Probeer voorbeelden van complianceopdrachten
OPTIONEEL NORMAAL 20 MIN.
Dit voorbeeld wordt gemaakt in de Task Writer. Dit voorbeeld kan op vrijwel dezelfde manier worden geprobeerd in de Task Builder.
Let op.
Lees en volg voordat u het monster probeert (2.12-nl_NL) Voorzorgsmaatregelen voor gebruik. Zie voor meer informatie (2.12-nl_NL) DEEL 1. Veiligheidshandleiding.
Opmerking
- Als er een extern koppel boven de drempel is bij het in- of uitschakelen van de nalevingscontrole, stopt de robot het programma vanwege de JTS-fout (Joint Torque Sensor).
Threshold of JTS error (Nm) Model J1 J2 J3 J4 J5 J6 E0509 15 15 15 15 15 15 - De stijfheid kan worden gewijzigd, ongeacht de externe koppelgrootte.
- Tijdens compliancebeheer kunnen gezamenlijke bewegingen, zoals de opdracht MoveJ, niet worden uitgevoerd.
Stijfheid : Translation(0~10000N/m)
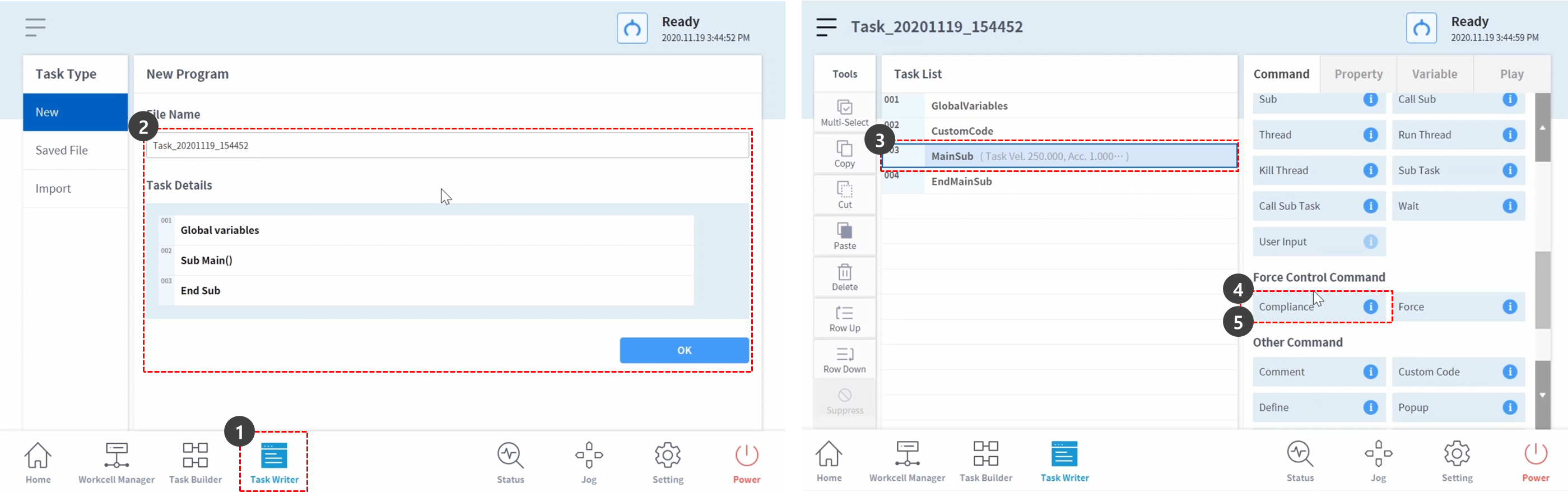
Selecteer Task Writer in het onderste menu.
Voer de naam van de taak in en druk op de knop OK.
Selecteer de opdracht MainSub op de derde regel van de takenlijst. Er wordt een nieuwe opdracht toegevoegd aan de volgende regel van de geselecteerde regel.
Opdracht Compliance toevoegen. Deze opdracht is gepland om te worden gebruikt voor het inschakelen van Compliance Control.
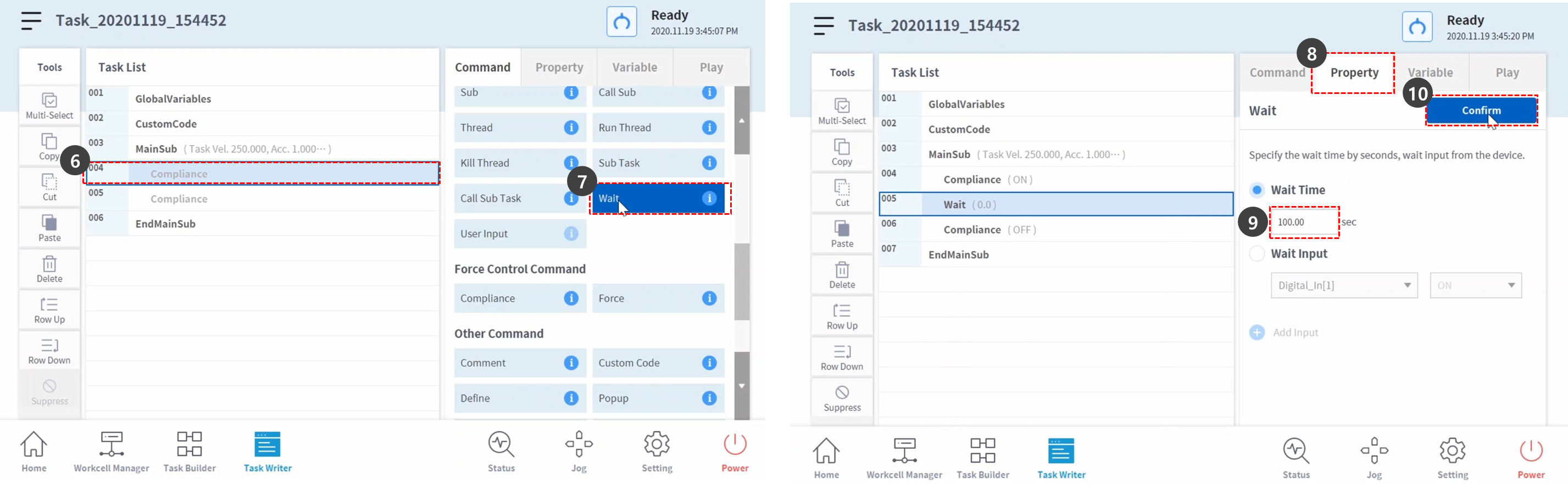
Voeg nog een compliancebeheer toe. Deze opdracht is gepland om te worden gebruikt voor het uitschakelen van Compliance Control.
Selecteer de opdracht Compliance op de vierde regel. Er wordt een nieuwe opdracht toegevoegd aan de volgende regel van de geselecteerde regel.
Wachtopdracht toevoegen.
Selecteer het tabblad eigenschap.
Stel de wachttijd als volgt in:
Wachttijd: 100 sec.
Druk op de bevestigingstoets.
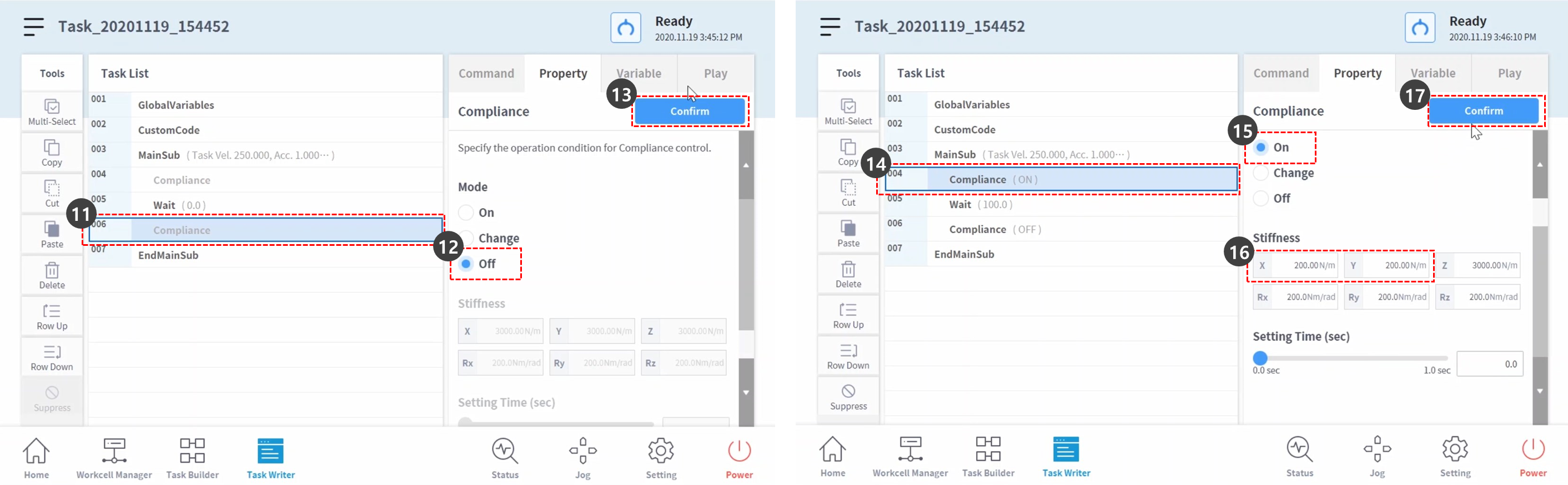
Selecteer de opdracht Compliance op de zesde regel.
Stel de modus in de eigenschap als volgt in: Modus uit schakelt compliancebeheer uit.
Modus: Uit
Druk op de bevestigingstoets.
Selecteer de opdracht Compliance op de vierde regel.
Stel de modus in de eigenschap als volgt in: Modus aan schakelt Compliance Control in.
Modus: Aan
Stel de stijfheid als volgt in: Verlaag de stijfheid van X- en Y-richting voor zachtere reacties in X- en Y-richting.
X: 200 Nm
Y: 200 Nm
Z: 3000 N/m (standaard)
RX, Ry, RZ: 200 Nm/rad (standaard)
Druk op de bevestigingstoets.
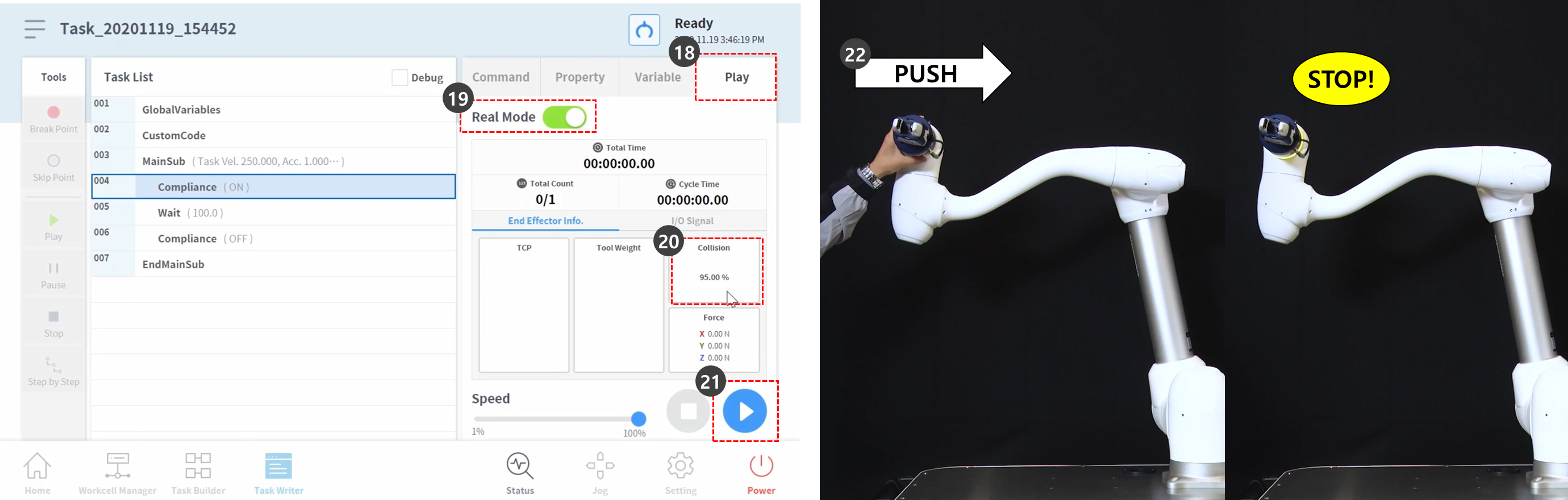
Selecteer het tabblad afspelen.
Schakel de schakelknop Real Mode in.
Zodra de schakelknop is geactiveerd, licht de knop groen op.
Dit voorbeeld activeert opzettelijk de veiligheidsstop om de reden uit te leggen voor het verlagen van de botsingsgevoeligheid tijdens de compliancecontrole. De botsingsgevoeligheid van dit monster is 95%. In gevallen met een dergelijke hoge botsingsgevoeligheid reageert de robot zeer gevoelig op botsingen.
Bij een botsing wordt de robot gestopt door de veiligheidsstop.
Druk op de knop afspelen.
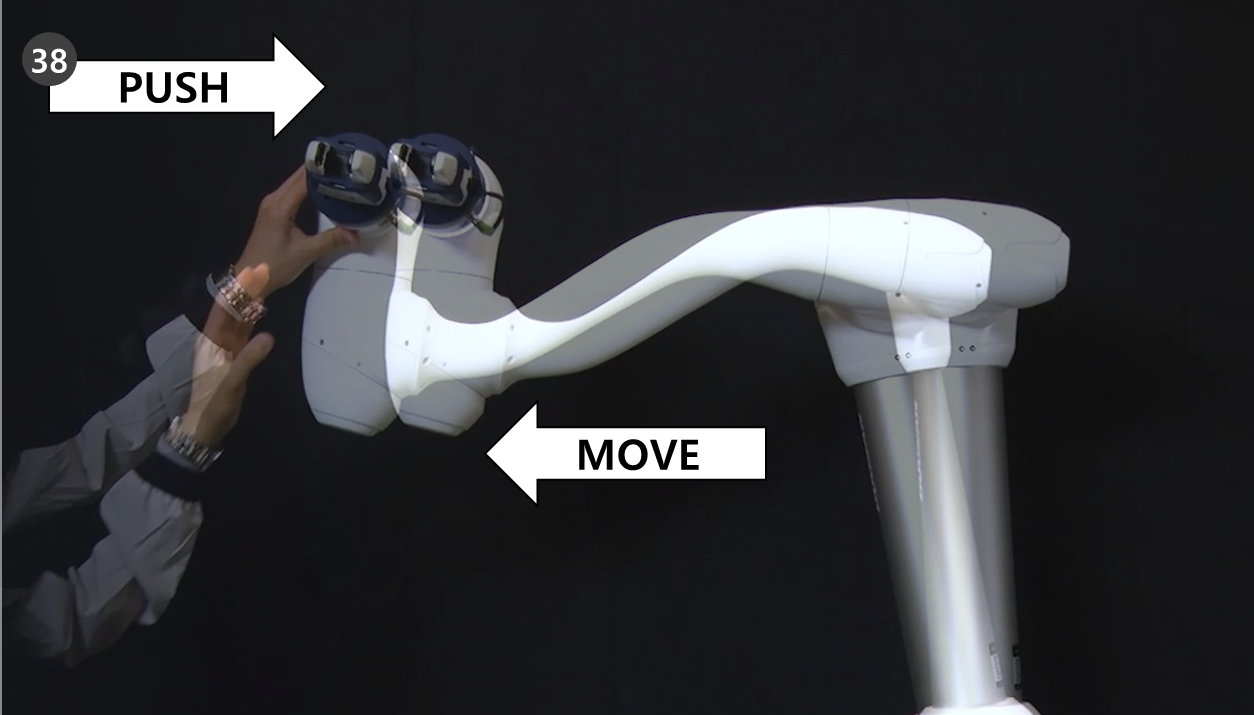
Houd het uiteinde van de robot vast en duw deze langzaam in de richting van de robot. De robot stopt als gevolg van een botsingsfout. Tijdens een noodstop als gevolg van een botsing licht de LED van de robot geel op.
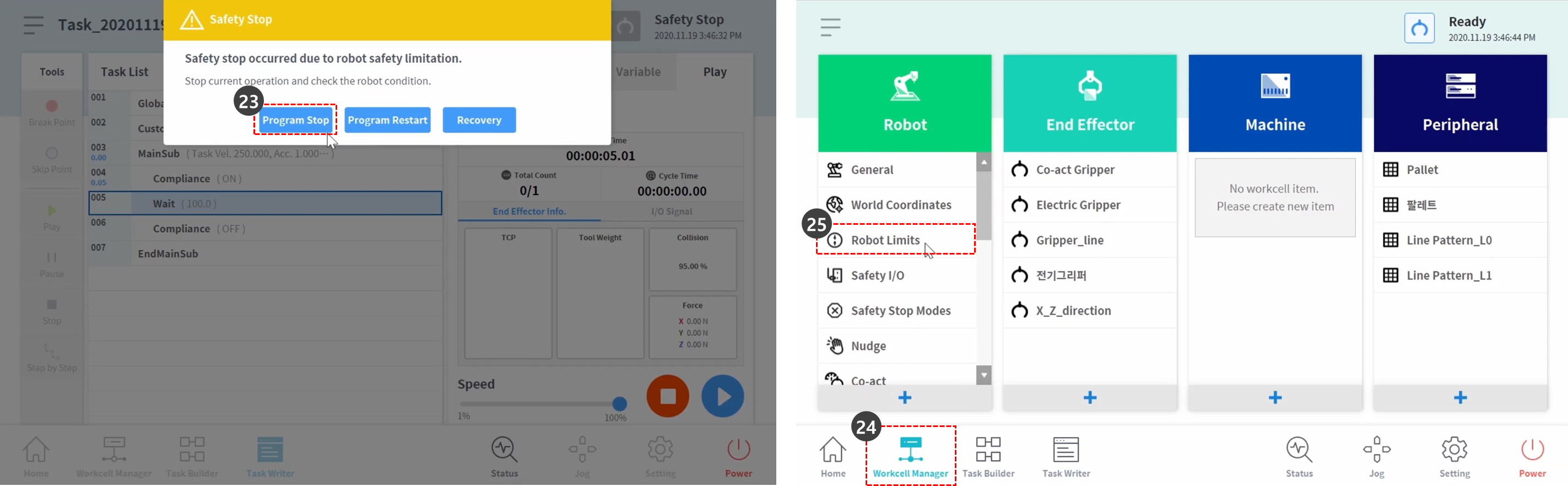
Druk op de Program Stop-knop in het gele waarschuwingsvenster voor de veiligheidsstop op het scherm. Het actieve taakprogramma wordt gestopt.
Selecteer de Workcell Manager in het onderste menu.
Selecteer Robot > Robotgrenzen.
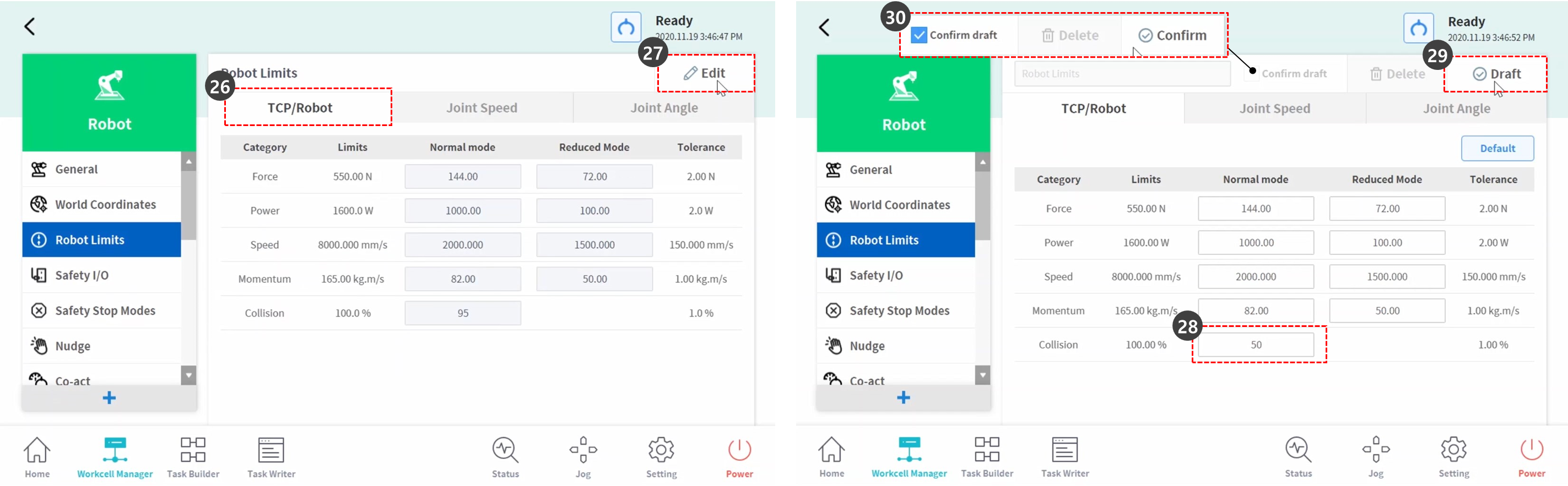
Selecteer het tabblad TCP/Robot.
Druk op de knop Bewerken.
Stel de botsingsgevoeligheid als volgt in:
Normale modus: 50 %
Druk op de knop Concept.
Schakel het selectievakje Concept bevestigen in en druk op de knop bevestigen.
Selecteer Task Writer in het onderste menu.
Selecteer het opgeslagen bestand op het scherm links.
Controleer of de naam van het eerste taakbestand de taaknaam is in stap 2 voordat u selecteert. De laatst opgeslagen taak bevindt zich boven aan de bestandslijst van Task Writer.
Druk op de knop openen.
Selecteer het tabblad afspelen.
Schakel de schakelknop Real Mode in.
Druk op de knop afspelen.
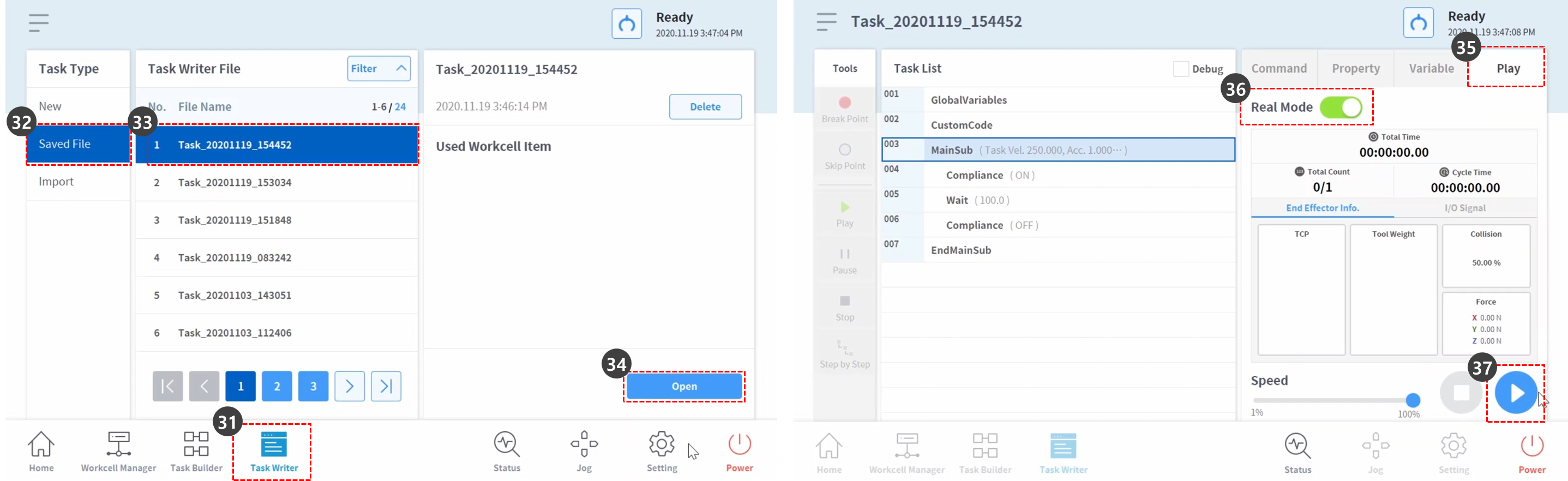
Houd het uiteinde van de robot vast en duw deze langzaam in de richting van de robot. De robot beweegt als gevolg van de duwkracht en keert terug naar zijn oorspronkelijke positie.