
Middelpunt van de tool (TCP) instellen
Bij het configureren van het gereedschapsmiddelpunt (TCP) moeten bovendien de positie en de rotatiehoek op basis van de flenscoördinaten worden gedefinieerd. De afstand van het standaard startpunt van de flenscoördinaat tot het gereedschapsmiddelpunt (TCP) in de X-, Y- en Z-richting kan niet groter zijn dan 10.000 mm. Als de geconverteerde lengtes ( 
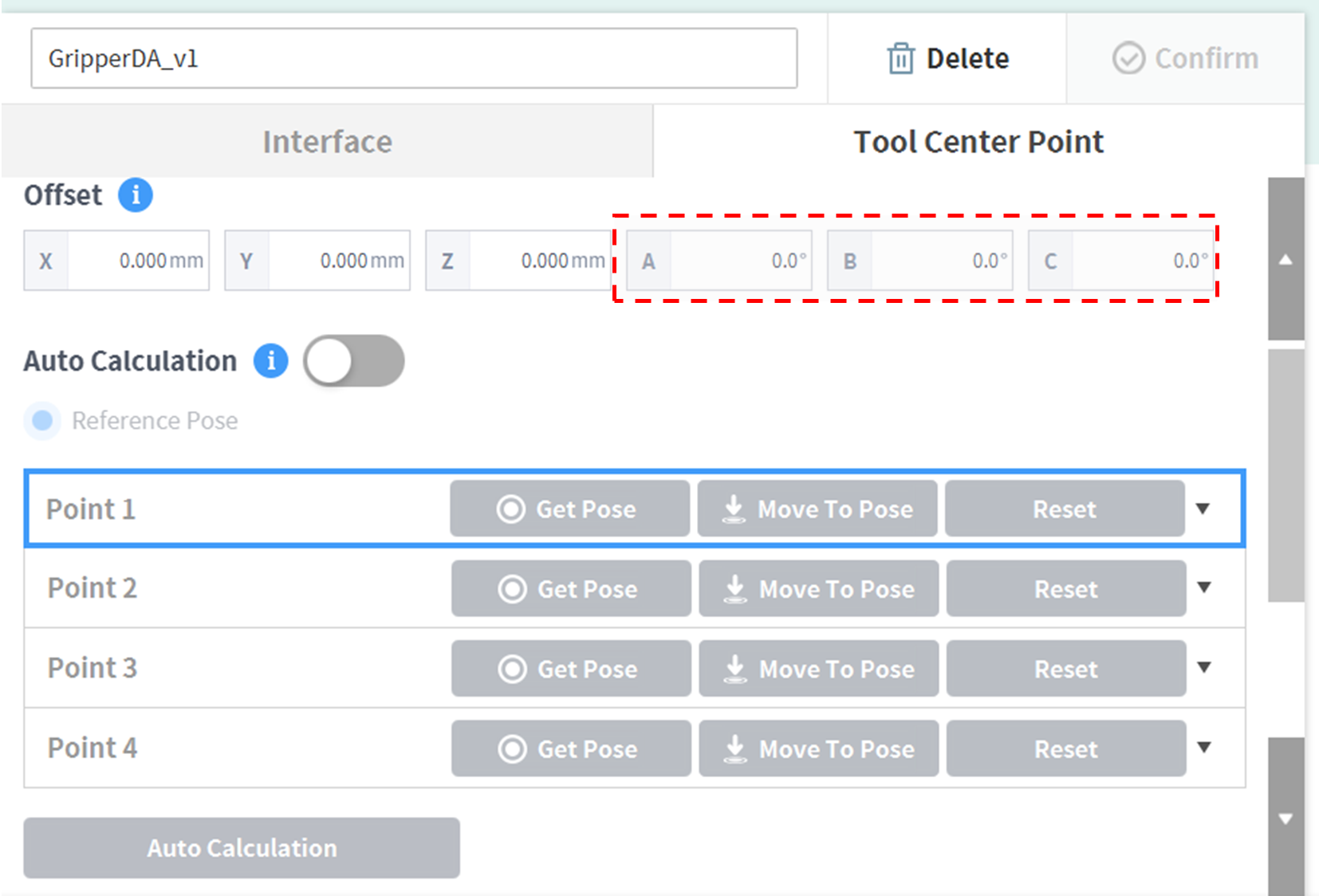
In het bijzonder, als TCP is geconfigureerd met Auto Calculate, wordt de berekening alleen gemaakt op basis van de X-, Y- en Z-posities, dus het is noodzakelijk om de rotatiehoek in te voeren. De rotatiehoek kan worden gedefinieerd met de items A, B en C, en is gebaseerd op de Euler Z-Y-Z-rotatiemethode.
De definities van de coördinaatas, uitgedrukt in x, y, z, en de coördinaatas, uitgedrukt in X, Y, Z, luiden als volgt:
- Coördinaatas van flenscoördinaat (x, y, z): De richting van de coördinaatas die aan het einde van de flens is gedefinieerd, is identiek aan de robotcoördinaat met een robotgewrichtshoek van (0,0,0,0,0,0).
- Coördinaatas van TCP-coördinaat (X,Y,Z): De coördinaatas wordt gedefinieerd aan het einde van de tool die is geïnstalleerd aan het einde van de fles of het werkpunt. De rotatiehoek van de TCP-coördinaat wordt gedefinieerd op basis van de flenscoördinaat in de volgorde 1) tot 3) (zie hieronder):
1) Draai A graden langs de Z-as van de flenscoördinaat
2) Draai B graden langs de Y'-as van de coördinaat die is gedraaid volgens 1)
3) Draai C graden langs de Z''-as van de coördinaat die is gedraaid volgens 2)
Hier volgen enkele voorbeelden van de configuratie van het TCP volgens de hierboven beschreven methode:
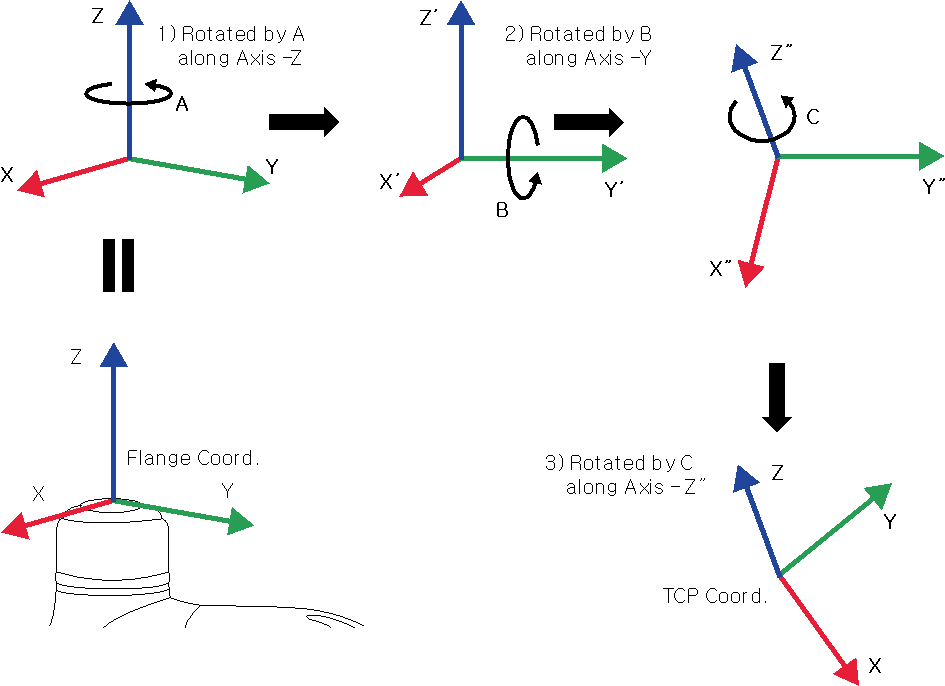
- [X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Algemene grijper met offset in Z-richting (TCP-coörd)
- [X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: Linkergrijper met hoek van 45-graden (TCP-coörd. L)
- [X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: Rechtergrijper met hoek van 45-graden (TCP-coörd. R)