
Flens-I/O
Het eindflensdeksel van de robot heeft één M8 spec 8-pins connector. Zie de onderstaande figuur voor de locatie en vorm.
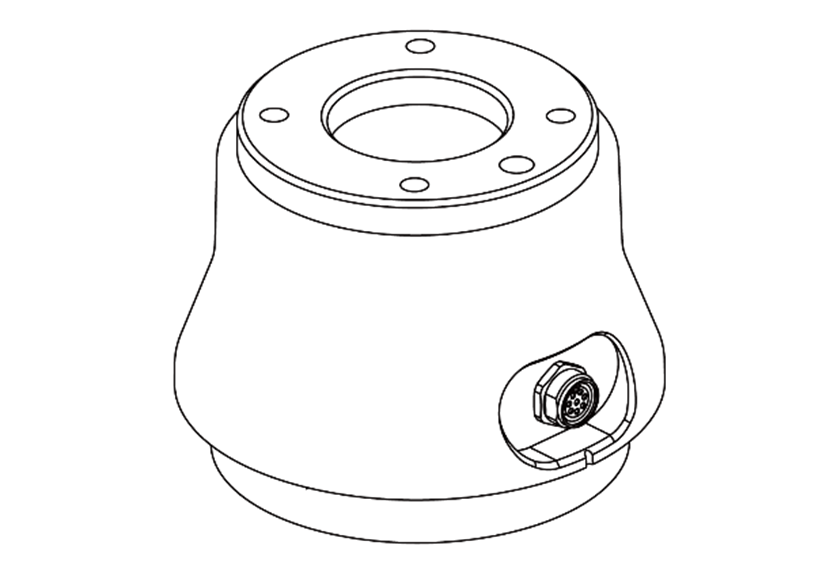
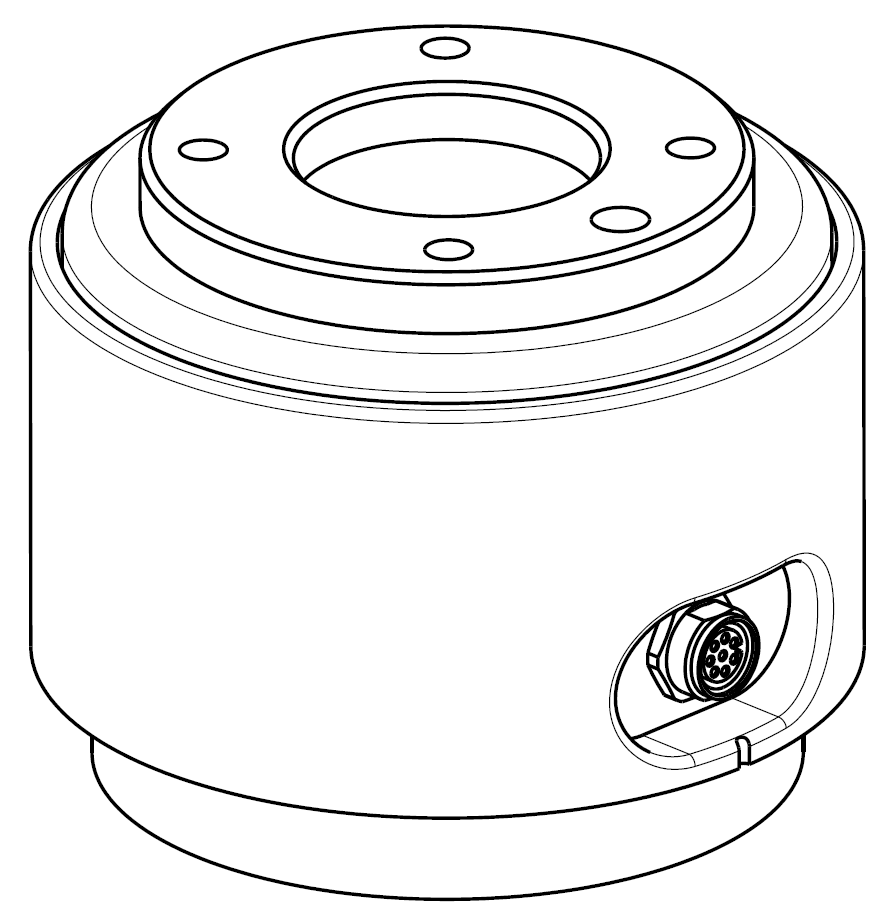
Producten die vanaf augustus 2022 zijn vervaardigd, hebben hun uiterlijk en connectorrichting veranderd, zoals weergegeven in de onderstaande afbeelding.
De connector levert de stroom- en besturingssignalen die nodig zijn voor de bediening van de grijper of de sensoren die in de specifieke robotgereedschappen zijn ingebouwd. Hieronder volgen voorbeelden van industriële kabels (gelijkwaardige kabels kunnen worden gebruikt):
- Phoenix contact 1404178 (recht)
- Phoenix contact 1404182 (recht hoek)
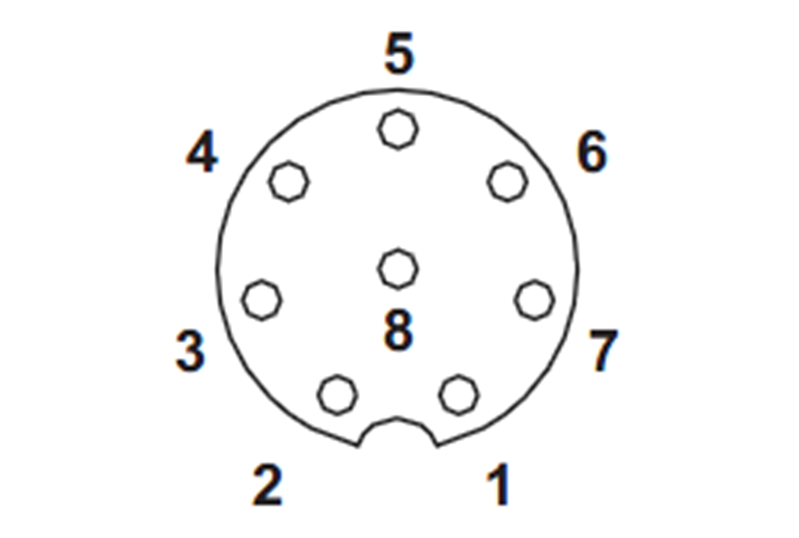
De penindeling voor elke connector is als volgt:
Schematic Diagram
Voor producten die vanaf augustus 2022 zijn gefabriceerd, is de oriëntatie van de connector gewijzigd, zoals weergegeven in de onderstaande afbeelding.
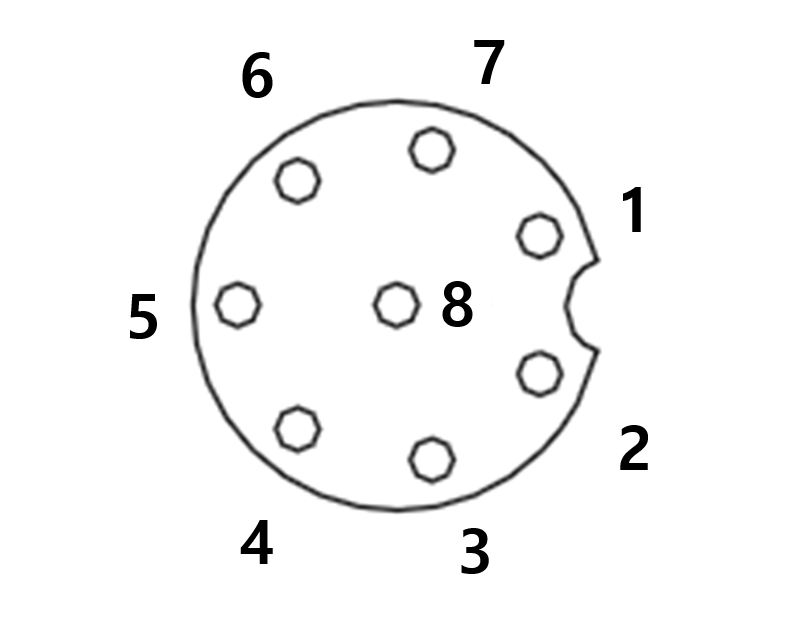
De I/O-functies die via de X1-connector worden geleverd, verschillen van elkaar. Raadpleeg onderstaande tabel voor gedetailleerde I/O-instellingen.
X1-instelling (Digitale I/O, RS 485)
No | Signal | Note |
1 | RS485 A | Mfg date
|
2 | RS485 B | |
3 | Digital Output 1 | |
4 | Digital Output 2 | |
5 | +24V | |
6 | Digital Input 2 | |
7 | Digital Input 1 | |
8 | GND |
X1-instelling (Digitale I/O, RS 485)
De instelling is sinds 21 januari 2021 als volgt gewijzigd.
No | Signal | Note |
1 | Digital Input 1 | Mfg date
Mfg date
Andere serienummers toegepast
|
2 | Digital Output 1 | |
3 | Digital Output 2 | |
4 | RS485 A | |
5 | +24V | |
6 | RS485 B | |
7 | Digital Input 2 | |
8 | GND |
Waarschuwing
- Configureer tools en grijpers na controle van de I/O-configuratie op basis van productiedatum (robot labal mfg datum).
- U kunt het vinden op Doosan Robotlab. (https://robotlab.doosanrobotics.com)
- Als u robottools uitvoert en de I/O-configuratie negeert, kan het product permanente schade oplopen.
Intern vermogen van de flens-I/O is ingesteld op 24 V. Raadpleeg onderstaande tabel voor gedetailleerde vermogensspecificaties tijdens de I/O-aansluiting.
Parameter | Min | Typ | Max | Eenh |
Voedingsspanning | - | 24 | - | V |
Toevoerstroom | - | 2 | 3 | A |
Digitale output | - | 2 | - | EA |
Digitale input | - | 2 | - | EA |
Sinds 22 maart 2024 wordt de instelling als volgt in rekening gebracht
X1 -instelling
No | Signal |
|---|---|
1 | Digital Input 1 |
2 | Digital Output 1 |
3 | Digital Output 2 |
4 | Analog Input 1 / RS-485 + |
5 | +24V / +12V / 0V (off) |
6 | Analog Input 2 / RS-485 - |
7 | Digital Input 2 |
8 | GND |
Beschrijving van I/O -functies
| type | Description |
|---|---|
| Power | Stel de interne voeding in op 0V (standaard), 12V of 24V |
| Digital Output | ingesteld op PNP (Source Type, standaard) of NPN (Sink Type) |
| Digital Input | PNP (brontype, standaard) |
| Analog Input | ingesteld op Spanning (0-10V) of Stroom (4-20mA, standaard) |
| RS-485 | Maximale baudrate van 1M |
Stel de interne voeding in op 0V, 12V of 24V.
Hieronder vindt u de elektrische specificaties:
| Parameter | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply voltage (12V mode) | 11.4 | 12 | 12.6 | V |
| Supply voltage (24V mode) | 22.8 | 24 | 25.2 | V |
| Supply current | - | - | 3 | A |
Waarschuwing
- Stel het gereedschap en de grijper zo in dat ze geen gevaar opleveren wanneer de stroom wordt onderbroken.(Bijvoorbeeld wanneer een workpiece van de tool valt.)
- De aansluiting nr. 5 van elke connector geeft te allen tijde 24 V uit terwijl de robot van stroom wordt voorzien. Zorg ervoor dat u de stroomtoevoer naar de robot onderbreekt bij het instellen van het gereedschap en de grijper.