Systeem opstarten
Wanneer het systeem is ingeschakeld, wordt het opgestart. Wanneer het opstarten is voltooid, wordt de systeemtoepassing op de instructiependant weergegeven. Meer informatie over de systeemtoepassing vindt u in Configuratie programma scherm
In het geval van DART-Platform (voor Windows),
- Start het DART-platform geïnstalleerd op de desktop of laptop.
- Wacht ongeveer 5 minuten totdat de robotcontroller klaar is met opstarten.
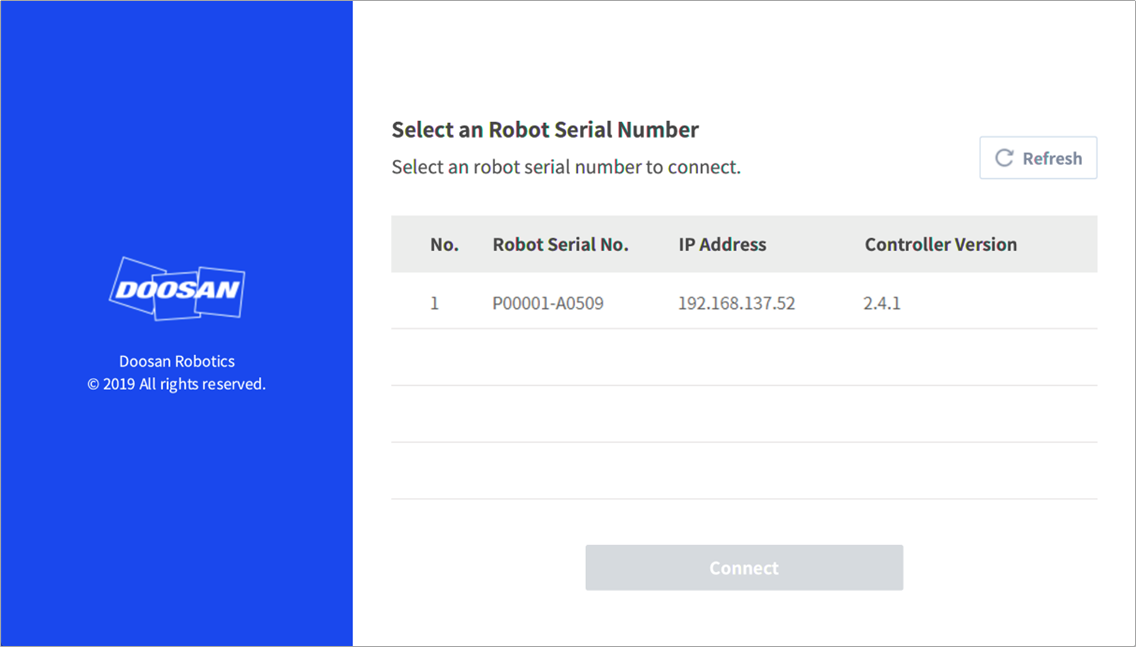
- Wanneer het IP-adres is gezocht, controleert u het serienummer van de aangesloten op het netwerk.
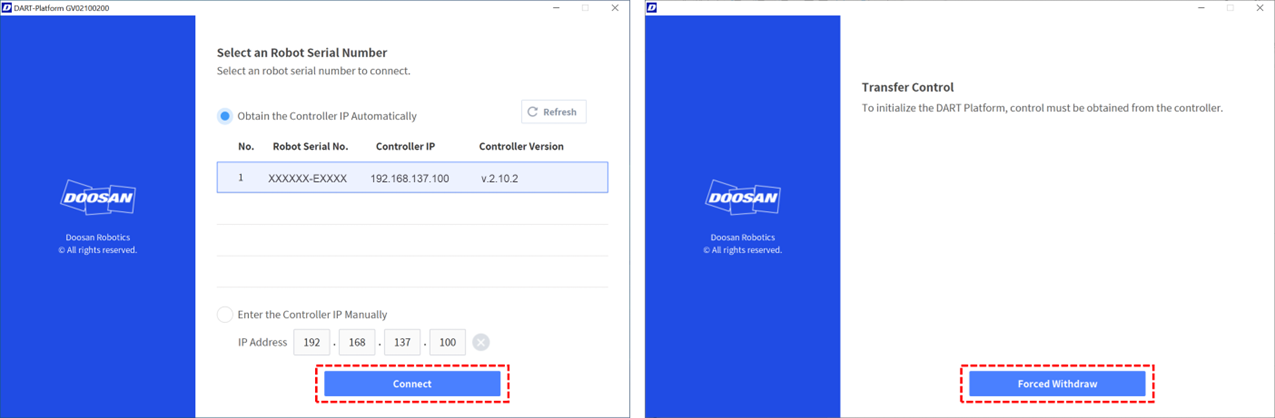
- Selecteer de robot die u wilt koppelen en klik op de knop 'Verbinden'.
- Druk op de Force Recall-knop om de besturing over te dragen.
Opmerking
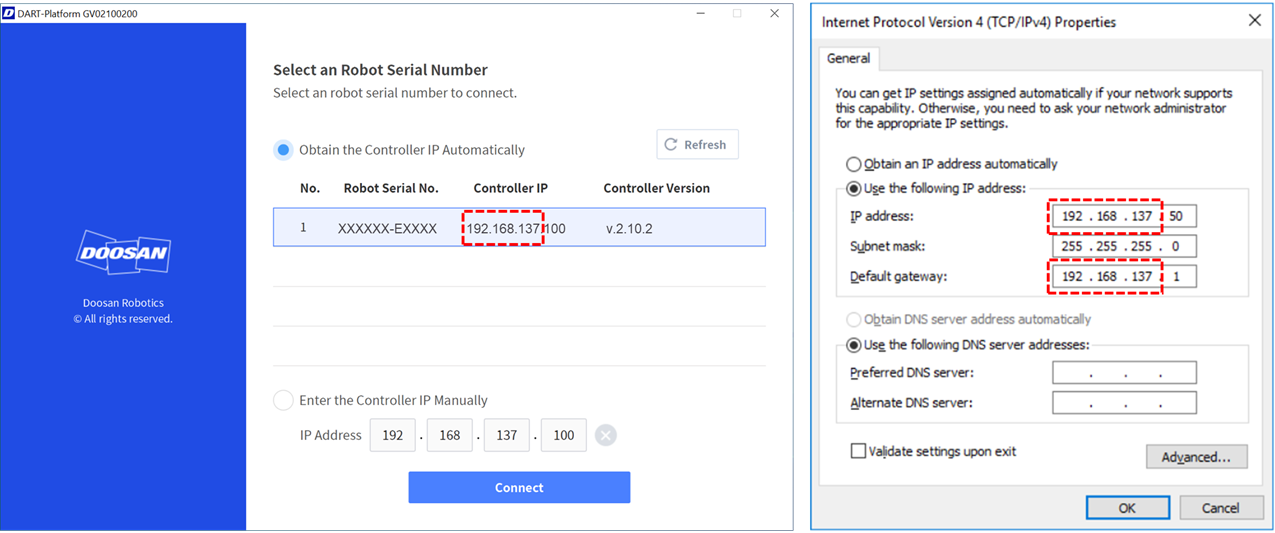
- Als er geen verbinding is tussen de controller en het DART-platform, wijzigt u de C-klasse band van het IP-adres en de standaardgateway van de desktop of laptop waarop het DART-platform is geïnstalleerd in de C-klasse band van het IP-adres van de controller en probeert u het opnieuw.Als er geen verbinding is tussen de controller en het DART-platform, wijzigt u de C-klasse band van het IP-adres en de standaardgateway van de desktop of laptop waarop het DART-platform is geïnstalleerd in de C-klasse band van het IP-adres van de controller en probeert u het opnieuw.
- Als het IP-adres niet wordt gezocht, selecteert u 'Voer het IP-adres van de controller handmatig in' en gaat u verder met de verbinding. Het standaard IP-adres van de controller is ingesteld op 192.168.137.100.
- Als de geforceerde terugtrekking van de controle blijft mislukken, controleer dan het volgende:
- Sluit het programma en start het opnieuw op.
- Zorg ervoor dat de noodstopknop(pen) niet is (zijn) ingedrukt.
- Als een of meer paren digitale ingangen van de controller zijn toegewezen aan het noodstop-/externe noodstop-/STO-signaal (actief laag) in de veiligheids-I/O-instelling, zorg er dan voor dat alle toegewezen signalen zijn gedeactiveerd ( Hoog).
- Controleer of de controller klaar is met opstarten.
- Controleer de robotstatus. In het geval van Remote Control, Recovery of Backdrive kan het draaien van het DART-platform mislukken.
Opmerking
- Servo aan: Om de robotpose te kunnen verplaatsen, moet de robot de status Servo aan hebben, waarbij voeding wordt geleverd aan gewrichten van de robot en de robot stand-by staat. Meer informatie over Servo aan vindt u in Servo aan
- Datum- en tijdinstelling: Omdat de datum en tijd die worden weergegeven in de instructiependant en de logboekberichten die in de robot worden opgeslagen, de datum- en tijdinstelling van het systeem volgen, moeten de datum en tijd worden geconfigureerd wanneer het systeem de eerste keer wordt opgestart. Informatie over hoe u de datum en tijd configureert vindt u in Datum en tijd instellen
- Met het DART Platform kunt u de robot bedienen zonder de instructiependant.
- Het DART Platform toont een scherm waarop u ziet dat de robot na het opstarten is aangesloten op het netwerk en hoe het serienummer van de robot wordt gecontroleerd en de aansluiting van de robot plaatsvindt.