
Meetposes en -omstandigheden
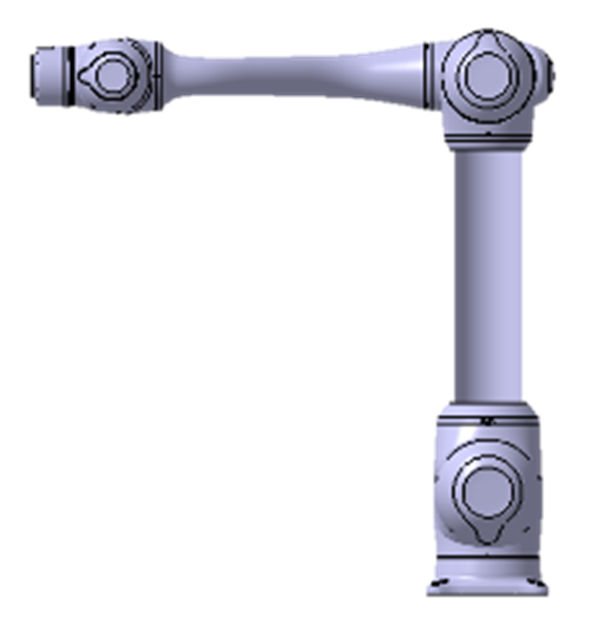
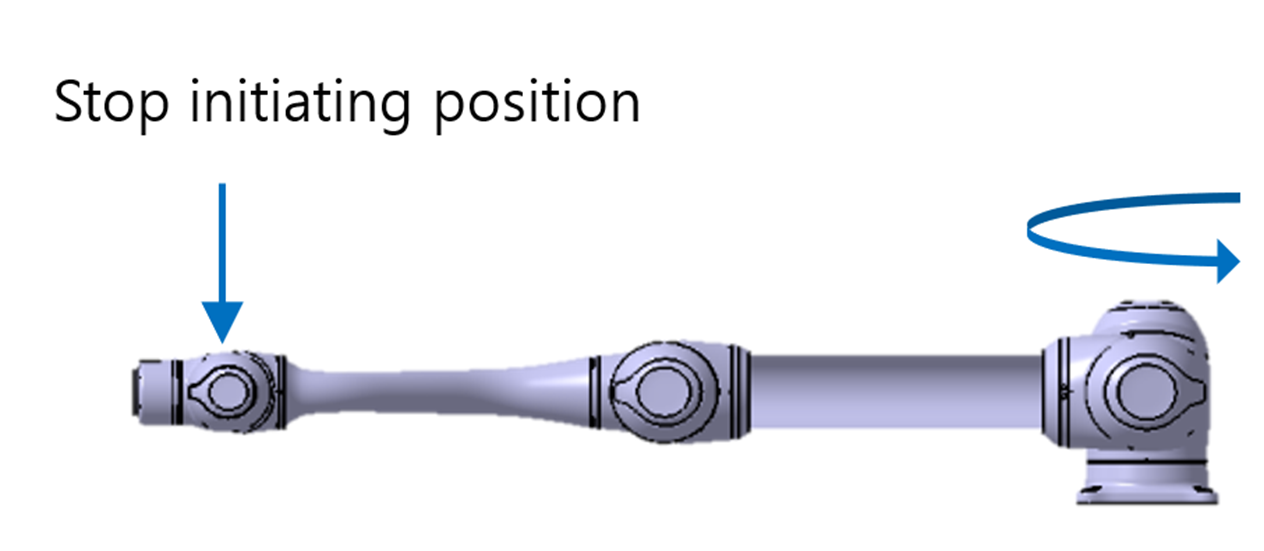
De meting van gewricht 1 wordt uitgevoerd met de roterende as loodrecht op de grond en tijdens horizontale beweging.
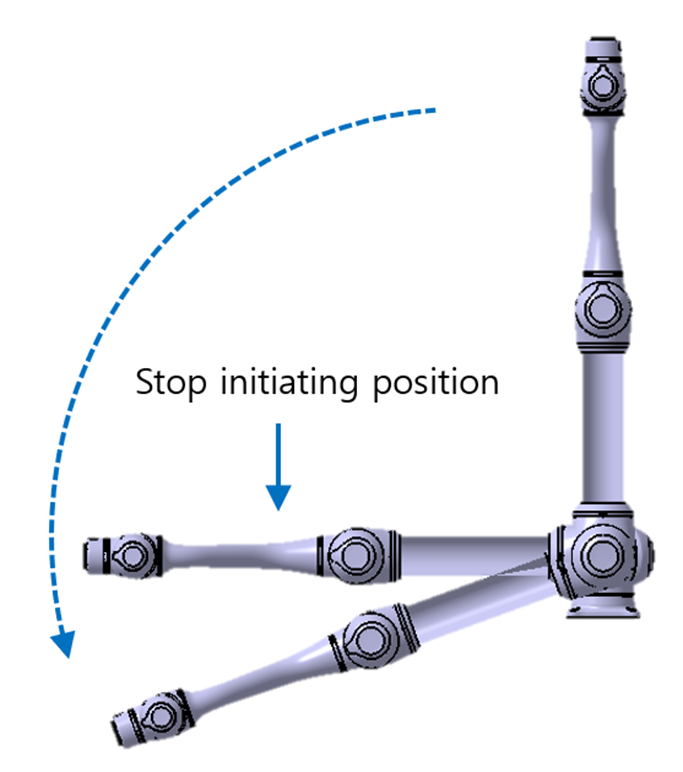
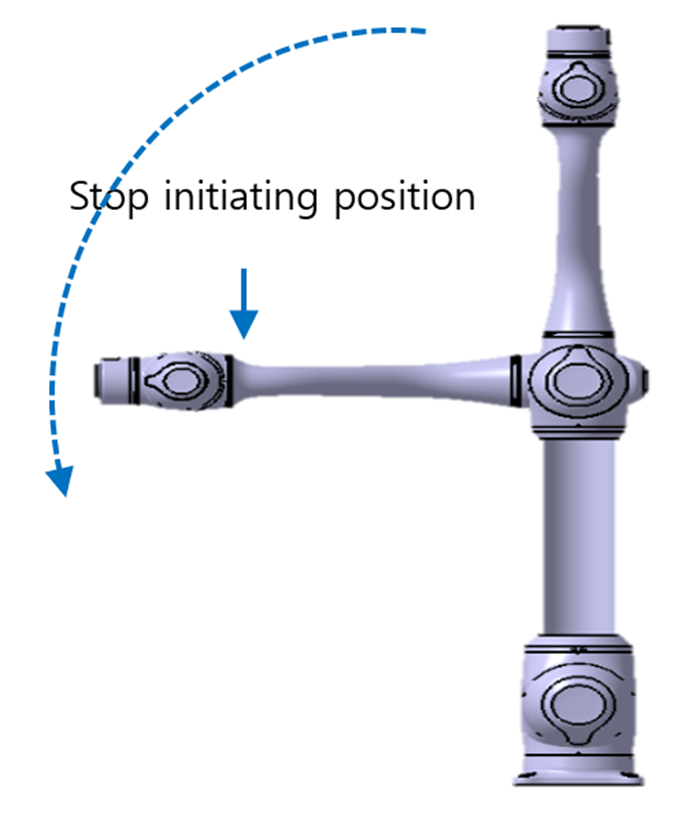
De metingen aan de gewrichten 2 en 3 worden uitgevoerd met de roterende as parallel aan de grond en wanneer de robot in een neerwaartse beweging verticaal ten opzichte van de grond wordt gestopt.
Opmerking
De metingen gaan uit van het slechtste geval. De meting kan variëren afhankelijk van de omstandigheden
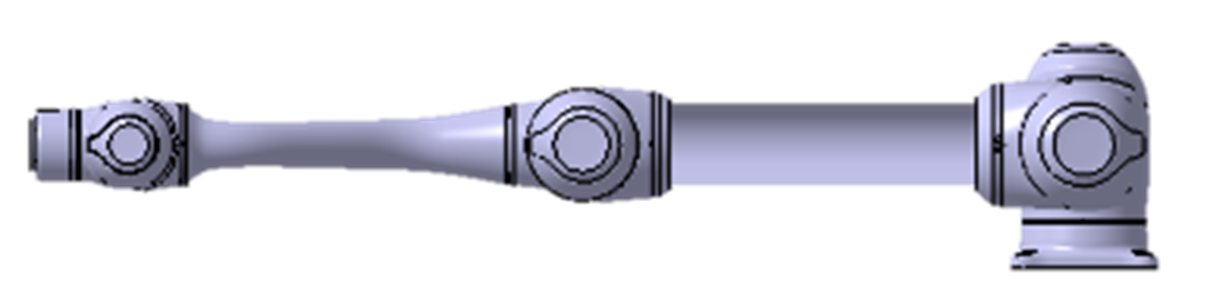
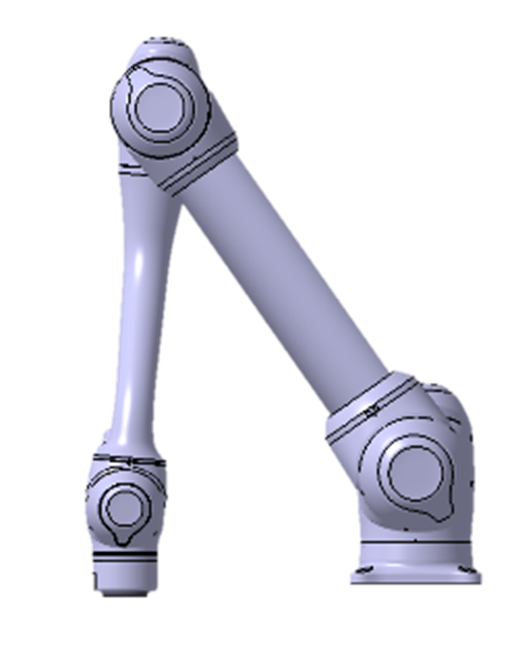
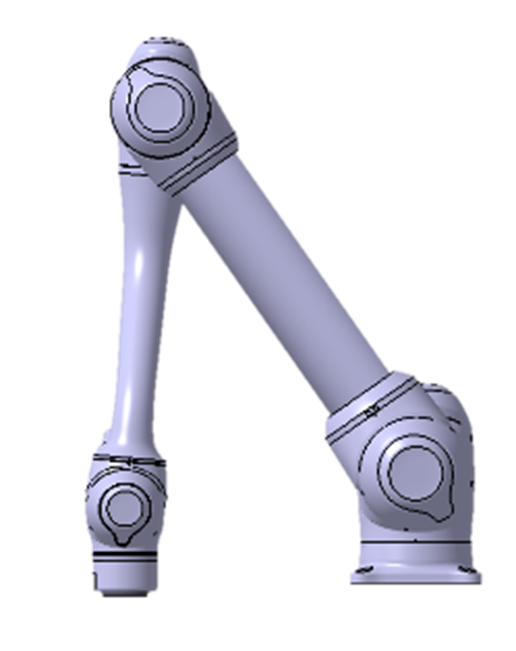
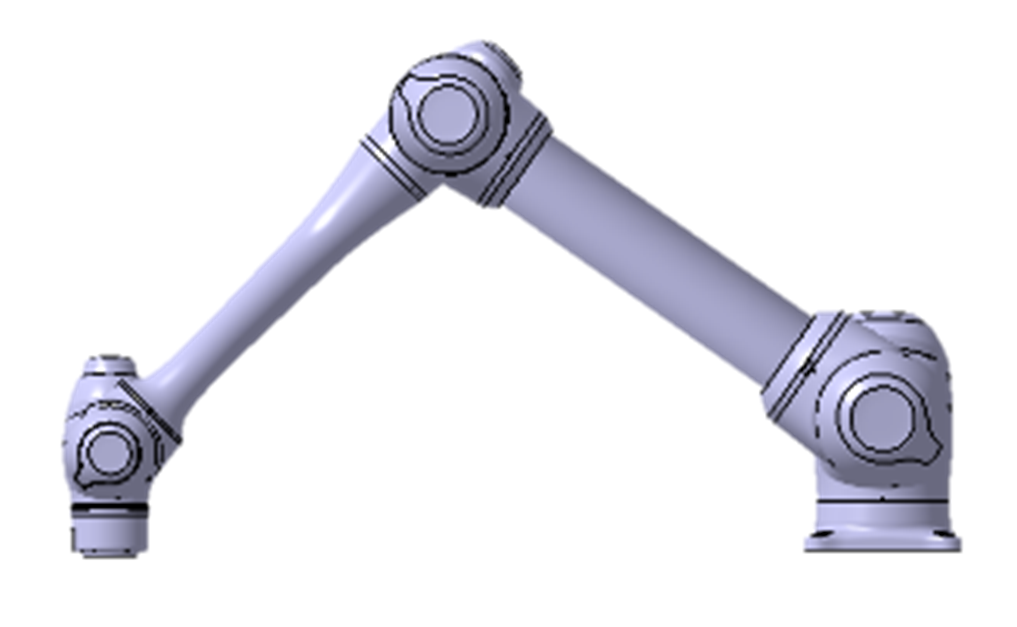
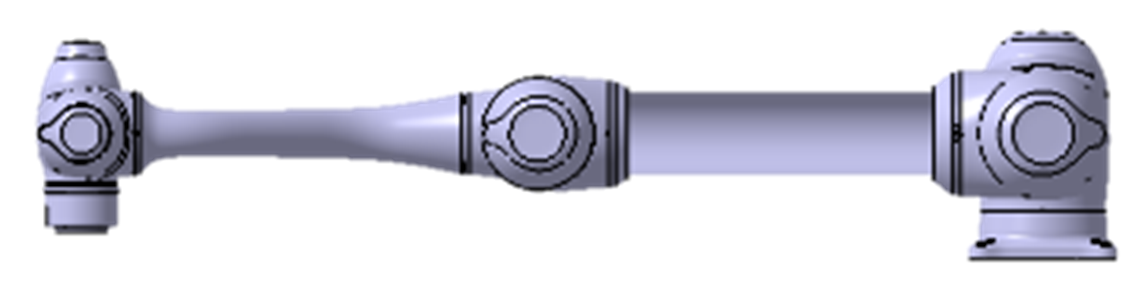
De positie bij een verlenging van 33%, 66% en 100%
| Gewricht 1 | Gewricht 2 | Gewricht 3 |
100% verlengd Stopcategorie 0 |
 |
 |
 |
33% verlengd Stopcategorie 1 |
 |
 |
- |
66% verlengd Stopcategorie 1 |
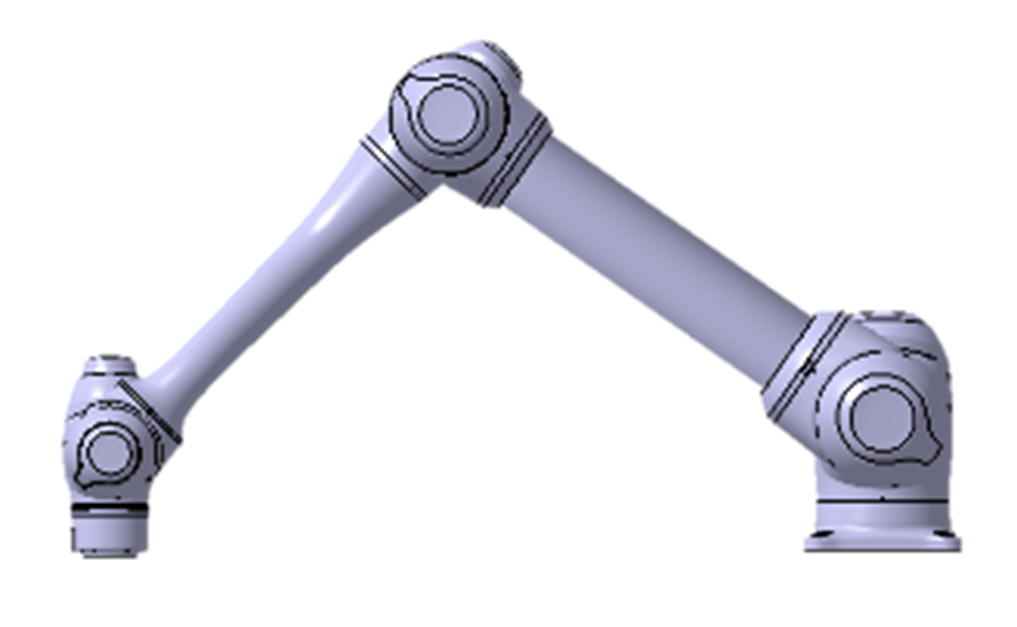 |
 |
- |
100% verlengd Stopcategorie 1 |
 |
 |
 |
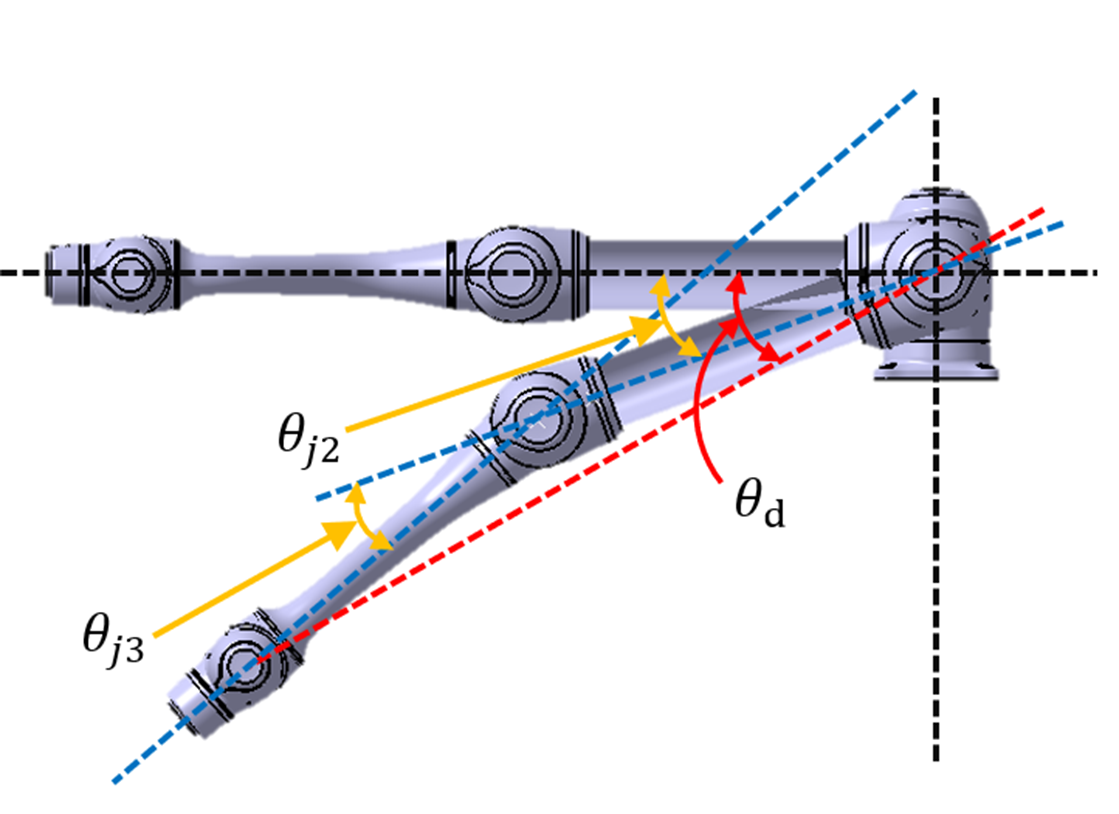
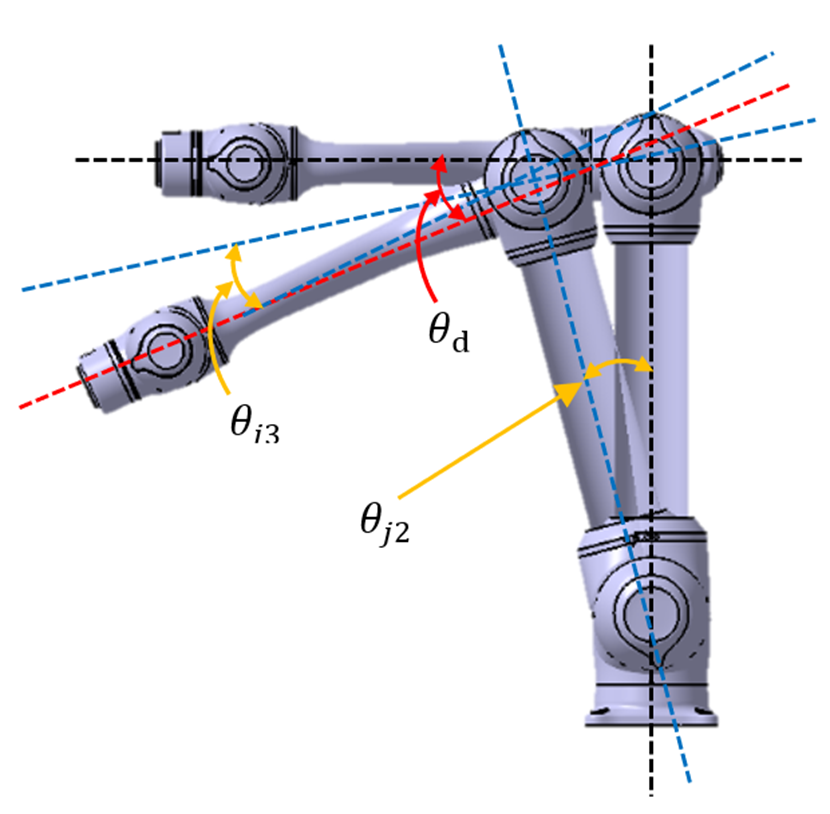
De positie wanneer de stop is geactiveerd en de gemeten hoek (θd)
Positie wanneer de stop is geactiveerd | Gemeten hoek | |
Gewricht1 |
 | Geen uitschieter,
|
Gewricht2 |
 |
 |
Gewricht3 |
 |
 |