Inzicht in naleving/controle van de macht
OPTIONEEL HARD 20 MIN.
Force Control en Compliance Control zijn functies die de kracht van de robot regelen. Deze functies regelen ook het uitvoeren van bewegingsbeweging en krachtregeling als er een bewegingsopdracht wordt toegevoegd. Compliance-controle en force control hebben de volgende verschillen:
- Controle op naleving
- De robot voldoet aan de externe kracht aan het einde van de robot TCP tijdens compliancecontrole, en wanneer de externe kracht wordt verwijderd, wordt een kracht gecreëerd die de robot weer in zijn oorspronkelijke positie zet, waardoor de robot zich naar de overeenkomstige positie beweegt.
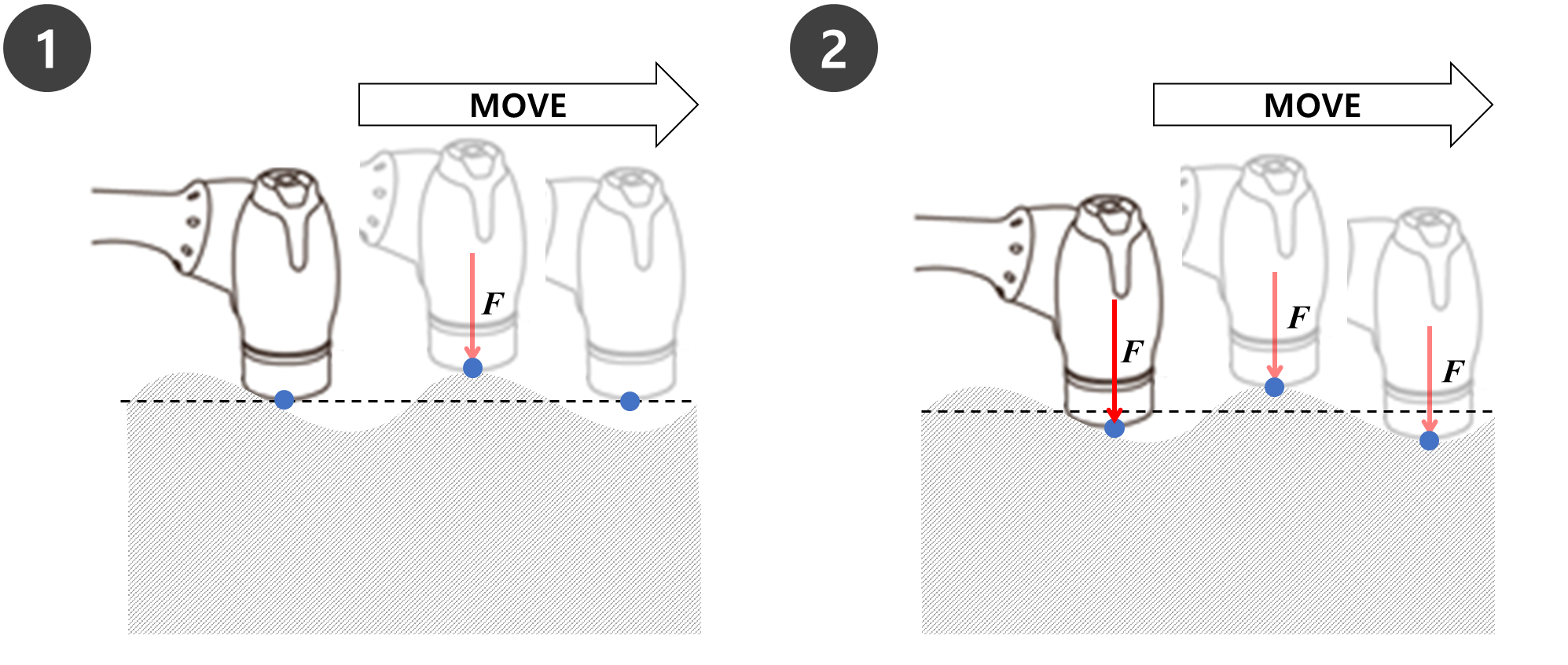
- Deze kan worden gebruikt wanneer lineaire beweging nodig is op een ongelijk oppervlak zonder de robot en het oppervlak te beschadigen. Deze kan worden gebruikt om onverwachte botsingen rond het werkstuk te voorkomen.
- Krachtregeling
- Tijdens de krachtregeling wordt kracht gegenereerd aan het einde van de robot TCP. Versnelling wordt gegenereerd in de richting waarin de kracht wordt gegenereerd, zodat de robot tegelijkertijd zowel in de richting van de bewegingsrichting als in de richting van de kracht beweegt.
- Wanneer er contact wordt gemaakt met een object, wordt kracht uitgeoefend op het object totdat de ingestelde kracht en de afweerkracht van het object een balans vormen.
- Deze kan worden gebruikt wanneer gelijke kracht moet worden uitgeoefend op een lineaire beweging op een ongelijk oppervlak. Het kan worden gebruikt in taken die constante kracht vereisen tijdens het bewegen, zoals polijsten.
Opmerking
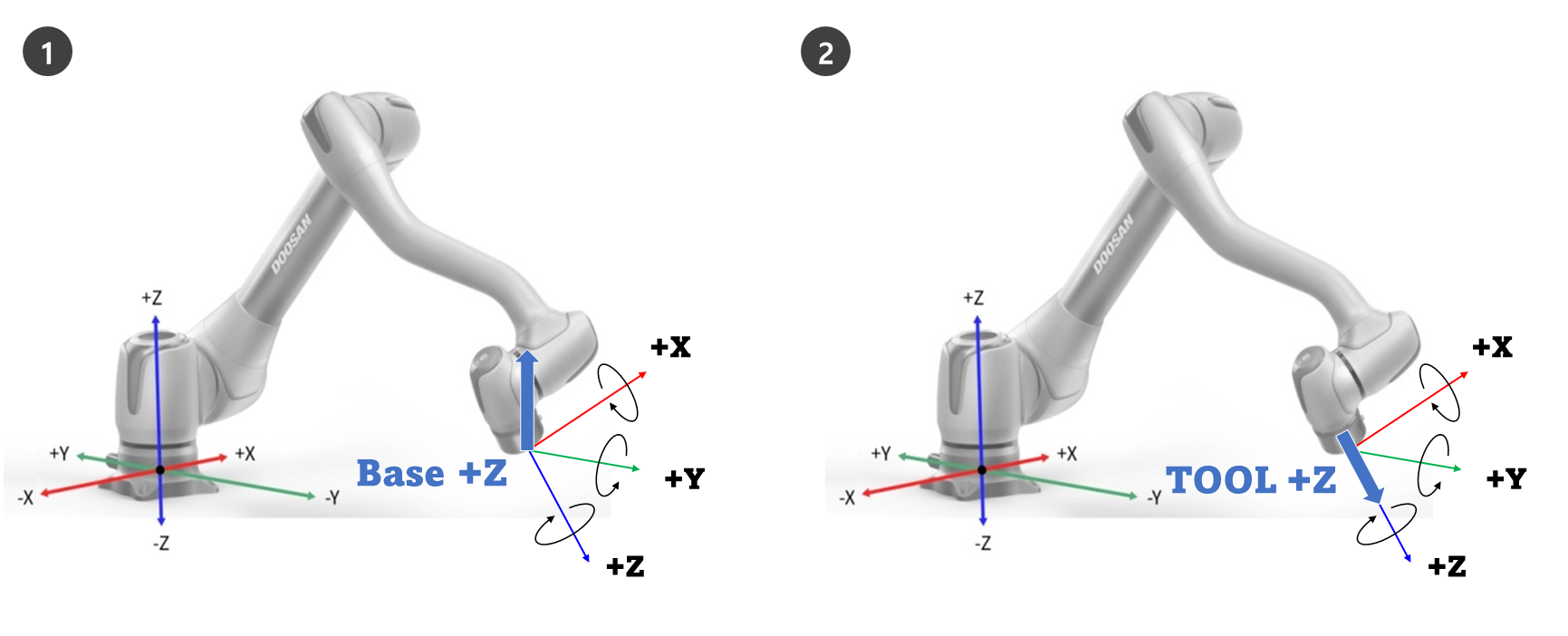
Compliance- en Force-opdrachten worden uitgevoerd op basis van de huidige coördinaten. De standaardcoördinaat van een taak is de basiscoördinaten, en de coördinaten kunnen worden gewijzigd met de opdracht Set.
- Afb. 1 is de bedrijfsrichting wanneer de controle op de naleving van kracht in de +Z-richting wordt toegepast op de basiscoördinaten.
- Afb. 2 is de bedrijfsrichting wanneer de kracht-/compliancecontrole in de +Z-richting wordt toegepast op de gereedschapscoördinaten.
Compliance-controle

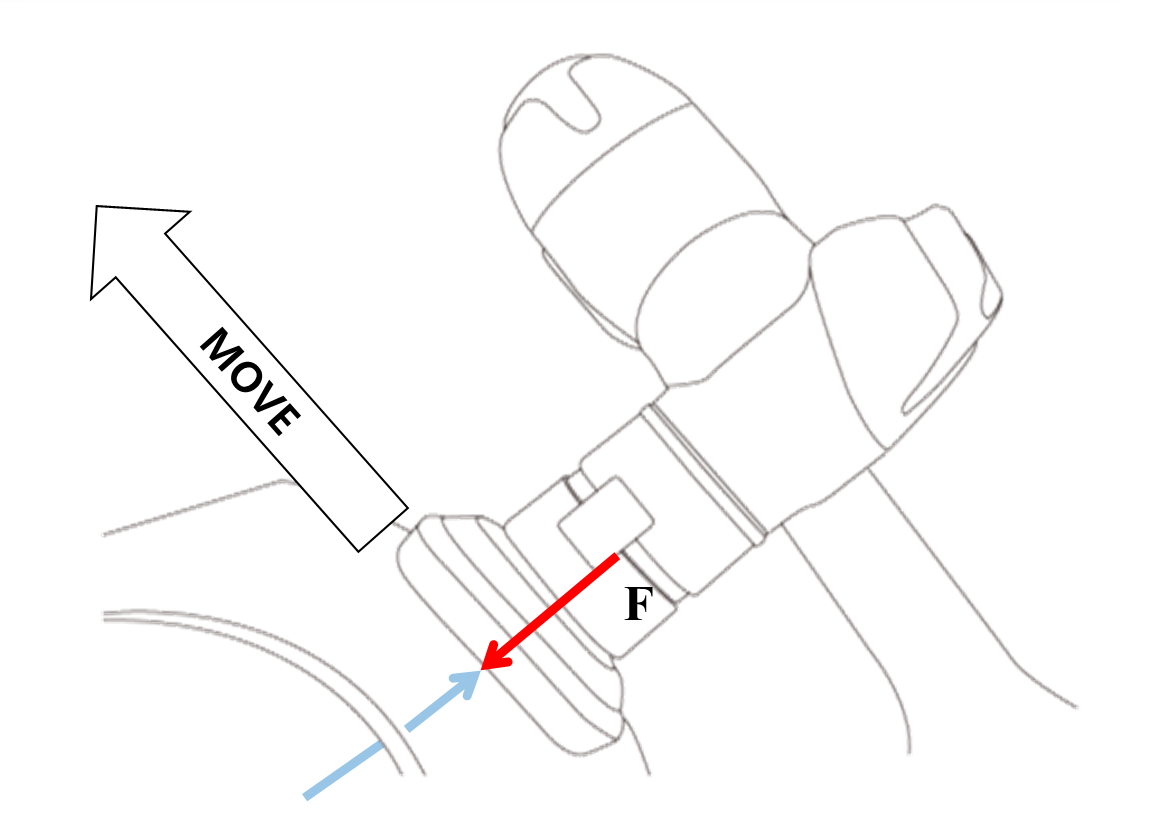
Compliancebeheer is de functie die voldoet aan externe kracht volgens de ingestelde stijfheid wanneer er kracht wordt uitgeoefend op het TCP-uiteinde van de robot. Het balanceert de krachten op het doelpunt, en het is een controlemethode die afweerkracht genereert als de verplaatsing zich buiten het balanceerpunt voordoet. Tijdens de compliancecontrole stuitert het robotuiteinde als een veer.
- Als er een botsing plaatsvindt wanneer de bewegingscontrole alleen wordt gebruikt, kan het voorwerp dat in botsing komt beschadigd raken.
- Doosan Robotics-robots stoppen veilig wanneer een botsing plaatsvindt, maar afhankelijk van de gebruikersinstelling, zoalsVeiligheidslimieten > botsingsgevoeligheid, kunnen de volgende situaties zich voordoen.
- Als de compliancebesturing tijdens de bewegingscontrole op aan staat, beweegt de robot zich terwijl hij zich houdt aan het object dat in botsing komt.
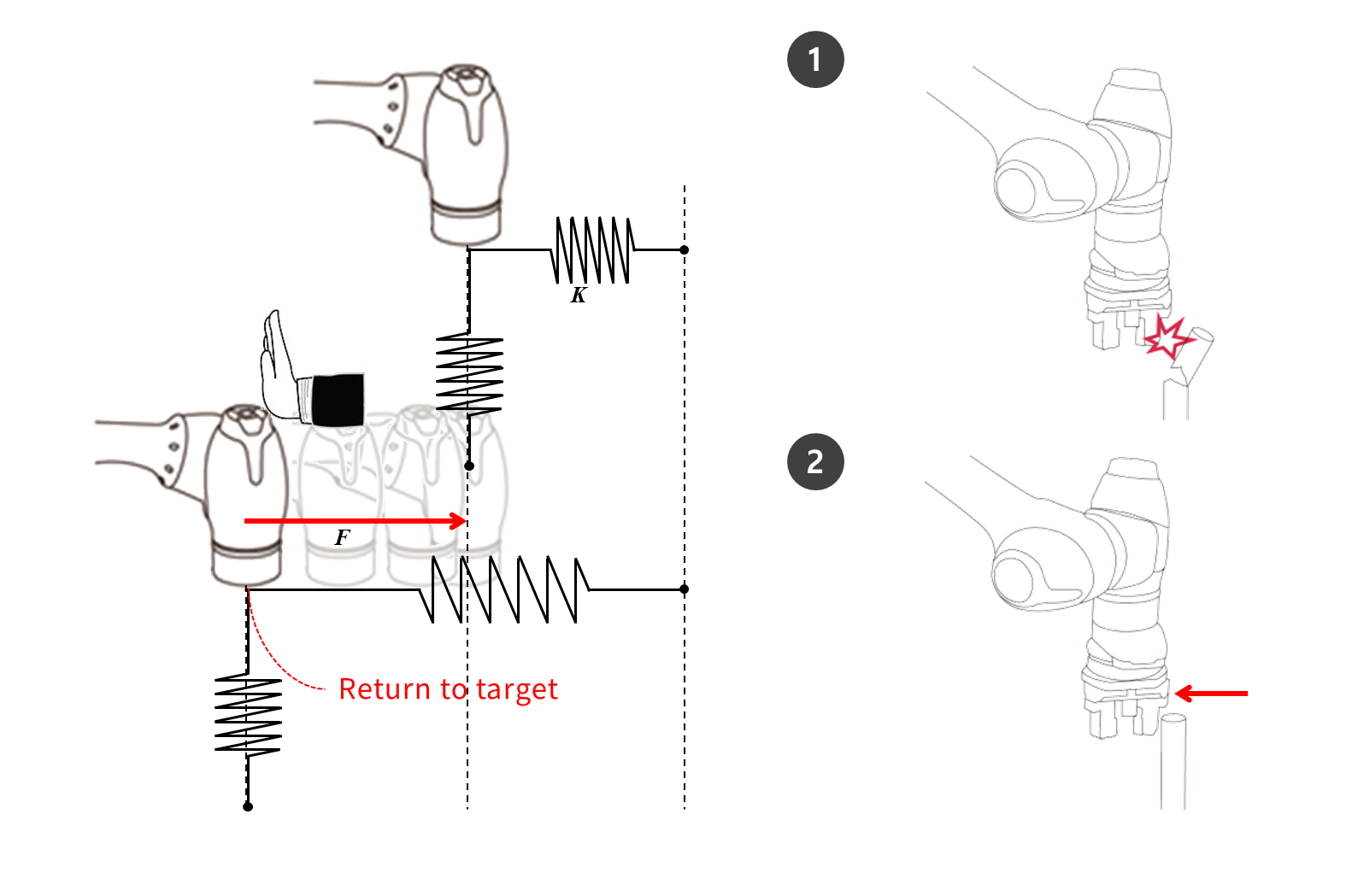
Als F externe kracht is, K stijfheid is en X afstand, zijn de volgende formules waar.
- F = K * X
- K = F / X
- X = F / K
Op basis van de bovenstaande formules is de externe kracht die wordt gegenereerd 1N als de stijfheid van de compliancecontrole is ingesteld op 1000N/m en als de robot 1 mm beweegt.
- F=1000 N/m*0.001 m=1 N (0.001 m=1 mm)
Opmerking
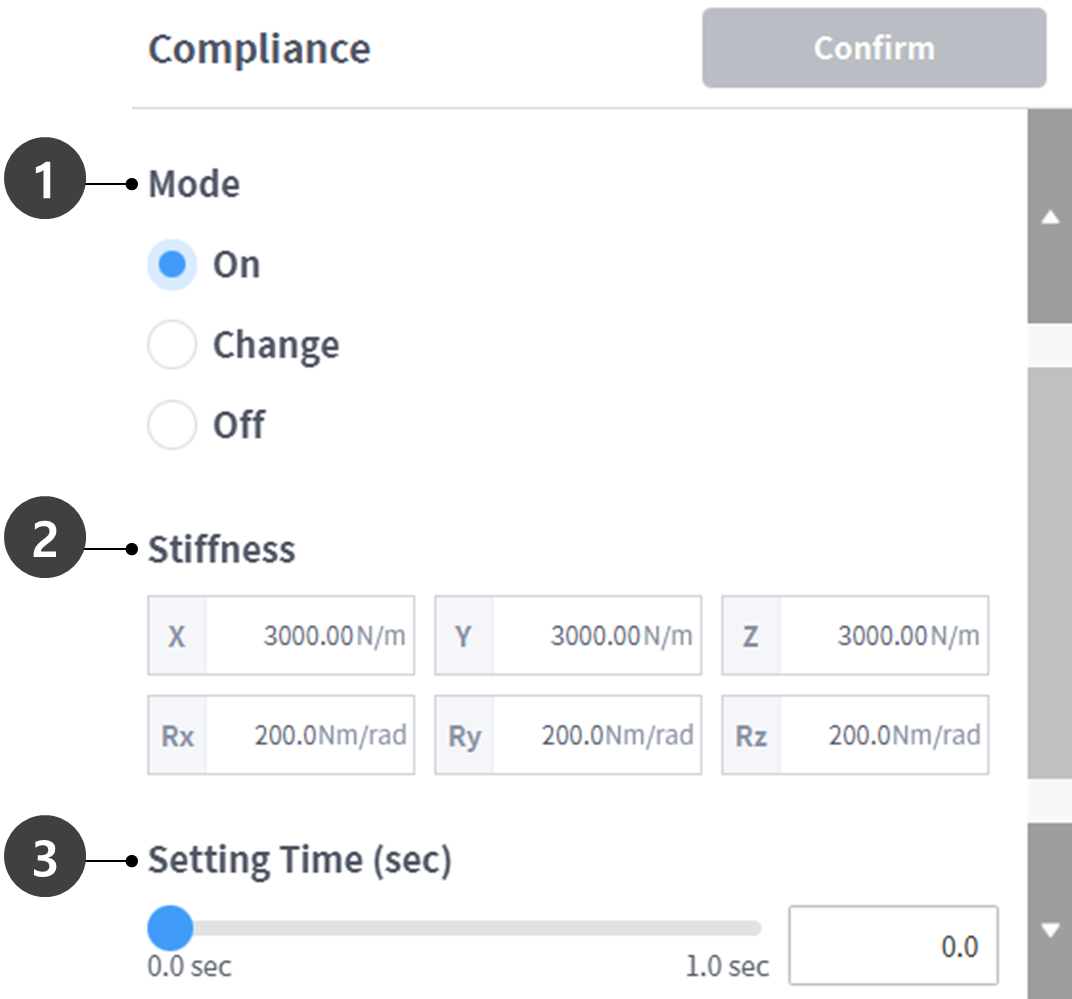
Op de opdracht Property of Compliance kunnen de volgende waarden worden ingesteld:
- Modus
- Aan: Maakt compliance-controle mogelijk
- Wijzigen: Als de compliancemodus is ingesteld op aan, verandert deze in stijfheid
- Uit: Hiermee schakelt u compliance-controle uit
- Stijfheid
- M/H Series : Translation(0~20000N/m), Rotation(0~1000Nm/rad)
- A Series : Translation(0~10000N/m), Rotation(0~300Nm/rad)
- Lagere stijfheidswaarden zullen milder reageren op externe kracht en zullen meer tijd vergen om terug te keren naar het doelpunt
- Tijd instellen
- Dit is de tijd die nodig is om de huidige stijfheidswaarde te bereiken om de ingestelde stijfheidswaarde (0-1s) te bereiken
Let op.
- Het gewicht van het gereedschap en het TCP (Tool Center Point) moeten nauwkeurig worden ingesteld. Een onnauwkeurig gereedschapsgewicht kan ertoe leiden dat de robot het gereedschapsgewicht als externe kracht detecteert, en als u de Compliance Command inschakelt, wordt er een positiefout gegenereerd.
- De spanning van de kledingverpakking kan een extern koppel op de robot genereren. Wees daarom voorzichtig bij het installeren van het kledingpakket.
- Compliance kan niet worden in- of uitgeschakeld terwijl asynchrone beweging of blending-beweging wordt uitgevoerd.
- Tijdens de Compliance Command On is alleen lineaire beweging toegestaan. Gezamenlijke bewegingen, zoals MoveJ en MoveSJ, zijn niet toegestaan.
- Tijdens de opdracht Compliance aan kan het gewicht van het gereedschap of TCP niet worden gewijzigd.
- Tijdens de Compliance Command On is het mogelijk om het doelpunt niet nauwkeurig te bereiken als gevolg van de conformiteit van het koppel dat wordt gegenereerd tijdens het uitvoeren van de beweging. Het wordt daarom aanbevolen om compliance control in te schakelen in de buurt van het doelpunt. Of het is mogelijk om positiefouten te minimaliseren door een grote stijfheidswaarde in te stellen.
Krachtregeling

Force Control is een functie die kracht uitoefent in de richting van de krachtbeheersing totdat de ingestelde kracht en de afstotende kracht een evenwicht vormen
- Hij beweegt de robot in de ingestelde krachtrichting, en als er contact met een object wordt gemaakt, handhaaft hij de ingevoerde kracht (N)
- Het is in staat bewegingscontrole uit te oefenen in een richting die afwijkt van de krachtrichting, terwijl er een constante kracht wordt uitgeoefend
- De minimuminstelling is +/- 10N en kan worden verfijnd met een resolutie van 0,2N
- Force Control is niet beschikbaar in de singularity-zone
- In het algemeen wordt Compliance Control gebruikt in combinatie met force control, zodat force control voldoet aan externe kracht
Opmerking
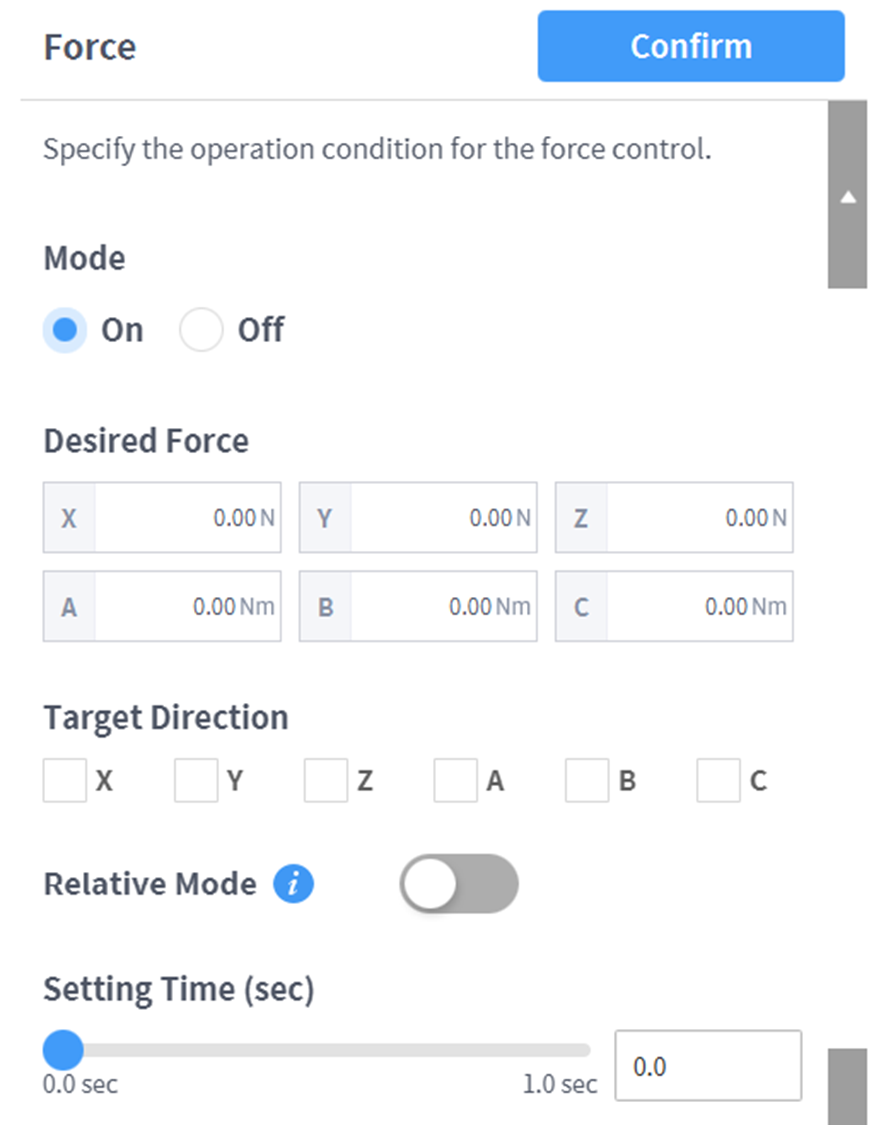
Vanuit de eigenschap Force Command kunnen de volgende waarden worden ingesteld.
- Modus
- Aan: Schakelt Force Control in
- Uit: Schakelt Force Control uit
- Gewenst krachtbereik
- X, Y, Z: 10 - (het maximum van elke robot) N
- A, B, C: 5 - (het maximum van elke robot) Nm
- Zie voor meer informatie over de maximale kracht Bereik boven-/ondergrenzen en standaardwaarde van veiligheidsparameters.
- Doelrichting
- Deze gaat naar de geselecteerde doelwaarde van elke richting.
- Er kunnen meerdere selecties worden gemaakt.
- Krachtregeling kan alleen worden uitgevoerd met richtingsinstelling na krachtinstelling.
- Als een van de meerdere geselecteerde richtingen de doelkracht bereikt, blijft deze bewegen totdat de doelwaarde voor de andere richting is bereikt.
- Relatieve modus
- Als deze modus is ingeschakeld, wordt de externe kracht die op de robot wordt uitgeoefend, gekalibreerd op 0 om de nauwkeurigheid van de krachtregeling te verbeteren.
- Als de relatieve modus is uitgeschakeld, is de werkelijke kracht die op het doel wordt toegepast gelijk aan de som van de ingestelde kracht en de externe kracht.
- Wanneer de relatieve modus is ingeschakeld, is de werkelijke kracht die op het doel wordt toegepast gelijk aan de ingestelde kracht.
- Tijdens de krachtbeheersing kan er een afwijking optreden, afhankelijk van de houding of de externe kracht.
- Tijdens de krachtcontrole is het mogelijk het exacte doelpunt niet te bereiken. Daarom wordt aanbevolen om de krachtregeling in te schakelen nabij het doelpunt.
- Als deze modus is ingeschakeld, wordt de externe kracht die op de robot wordt uitgeoefend, gekalibreerd op 0 om de nauwkeurigheid van de krachtregeling te verbeteren.
- Tijd instellen
- Dit is de tijd die de huidige krachtwaarde nodig heeft om de ingestelde krachtwaarde (0-1s) te bereiken