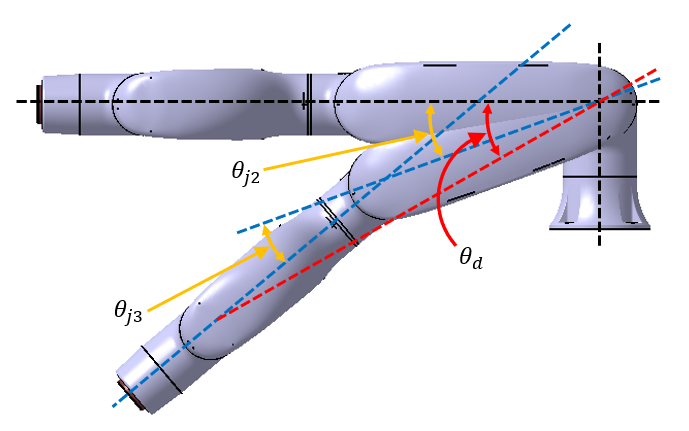
De meting van gewricht 1 wordt uitgevoerd met de roterende as loodrecht op de grond en tijdens horizontale beweging.
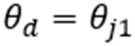
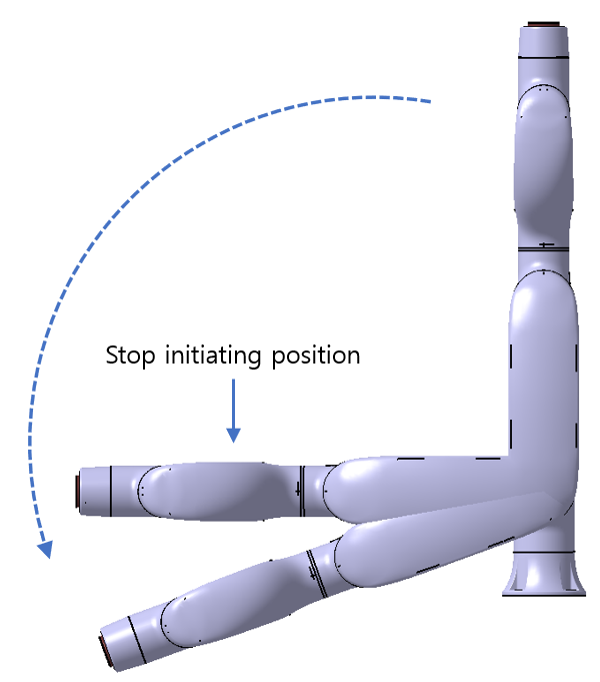
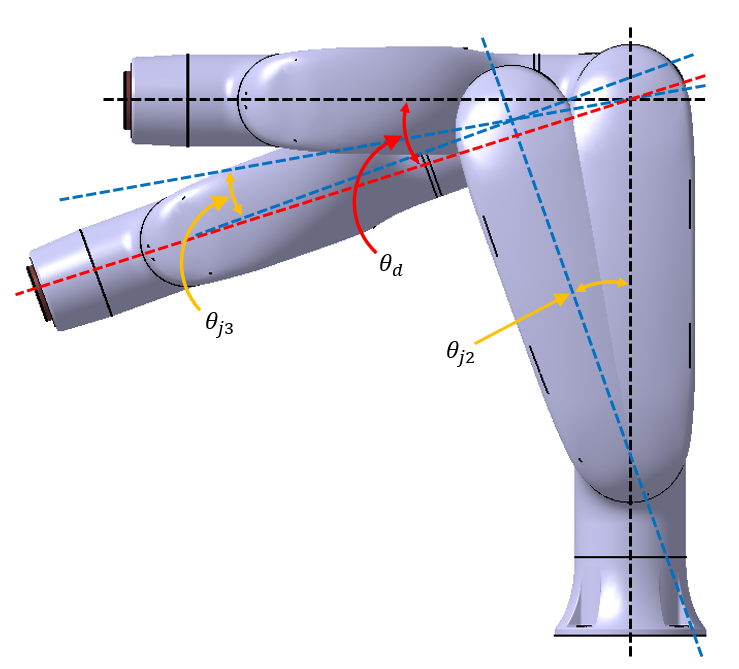
De metingen aan de gewrichten 2 en 3 worden uitgevoerd met de roterende as parallel aan de grond en wanneer de robot in een neerwaartse beweging verticaal ten opzichte van de grond wordt gestopt.
Opmerking
De metingen gaan uit van het slechtste geval. De meting kan variëren afhankelijk van de omstandigheden
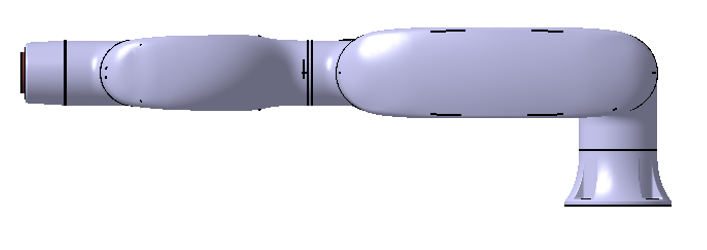
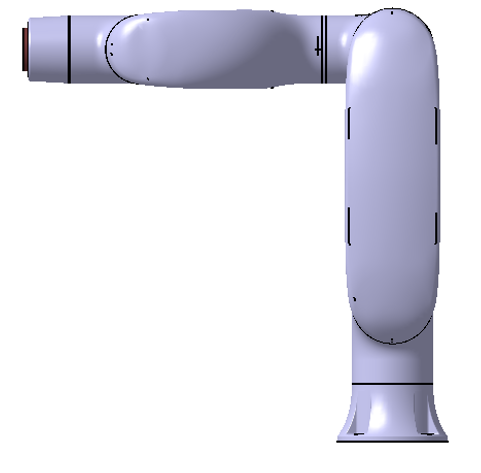
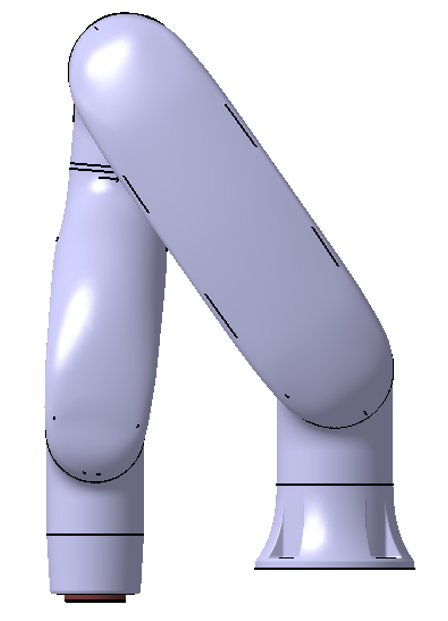
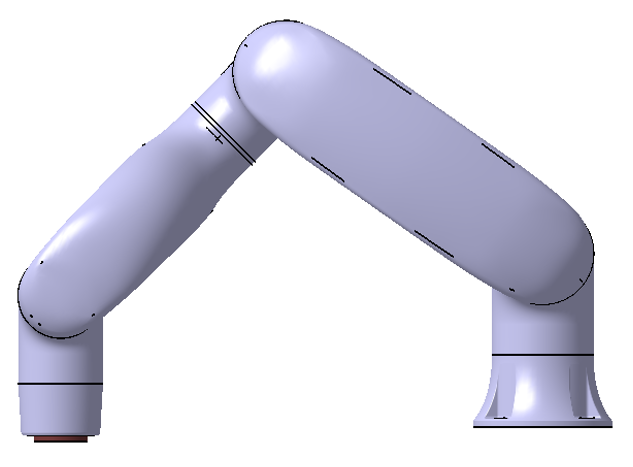
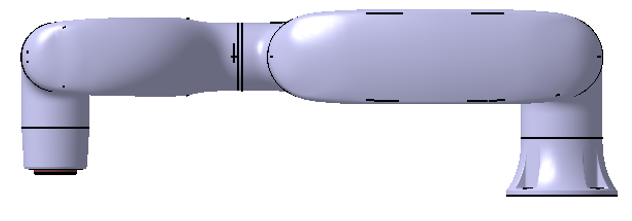
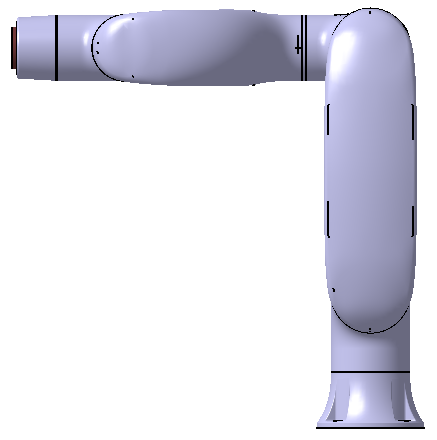
The pose for 33%, 66%, and 100% of extension
Joint 1
Joint 2
Joint 3
100% extension
Stop category 0
33% extension
Stop category 1
-
66% extension
Stop category 1
-
100% extension
Stop category 1
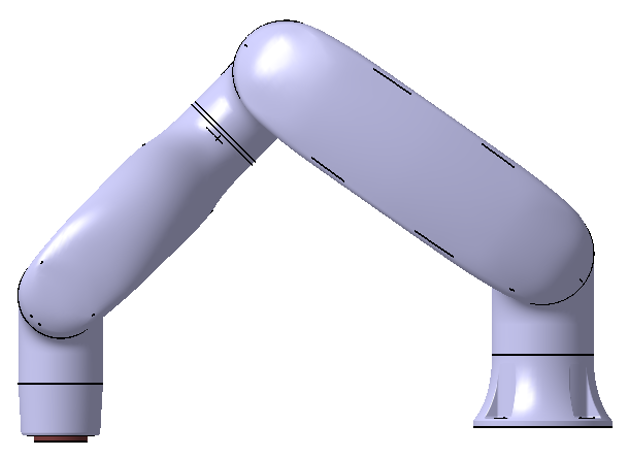
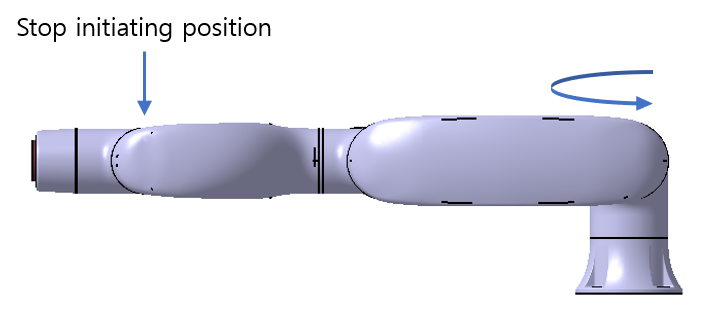
The pose when the stop is initiated and the measured angle ()
Pose when the stop is initiated
Measured Angle
Joint1
No slip,
Joint2
Joint3
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.