
Uitvoeren op basis van wereldcoördinaten
Voer de onderstaande stappen uit om de robot te verplaatsen op basis van wereldcoördinaten:
- Selecteer het tabblad Taak in het scherm Jog.
- Selecteer de weergavecoördinaten die als Wereldcoördinaten moeten worden gebruikt en selecteer Wereld als referentiepunt van de taakcoördinaten.
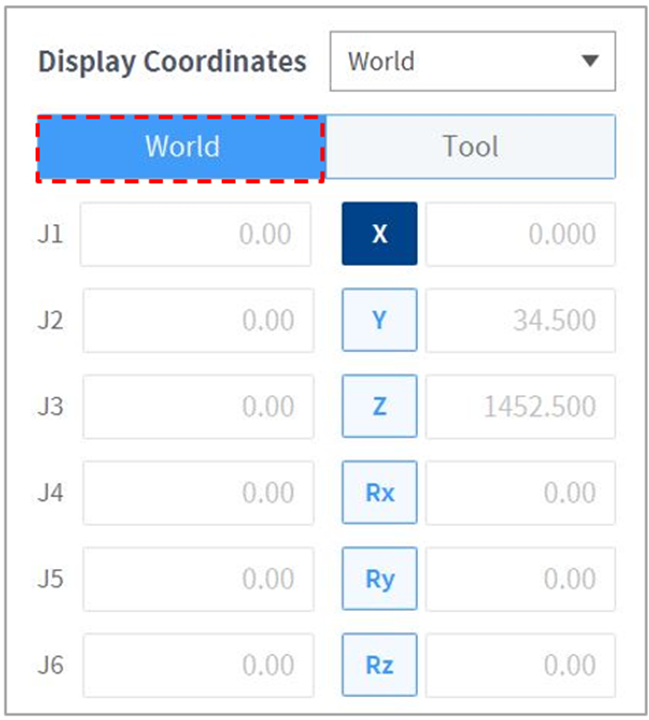
- Selecteer Wereldcoördinaten om te verplaatsen.
- Houd de richtingsknop (

