
Uitvoeren op basis van de robottool
Voer de onderstaande stappen uit om de robot te verplaatsen op basis van de robottool:
Selecteer het tabblad Taak in het scherm Jog.
Selecteer Basis of Wereld als de coördinaten van het display en stel de Tool in, gebaseerd op het referentiepunt van de taakcoördinaten.
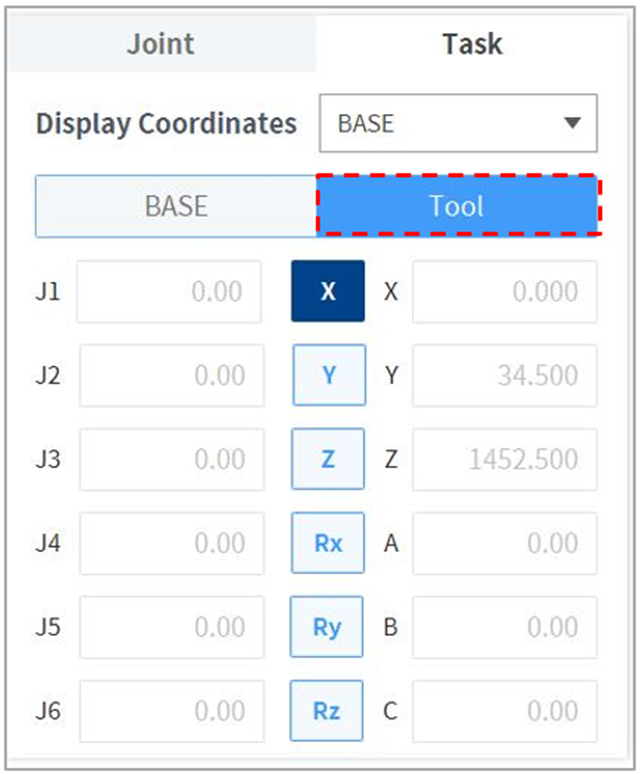
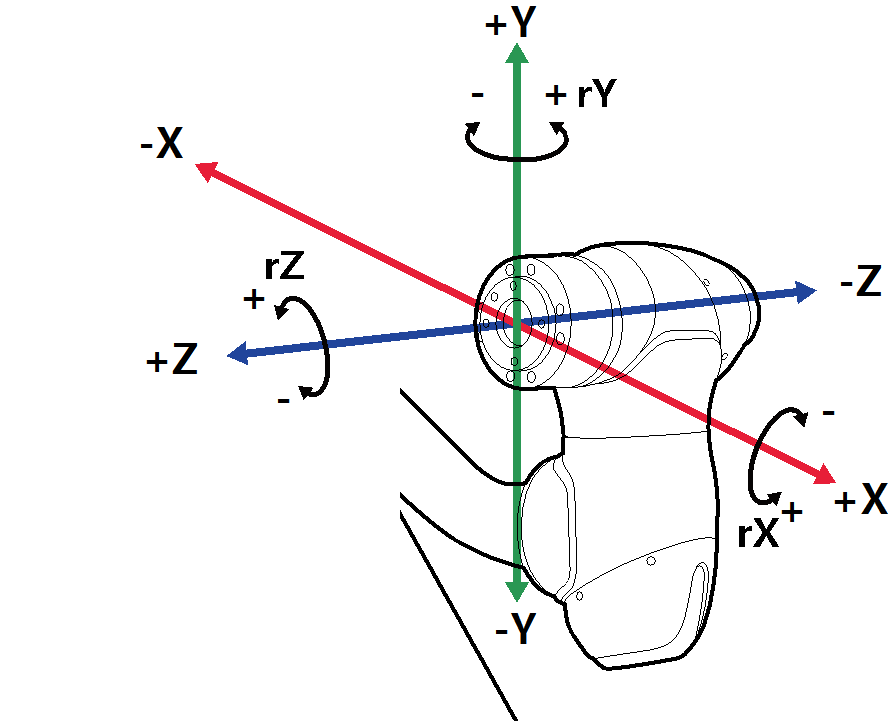
Selecteer de Toolcoördinaten om te verplaatsen.
Houd de richtingsknop (


Opmerking
Het veiligheidsgebied is niet van toepassing in de virtuele modus.
Rx, Ry en Rz worden uitgevoerd in overeenstemming met TCP (tool center position).