Inleiding product (CS-06)
Benamingen en functies
DC-controller (CS-06)
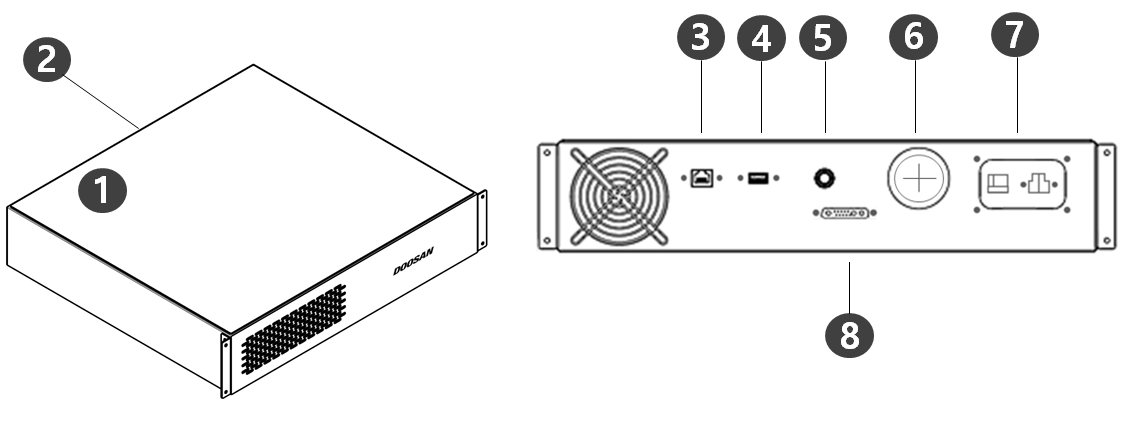
Nr. | Item | Omschrijving |
1 | I/O connection terminal (internal) | Verbinding met de besturingen van andere robots of nabijgelegen apparatuur is niet mogelijk. |
2 | Emergency stop button and Smart Pendant connection terminal | Wordt gebruikt om de noodstopknop of de kabel van de slimme pendant te verbinden met de controller. |
3 | Network connection terminal | Laptops, TCP/IP-apparatuur, Modbus-apparatuur en vision-sensoren kunnen worden aangesloten op de netwerkrouter in de regelaar. |
4 | USB connection terminal | Logboeken die tijdens de werking van de robot worden gegenereerd, kunnen worden opgeslagen op een USB-opslagapparaat, of taken kunnen worden geëxporteerd of geïmporteerd. |
5 | Emergency Stop Button Setting switch | Stel de schakelaar in volgens de werkelijke samenstelling om de slimme pendant of de noodstopknop te kunnen gebruiken. |
6 | Power connection terminal | Voorziet de controller van stroom. |
7 | Power switch | Schakelt de stroom naar de controller AAN/UIT. |
| 8 | Manipulator cable connection terminal | Verbindt de kabel van de manipulator met de controller. |
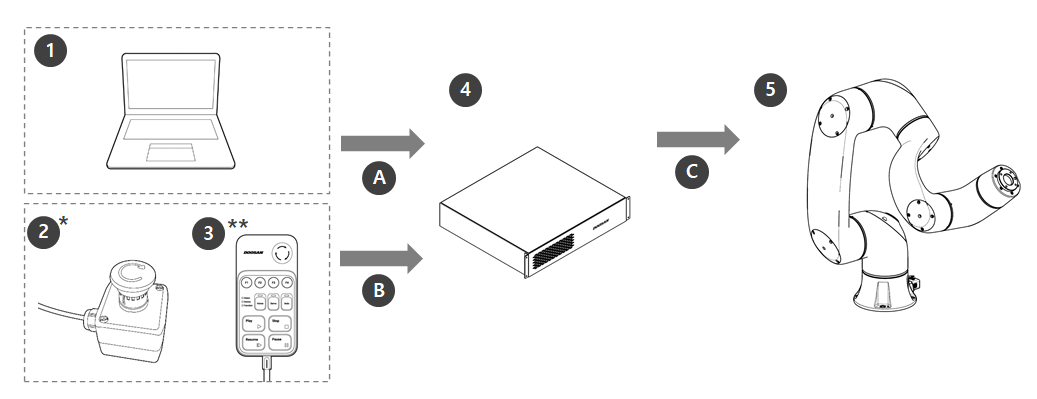
Systeemconfiguratie
| Nr. | Item | Omschrijving |
|---|---|---|
| 1 | Laptop | Na installatie van het DART Platform kan een werkomgeving worden ingesteld die gelijk is aan die van de instructiependant. De laptop wordt niet meegeleverd in de verpakking. Deze is noodzakelijk voor de installatie van het DART Platform. |
| 2 | Noodstopknop* | Als een laptop als onderdeel van het systeem wordt gebruikt, fungeert deze als de noodstopknop van de instructiependant. |
| 3 | Slimme pendant** | De robot kan eenvoudig worden bestuurd met een pendant die eenvoudige functies kan uitvoeren, zoals het in-/uitschakelen van de servo of het uitvoeren/afsluiten van vooraf ingestelde programma's. (Afzonderlijk en optioneel aan te schaffen) |
| 4 | Regelkaar* | Bestuurt de beweging van de robot aan de hand van de houding of de beweging die door de instructiependant is ingesteld. Hij beschikt over verschillende I/O-poorten die de aansluiting en het gebruik van verschillende uitrustingen en apparaten mogelijk maken. |
| 5 | Manipulator* | Een industriële collaboratieve robot die transport- of montagetaken kan uitvoeren met behulp van verschillende tools. |
| A | Opdracht/ monitoren | |
| B | Opdracht | |
| C | Voeding/ netwerk |
- Items zijn aangeduid als standaard items (*) en optionele items (**, afzonderlijk verkocht)
Naamplaatje en label