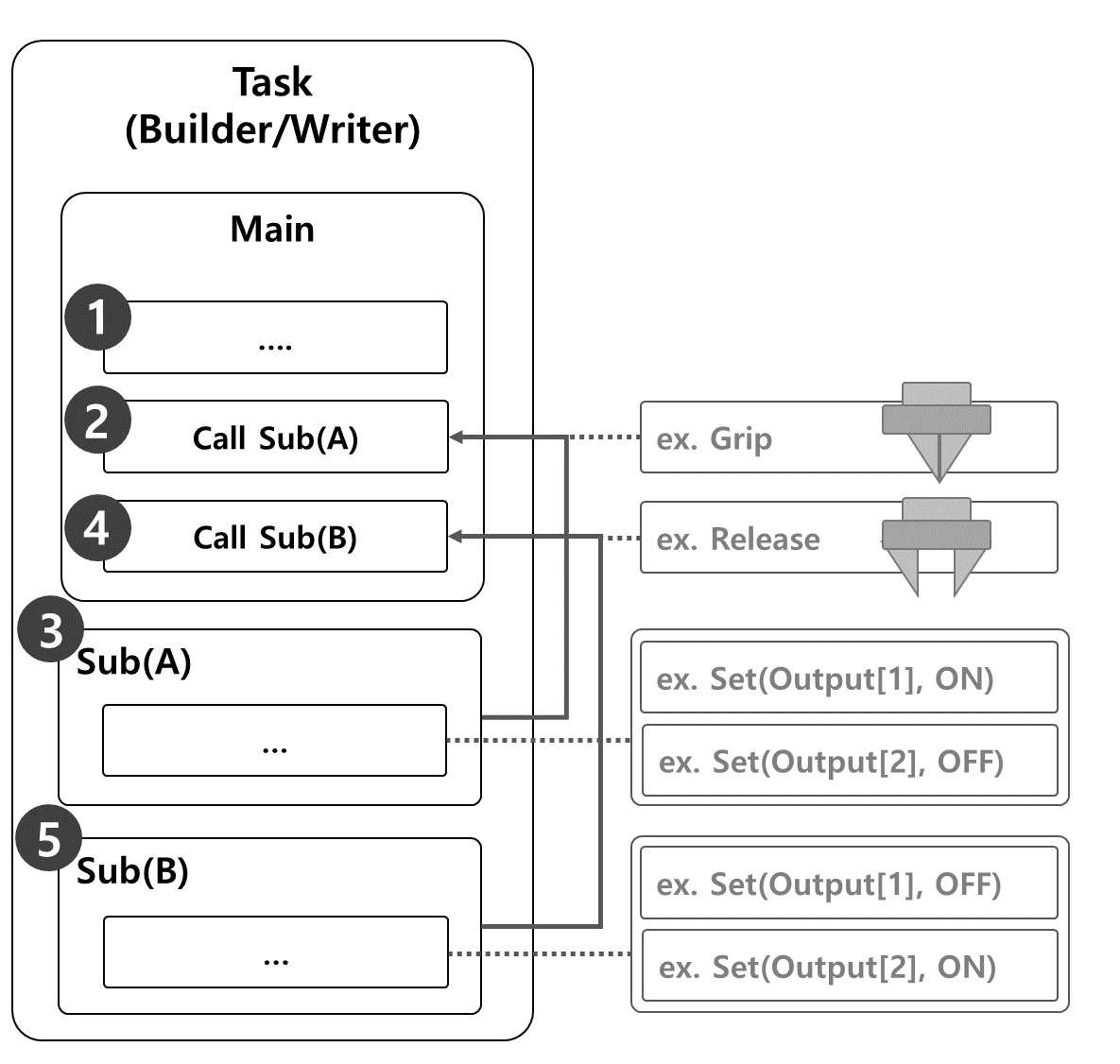
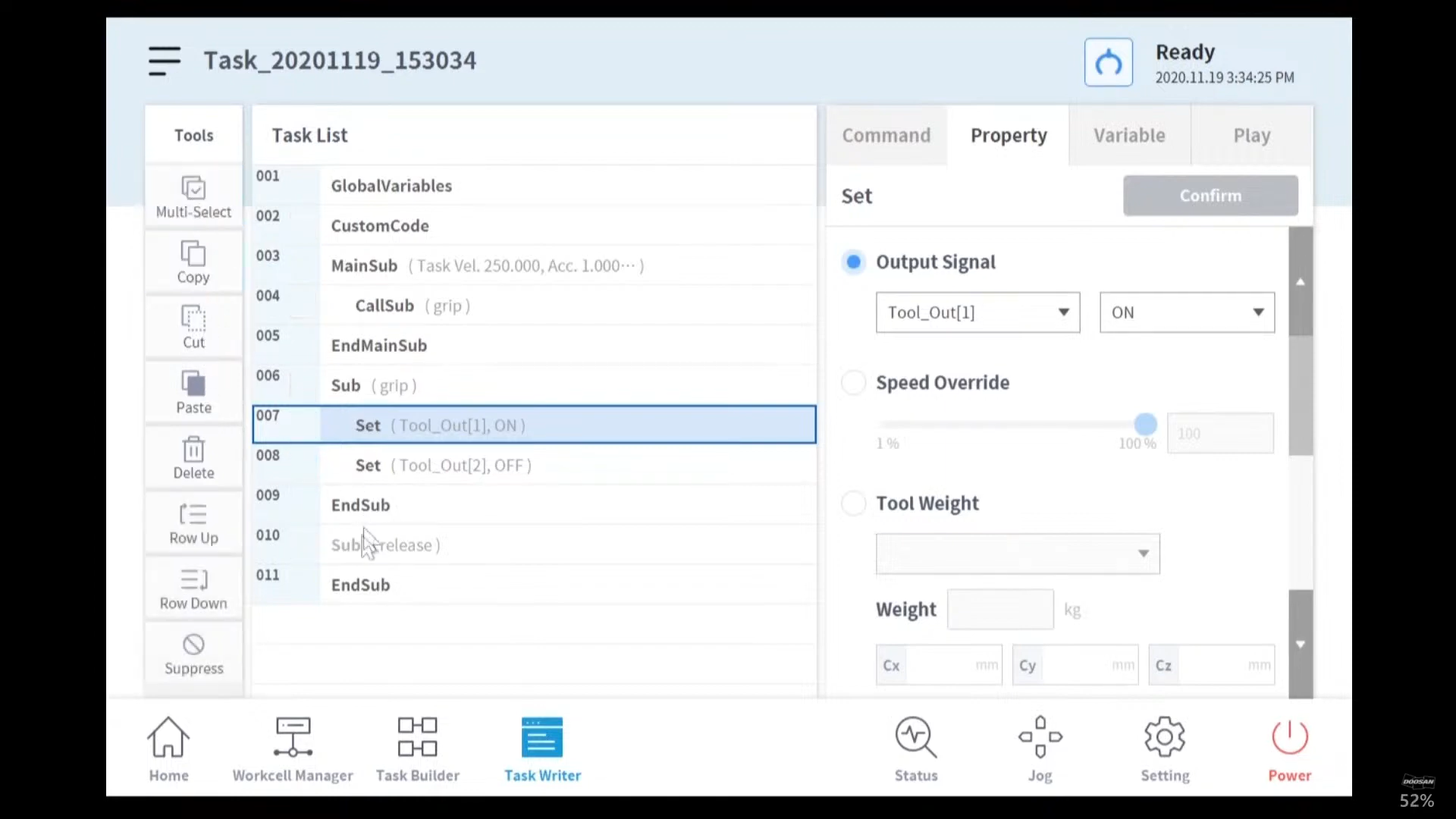
Het voorbeeld waar een Sub-opdracht wordt gebruikt om grip- en loszetten van een robotgrijper uit te voeren bestaat uit het volgende.
- Regels van de hoofdalinea voeren het taakprogramma in opeenvolgende volgorde uit, beginnend vanaf de eerste regel.
- Ga naar Sub(A) aangeroepen door Call Sub.
- Monster
- Programma: Noem de Grip-subroutine.
- Robot: Geen beweging.
- Monster
- Sub(A) wordt uitgevoerd. Alle subalinea-regels worden in opeenvolgende volgorde uitgevoerd, keert terug naar de hoofdalinea en voert de volgende regel uit.
- Monster
- Programma: Voer de Grip subroutine-lijnen in opeenvolgende volgorde uit. Gebruik de opdracht set om Output [1] in te stellen op ON en Output [2] op OFF.
- Robot: De robotgrijper voert een Grip-beweging uit.
- Monster
- Ga naar Sub(B) aangeroepen door Call Sub.
- Monster
- Programma: Bel de Release subroutine.
- Robot: Geen beweging.
- Monster
- Sub(B) wordt uitgevoerd. Alle subalinea-regels worden in opeenvolgende volgorde uitgevoerd, keert terug naar de hoofdalinea en voert de volgende regel uit.
- Monster
- Programma: Voer de Grip subroutine-lijnen in opeenvolgende volgorde uit. Gebruik de opdracht set om Output [1] in te stellen op OFF (UIT) en Output [2] op ON (AAN).
- Robot: De robotgrijper voert de Release-beweging uit.
- Monster
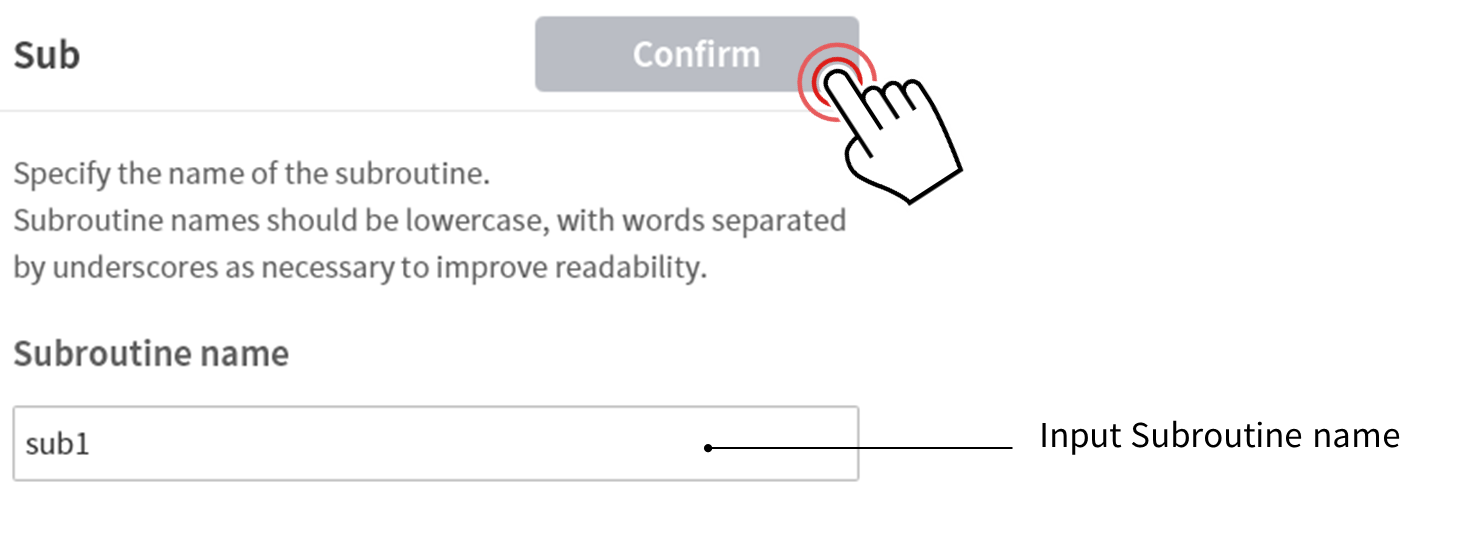
Subopdracht toevoegen
- Voeg de Sub-opdracht toe vanuit de Taakbouwer of Taakschrijver.
- Voer de naam van de subroutine in.
- Ga verder met bevestigen.
Opdracht CallSub toevoegen
- Voeg de opdracht CallSub toe vanuit Taakbouwer of Taakschrijver.
- Selecteer de naam van de subroutine die is geregistreerd met de opdracht Sub.
- Ga verder met bevestigen.
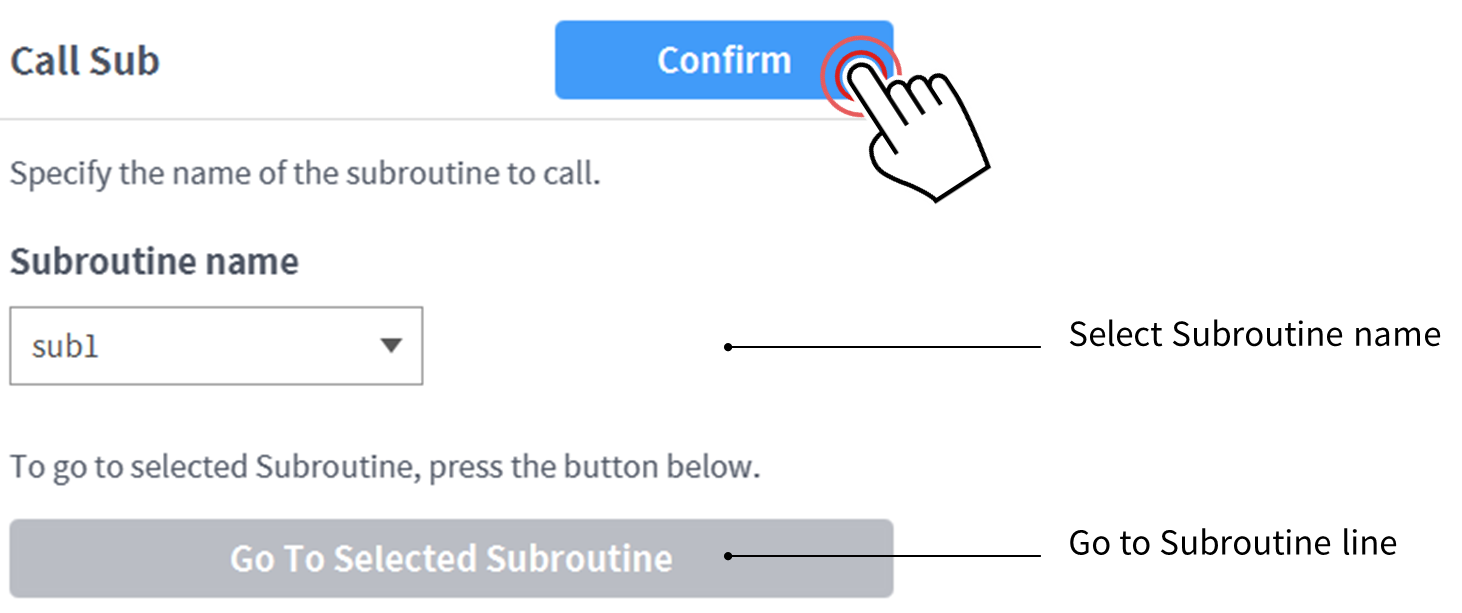
Opmerking
- Als het aantal lijnen in het taakprogramma toeneemt, kan het moeilijk worden om subroutines te vinden. Raak in dat geval de opdracht Ga naar geselecteerde subroutine in de eigenschap van CallSub aan om de focus te verplaatsen naar de bijbehorende suboregel.