
De robot vastzetten
Zet de manipulator vast door M8-bouten vast te draaien in de vier 9,5 mm-openingen in de robotvoet.
- Het wordt aanbevolen om een “aandraaimoment” van 20 Nm te gebruiken om de bouten aan te draaien. Gebruik afdichtingsringen (plat) om te voorkomen dat ze los trillen.
- Gebruik een markeringspin Φ5 om de robot nauwkeurig op een vaste plaats te installeren.
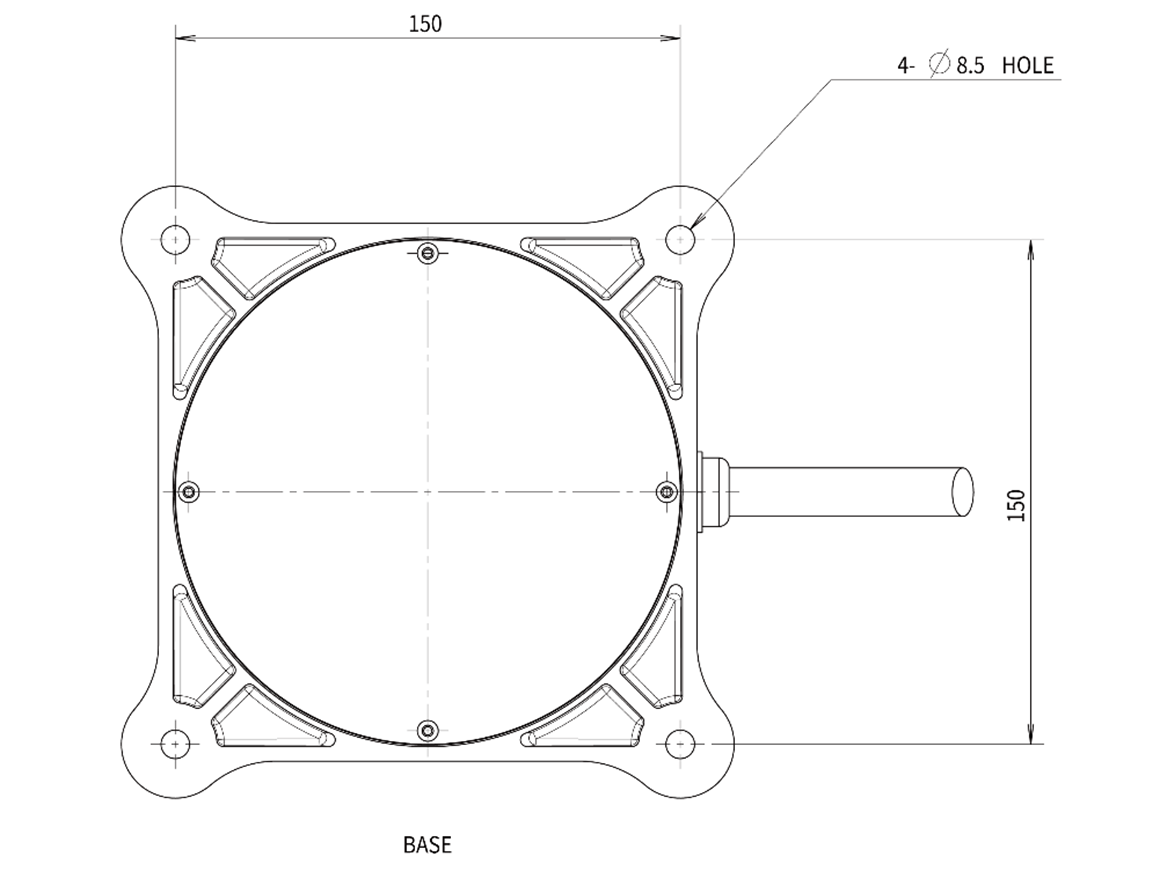
Tekening van de manipulatorvoet, met vier M8-bouten. Eenheid [mm]
Waarschuwing
- Draai de bouten volledig vast om te voorkomen dat ze tijdens de werking van de manipulator los raken.
- Installeer de voet van de manipulator op een stevige ondergrond die bestand is tegen de belasting die tijdens het gebruik wordt gegenereerd (10 keer het maximale koppel en 5 keer het gewicht van de manipulator).
- De manipulator zal de basistrilling interpreteren als een botsing en de noodstop activeren. In het geval van installatielocaties die automatisch van positie veranderen, dient u de voet van de manipulator daarom niet te installeren op een locatie met een hoge bewegingsversnelling.
- Monteer de manipulator op een specifieke plaats met behulp een geschikte methode. Het bevestigingsoppervlak moet stevig zijn.
- De manipulator kan beschadigd raken als deze langere tijd in contact is met water. Gebruik deze daarom niet in een natte omgeving of onder water.