
Ruimtelimiet instellen
Als u de ruimtelimieten voor de robot wilt instellen, tikt u op de knop 
- Voer de naam van de werkcel in het veld Werkcelnaam , bovenin het scherm Werkcel instellen, in.
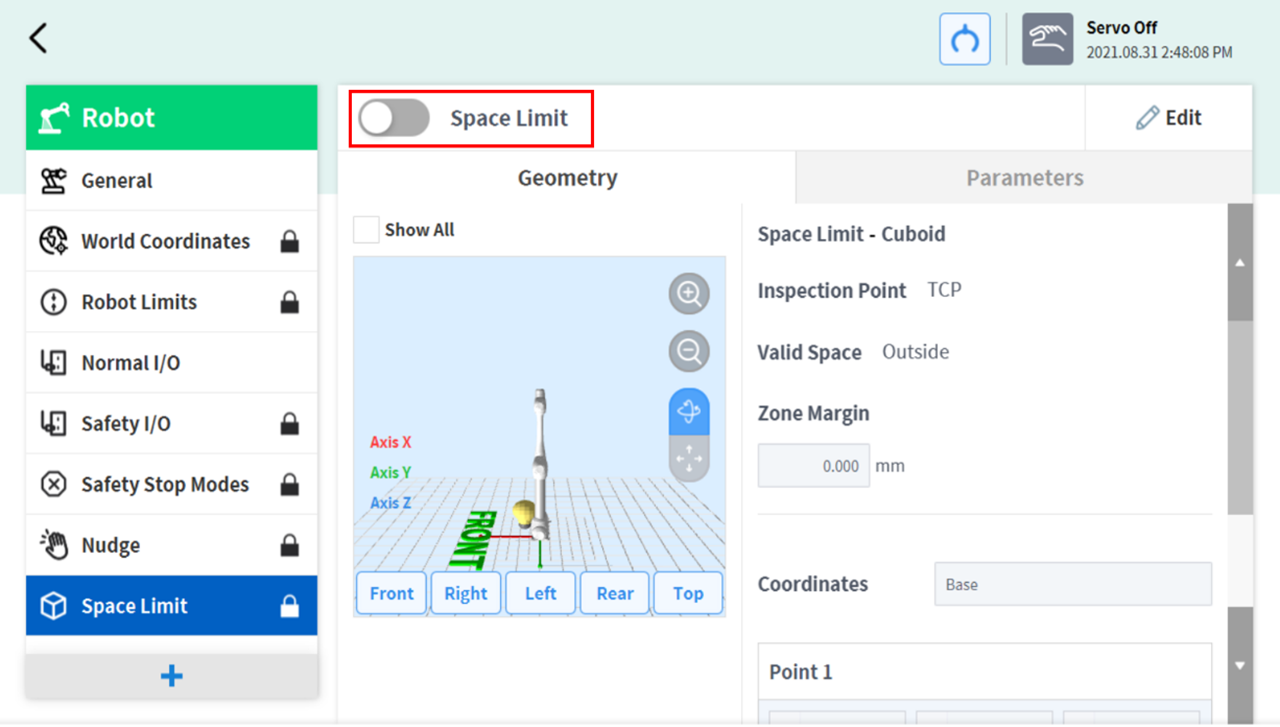
- Stel de posegegevens in volgens de vorm van de Ruimtelimiet samen met Inspection Point (Inspectiepunt), Valid Space (Geldige ruimte) en Zone Margin (Zonemarge) in het tabblad Geometrie.
- Stel Dynamic Zone Enable en Advanced Options in op het tabblad Parameters en druk op Draft.
- Controleer of alle weergegeven parameters overeenkomen met de voorgenomen instelling, vink vervolgens Confirm draft (Concept bevestigen) aan en druk op Confirm (Bevestigen)
- Press the Activate Toggle button to apply the Space Limit.
Opmerking
Afhankelijk van de instellingsmethoden zijn er standaardzonemarges.
- Als de gereedschapsvorm is ingesteld en Body volume check niet is geselecteerd, is de TCP-marge 0 mm.
- Als de toolvorm is ingestelden Lichaamsvolume wel is aangevinkt, is de TCP-marge 0 mm.
- Als de gereedschapsvorm niet is ingesteld en Body volume check niet is geselecteerd, is de TCP-marge 0 mm.
- Als de gereedschapsvorm niet is ingesteld en Body volume check niet is geselecteerd, is de TCP-marge 60 mm.