
Waypoints instellen
Voer de onderstaande stappen uit om de waypoint van een opdracht te configureren:
- Selecteer het type (Absoluut, Relatief) voor de referentiecoördinaat en de coördinaatwaarde.
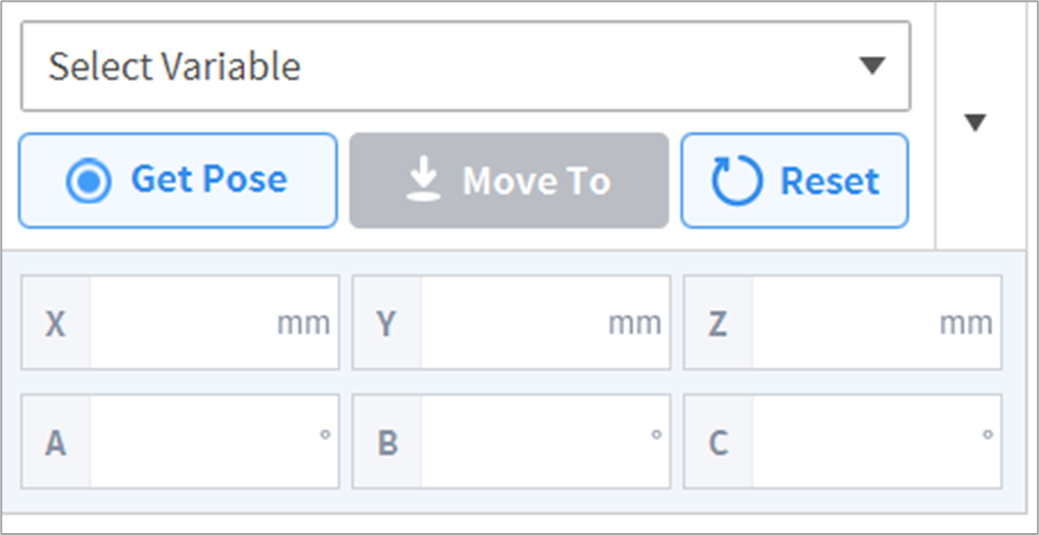
- Gebruik de jogfunctie of voer directe instructie uit om de robot naar de gewenste positie te verplaatsen.
- Tik op de knop Pose opslaan om de positie van de robottool op te slaan.
- Definieer indien nodig een variabele met behulp van GlobalVariables of de opdracht Definiëren.
- Definieer indien nodig een variabele met behulp van GlobalVariables of de opdracht Definiëren.
Opmerking
- Projection pose converteert de invoercoördinaatwaarden naar coördinaatwaarden die kunnen worden verplaatst door een robot met 5 vrijheidsgraden.
- De projectieposeknop wordt alleen ondersteund op modellen uit de P-serie.