
Uitvoeren op basis van de robottool
Voer de onderstaande stappen uit om de robot te verplaatsen op basis van de robottool:
- Selecteer het tabblad Taak in het scherm Jog.
- Selecteer Basis of Wereld als de coördinaten van het display en stel de Tool in, gebaseerd op het referentiepunt van de taakcoördinaten.
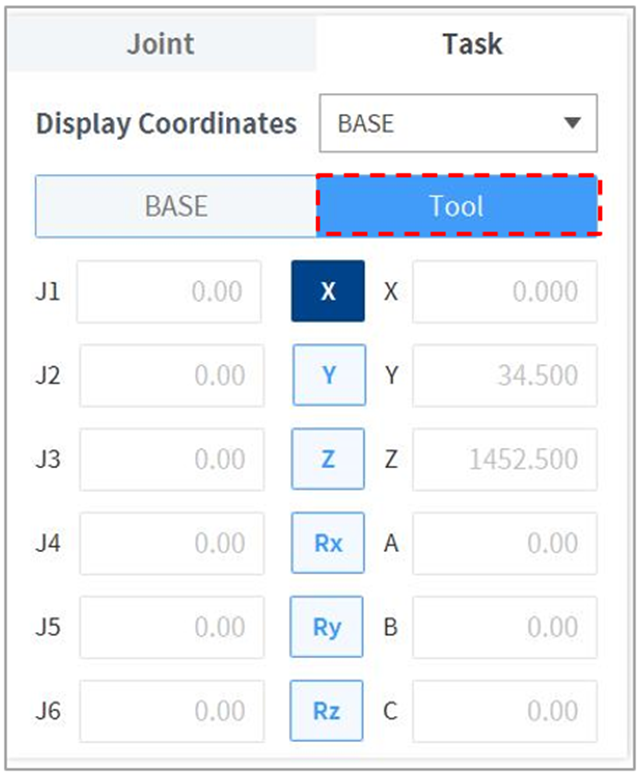
- Selecteer de Toolcoördinaten om te verplaatsen.
- Houd de richtingsknop (


Opmerking
- Het veiligheidsgebied is niet van toepassing in de virtuele modus.
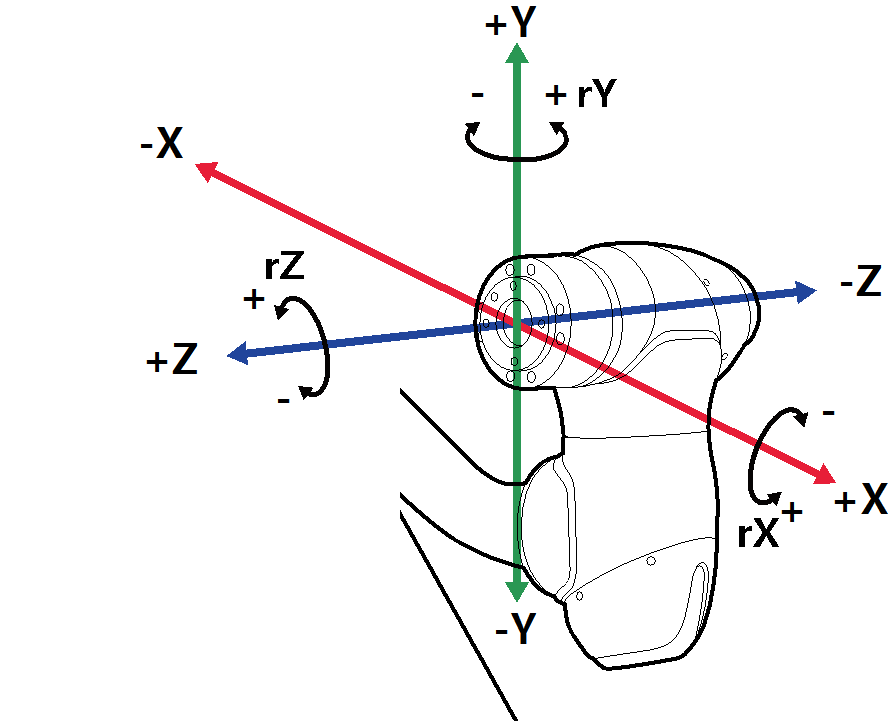
- Rx, Ry en Rz worden uitgevoerd in overeenstemming met TCP (tool center position).