
Functie van Operator Intervention
Als er een probleem optreedt terwijl de robot werkt of een gebruiker een opdracht geeft, stopt de robot met werken en wordt er een pop-upbericht weergegeven waarmee de operator kan ingrijpen en de situatie kan oplossen. Nadat de gebruiker het probleem heeft opgelost, gaat de taak verder op de programmaregel waar het probleem is opgetreden.
Opmerking
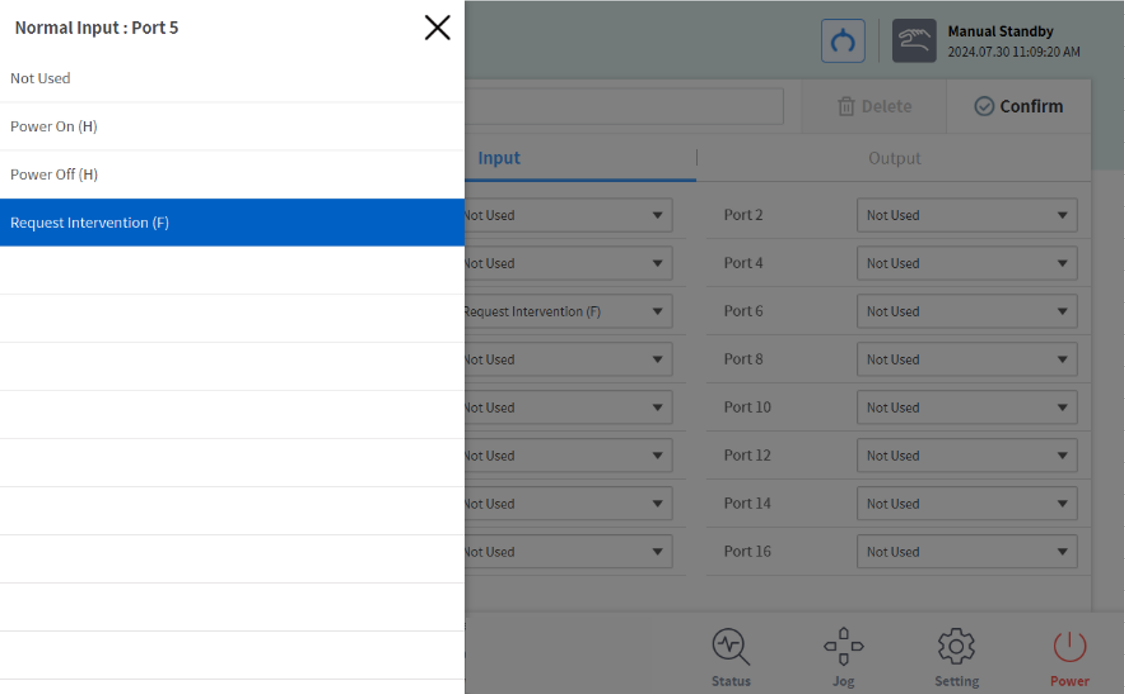
Om de functie voor interventie van de werknemer te gebruiken, moet u een van de onderstaande instellingen voltooien.
Workcell Manager - Normal I/O - Input - Request Intervention (F)
Workcell Manager - Peripheral - Ananlog Welding Machine - Welding Input Signal
(Raadpleeg de Welding Techinical Note voor gedetailleerde instellingen.)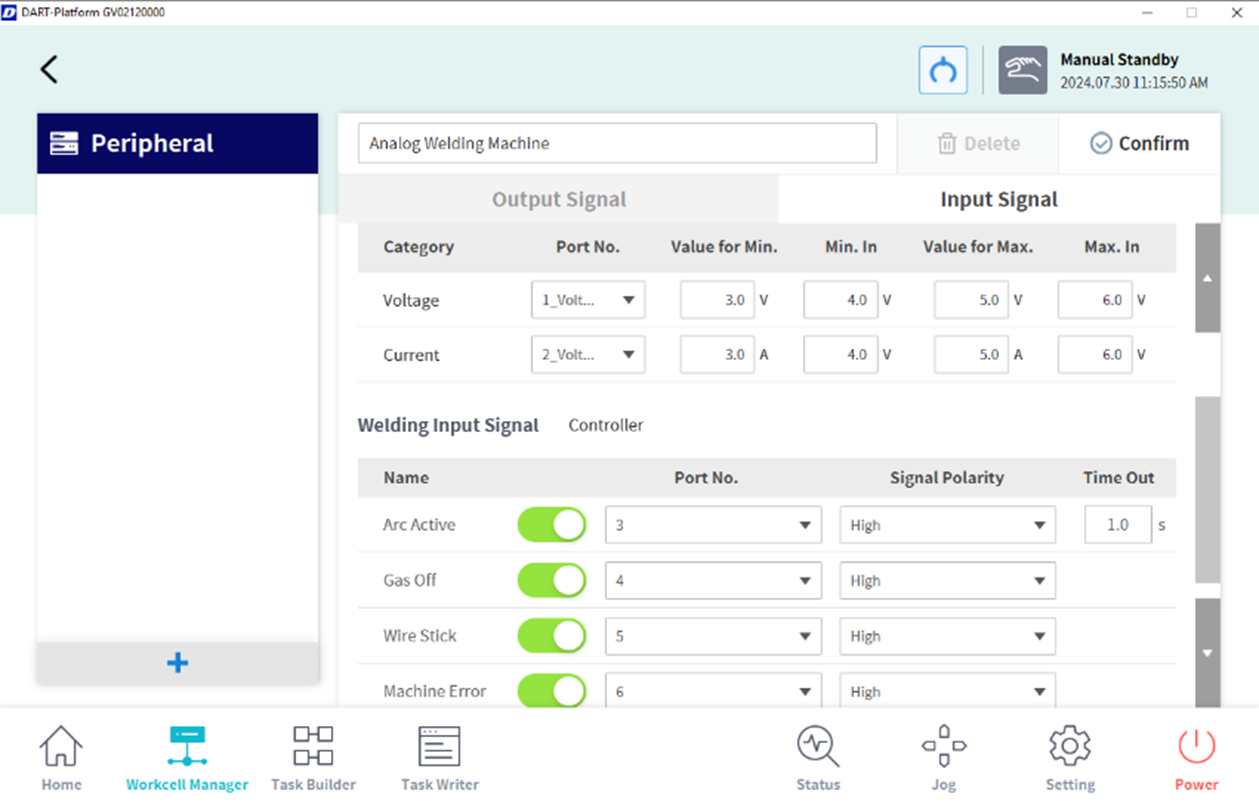
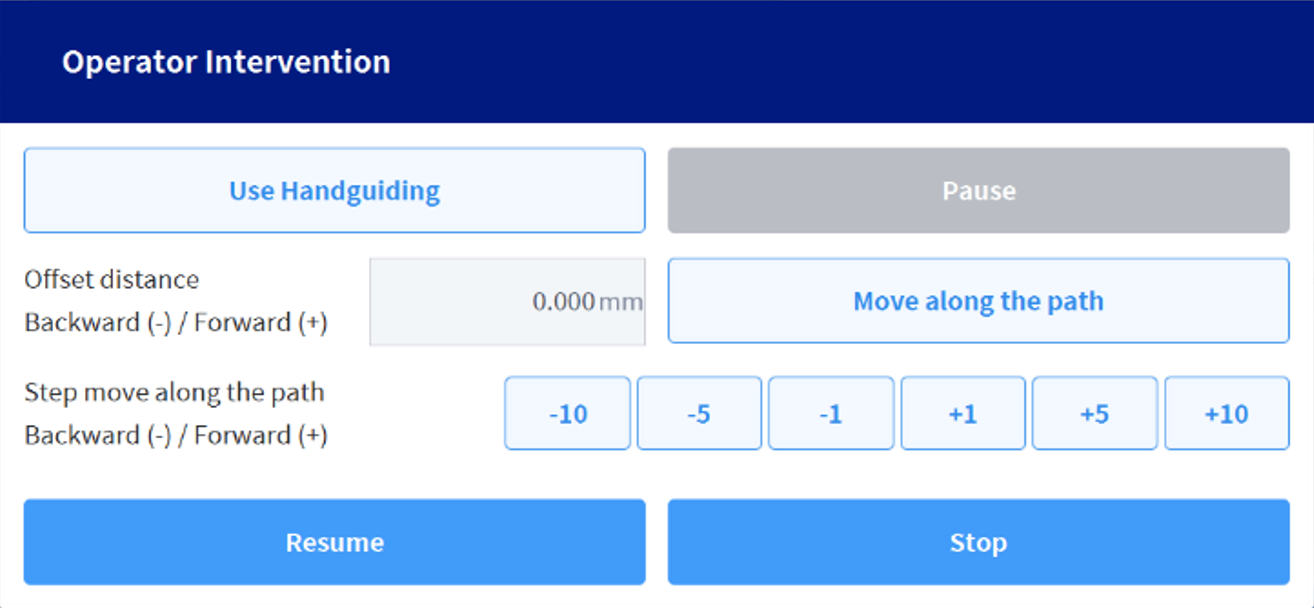
De knop "Beweeg langs het pad" en de knop "Stap verplaatsen (-10,-5,-1,+1,+5,+10)" voeren dezelfde actie uit. De eerste beweegt echter vooruit of achteruit vanaf de referentiepositie met een handmatig ingevoerde offset, terwijl de laatste een punt vooruit of achteruit richt met een vooraf ingestelde stapoffset. Nadat u een actie hebt voltooid met behulp van de bovenstaande knoppen, verplaatst u de huidige positie met de offset door op een extra knop te drukken.
De knop "Handguiding gebruiken" wordt alleen geactiveerd wanneer een collaboratieve zone is ingesteld en de robotstatus verandert in de status Handguiding, wat direct lesgeven binnen de zone mogelijk maakt. Daarna kunt u direct lesgeven activeren door op de knop aan de achterkant van de cockpit of de Teaching-hanger te drukken.
In de handguiding-modus verandert de knop "Handguiding gebruiken" in de knop "Handguiding beëindigen".
Wanneer u op de knop "Handguiding beëindigen" drukt, eindigt de handguiding-status. Op dit moment worden om veiligheidsredenen de huidige positie, hoek en de waarden van het stoppunt (het tijdstip waarop de eerste pop-up optreedt) van de robot vergeleken om een pop-up te genereren. Als er een pop-up met de volgende inhoud optreedt, moet u opnieuw direct lesgeven om de positie en houding van de robot te corrigeren en het opnieuw proberen.
Als de rechtelijnige afstand tussen de huidige TCP-positie en de TCP op de stoppositie meer dan 20 cm verschilt
Als het verschil tussen de huidige Joint Angle en de Joint Angle op het stoppunt meer dan 1~3 assen (10 graden) / 4~5 assen (30 graden) / 6 assen (60 graden) verschilt
Deze functie wordt alleen ondersteund tijdens MoveL / MoveC / MoveB-bewerkingen.
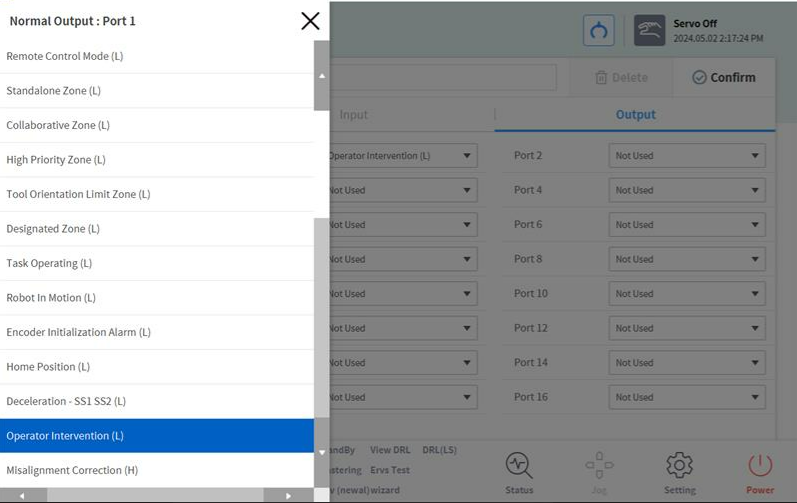
U kunt de functie Normal Output gebruiken om aan te geven dat er een pop-up is opgetreden. Het signaal blijft actief terwijl de pop-up optreedt en wordt gedeactiveerd wanneer de pop-up eindigt.
Workcell Manager - Normal I/O - Output - Operator Intervention (L)
Hier is het gebruiksscenario:
Ontvang een digitaal invoersignaal van de gebruiker of een aangesloten apparaat terwijl het programma wordt uitgevoerd.
De robot pauzeert en er verschijnt een pop-up voor interventie van de operator.
(Als u direct teaching gebruikt) Druk op de knop Use Handguiding en druk vervolgens op de knop aan de achterkant van de cockpit of teaching pendant om direct teaching te activeren. Nadat de directe teaching-bewerking is voltooid, drukt u op de knop End Handguiding.
Druk op de knop Beweeg langs het pad om de robot langs het pad te verplaatsen.
Nadat u de robot zoveel als gewenst hebt verplaatst, drukt u op de knop Hervatten om de taak van de robot te hervatten en de pop-up te sluiten.