
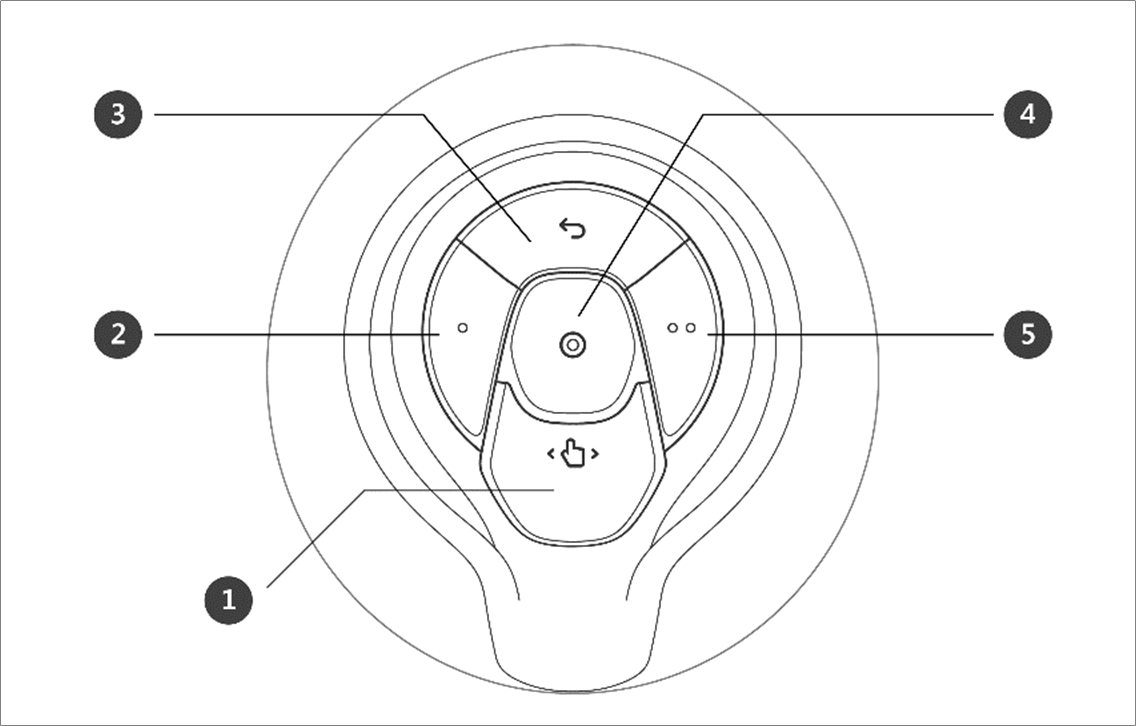
Cockpitknop (vijf knoppen)
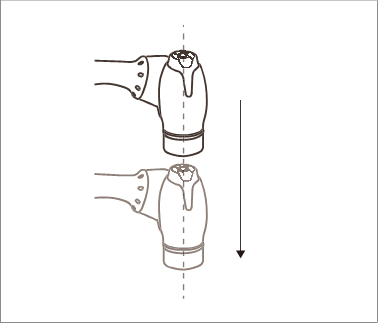
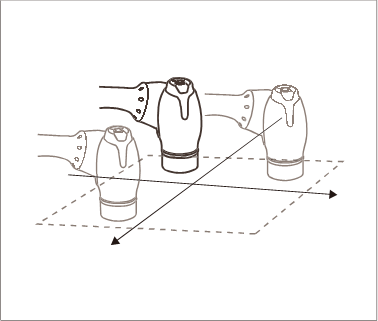
De gebruiker kan de robotpose wijzigen terwijl hij de knop Handgeleiding of aangepaste knop op de cockpit ingedrukt houdt.
No. | Item | Omschrijving |
|---|---|---|
1 | Hand-Guiding Button | Deze knop wordt gebruikt om de pose van de robot aan te passen of te veranderen. |
2,5 | Knop Gebruikersinstellingen (Beperkte beweging) | Deze knop kan de robotpose wijzigen door een pose in te voeren die overeenkomt met een vergrendelvoorwaarde die overeenkomt met een modus.
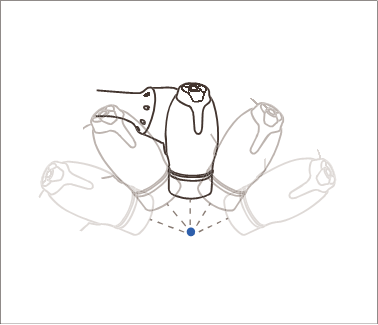
 Meer informatie over instellingen vindt u in Cockpit-instellingen. |
3 | Cancel Button | Verwijdert de laatst opgeslagen pose. |
4 | Save Pose Button | Slaat de huidige pose op. Voor meer informatie, zie Werkpunt van skill-opdracht instellen met cockpitknoppen. |
Let op
Modellen uit de A-serie zonder FTS (A0509, A0912) kunnen de knop Gebruikersinstellingen (Beperkte beweging) niet gebruiken.
Modellen uit de A-serie met FTS (A0509S, A0912S) kunnen gebruikmaken van de knop Gebruikersinstellingen (Beperkte beweging).
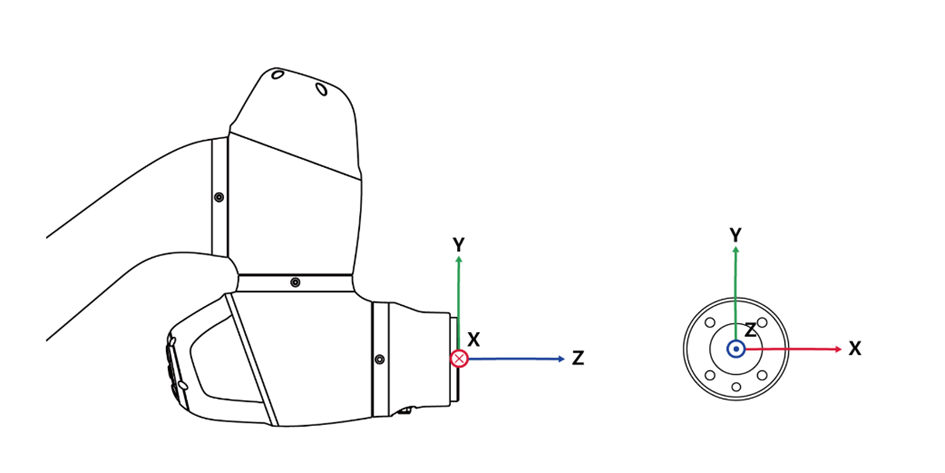
Vaste beweging vertrouwt op het aan de punt van de robot bevestigde FTS; daarom is het van essentieel belang dat het gereedschap wordt bevestigd en dat de robot het vastgrijpt terwijl hij beweegt. Bij verplaatsing van de robot terwijl de body wordt vastgehouden, kan het voorkomen dat er geen reactie van de robot wordt geactiveerd.
Voor meer informatie over de functionele beperkingen van elke robotserie, raadpleegt u “Functionele beperkingen voor elke serie robots”.