
Probeer de voorbeeldopdrachten MoveJ/MoveL
VERPLICHT NORMAAL 20 MIN.

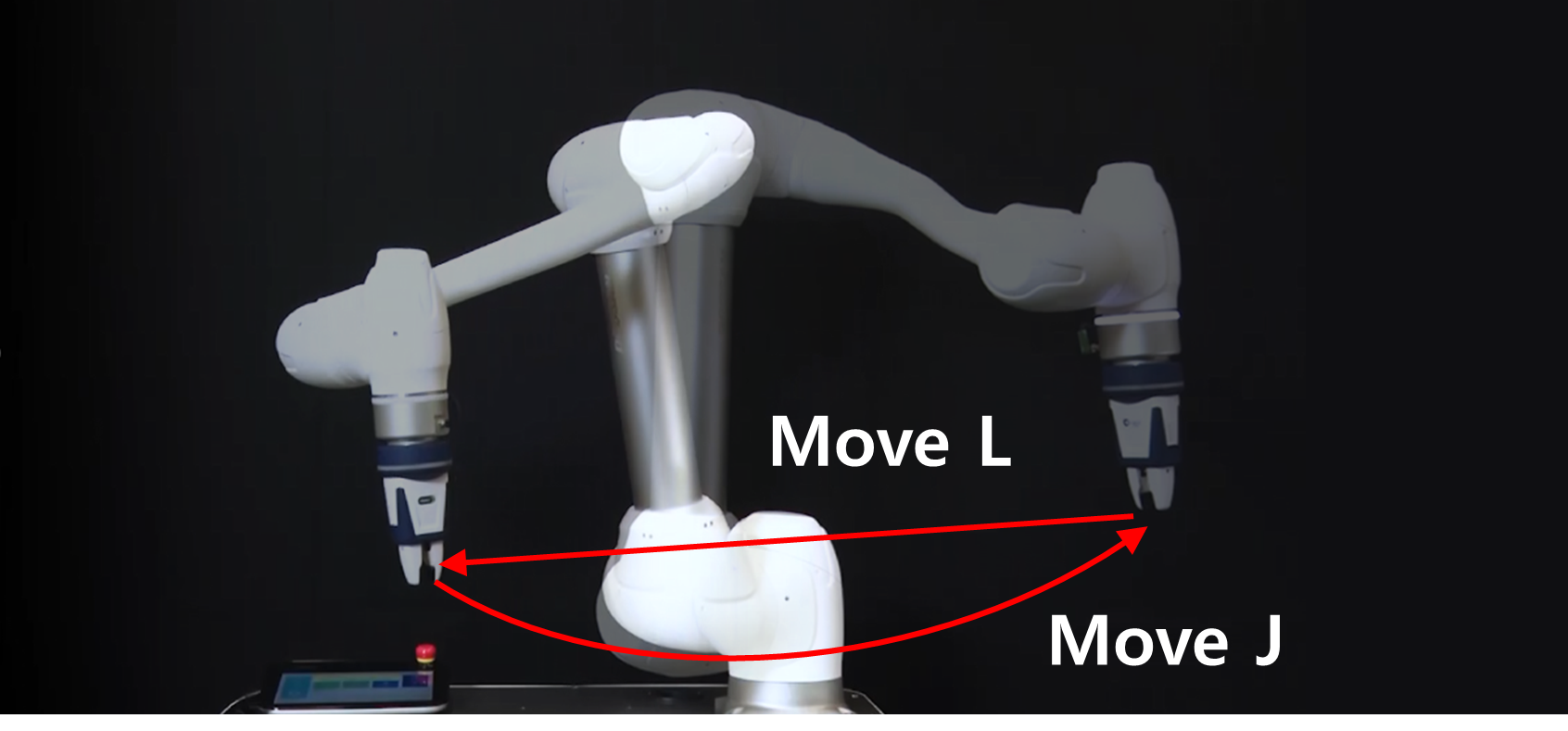
In dit voorbeeld voegt u MoveJ- en MoveL-opdrachten toe in de Task Builder, voert u deze uit en vergelijkt u het verschil tussen de twee bewegingen.
Let op.
- Lees en volg voordat u het monster probeert Voorzorgsmaatregelen voor gebruik. Zie voor meer informatie DEEL 1. Veiligheidshandleiding.
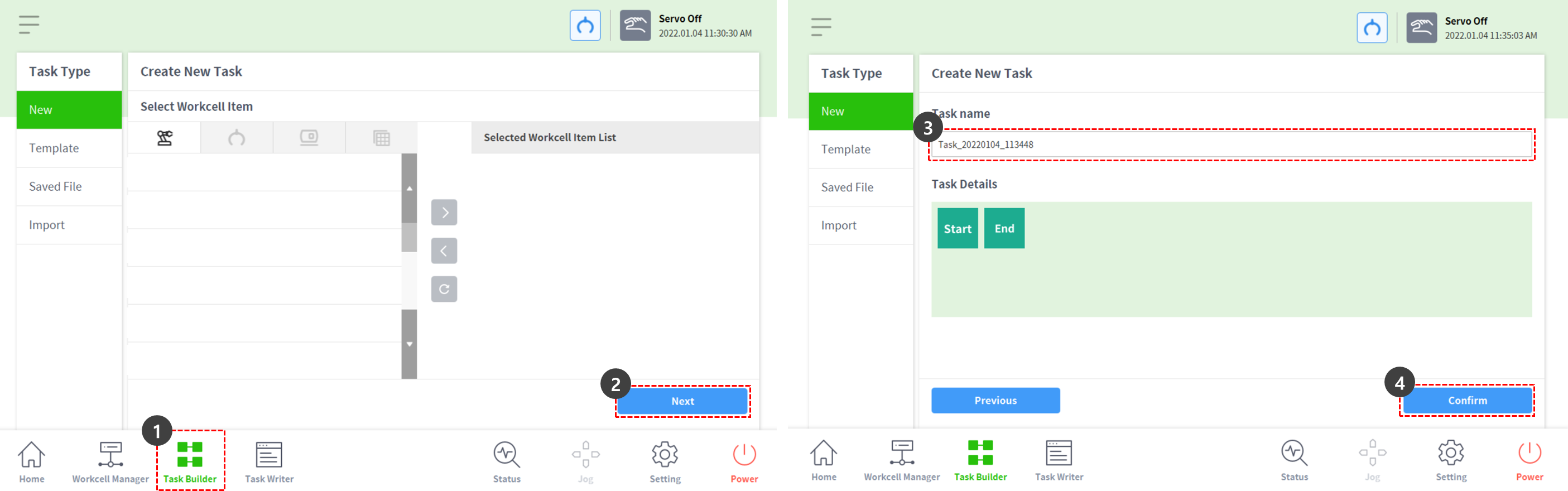
- Selecteer de Taaksamensteller op de balk onder aan het scherm.
- De programmeermethode in de Task Writer is vrijwel identiek aan die van de Task Builder.
- Druk op de knop volgende.
- Om een programma te maken met geregistreerde werkcel-items, zoals grijpers, moet een werkcel-item worden toegevoegd.
- Druk in dit voorbeeld op de knop volgende zonder items en vaardigheden in de werkcel te selecteren.
- Voer een taaknaam in.
- Druk op de bevestigingstoets.
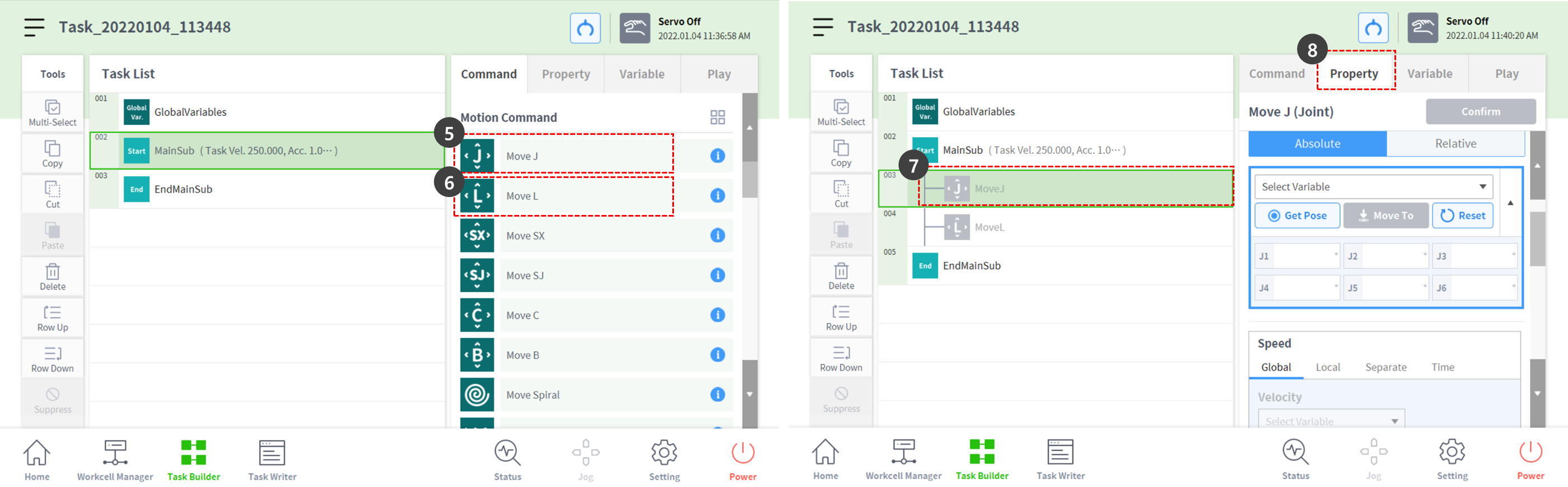
- Terwijl MainSub op de tweede regel is geselecteerd, drukt u op MoveJ om de opdracht MoveJ toe te voegen aan de takenlijst.
- De opdracht wordt toegevoegd aan de volgende regel van de geselecteerde regel.
- Druk op MoveL om de opdracht MoveL toe te voegen aan de takenlijst.
- Selecteer MoveJ op de derde regel van de takenlijst.
- Selecteer het tabblad eigenschap rechtsboven. Eigenschapswaarden van de opdracht kunnen worden ingesteld op het tabblad eigenschap.
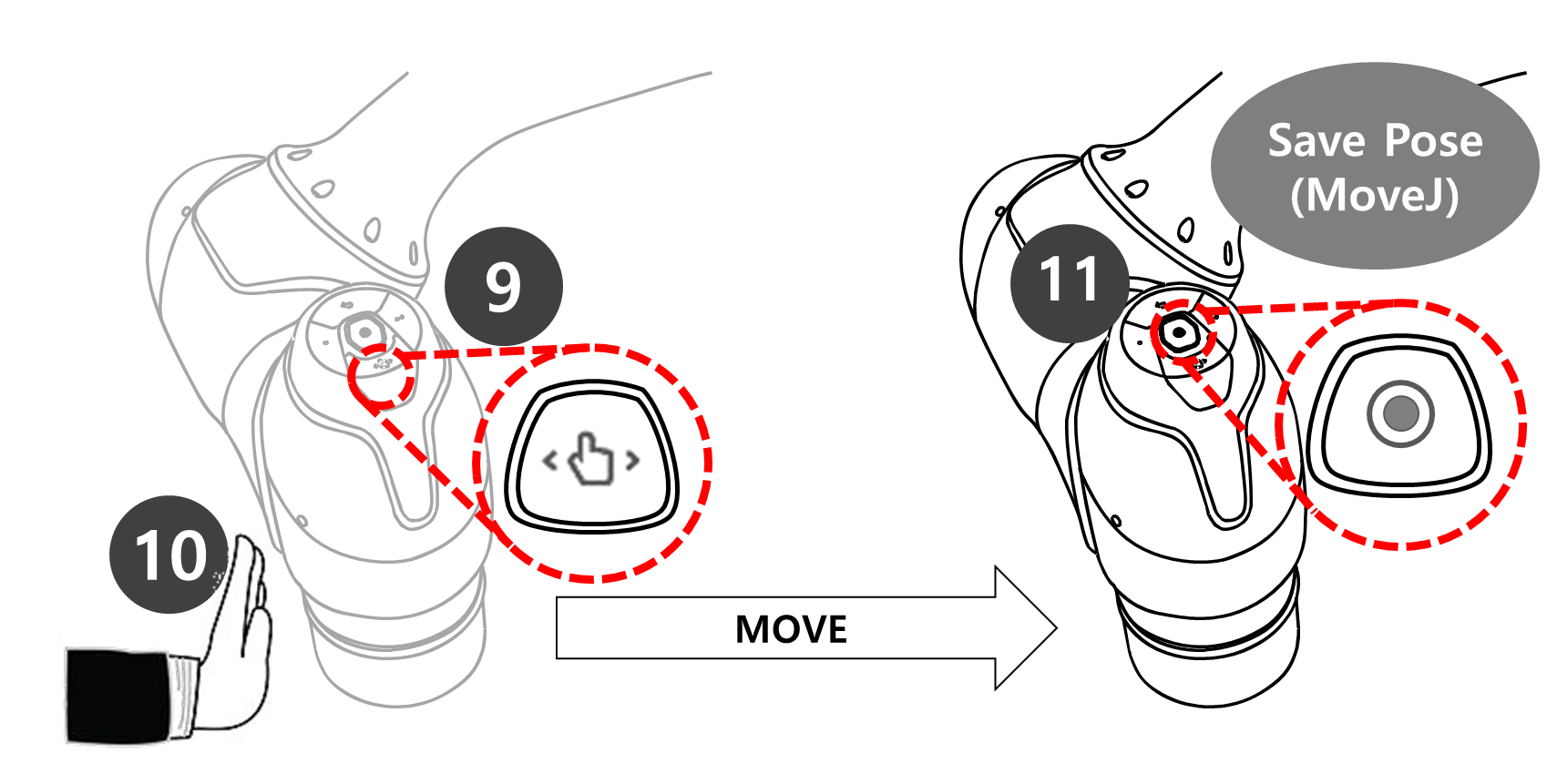
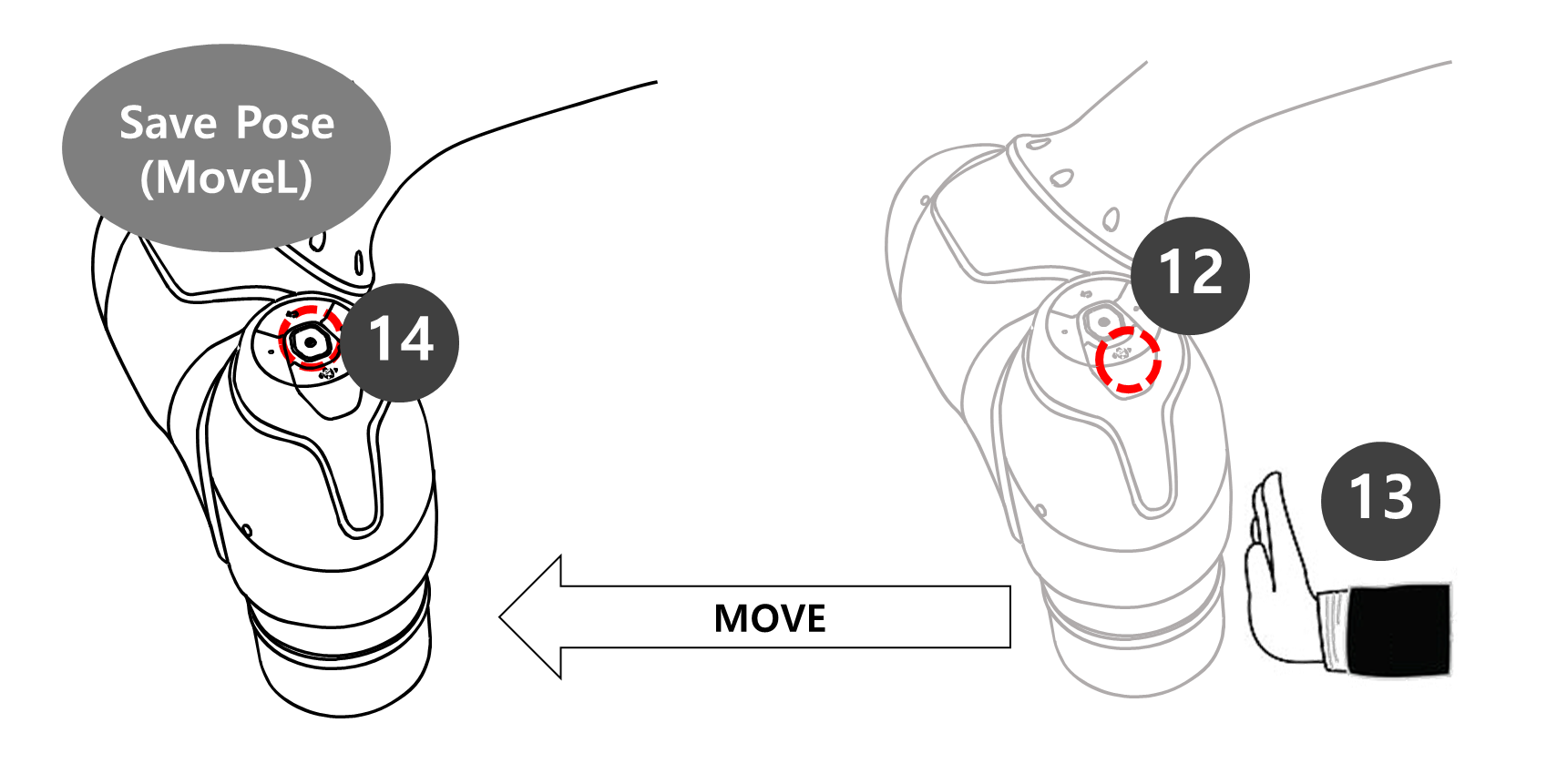
- Druk met één hand op de handgeleidingsknop, die een handvorm heeft, op de cockpit aan de bovenkant van de robot Stap 9 t/m 11 redt de houding van MoveJ.
- In het geval van robots die geen cockpit kunnen gebruiken, raadpleegt u de “Opmerking” hieronder.
- Gebruik de andere hand om de robot naar een veilige plek te duwen.
- Laat de knop voor handgeleiding los en druk op de knop voor het opslaan van de pose.
- Druk met één hand op de handgeleidingsknop, die een handvorm heeft, op de cockpit aan de bovenkant van de robot Stap 12 t/m 14 redt de houding van MoveL.
- U hoeft MoveL niet te selecteren in de takenlijst. Als u op de knop pose opslaan drukt, wordt de takenlijst automatisch naar de taakregel verplaatst.
- Gebruik de andere hand om de robot naar een veilige plek te duwen.
- Laat de knop voor handgeleiding los en druk op de knop voor het opslaan van de pose.
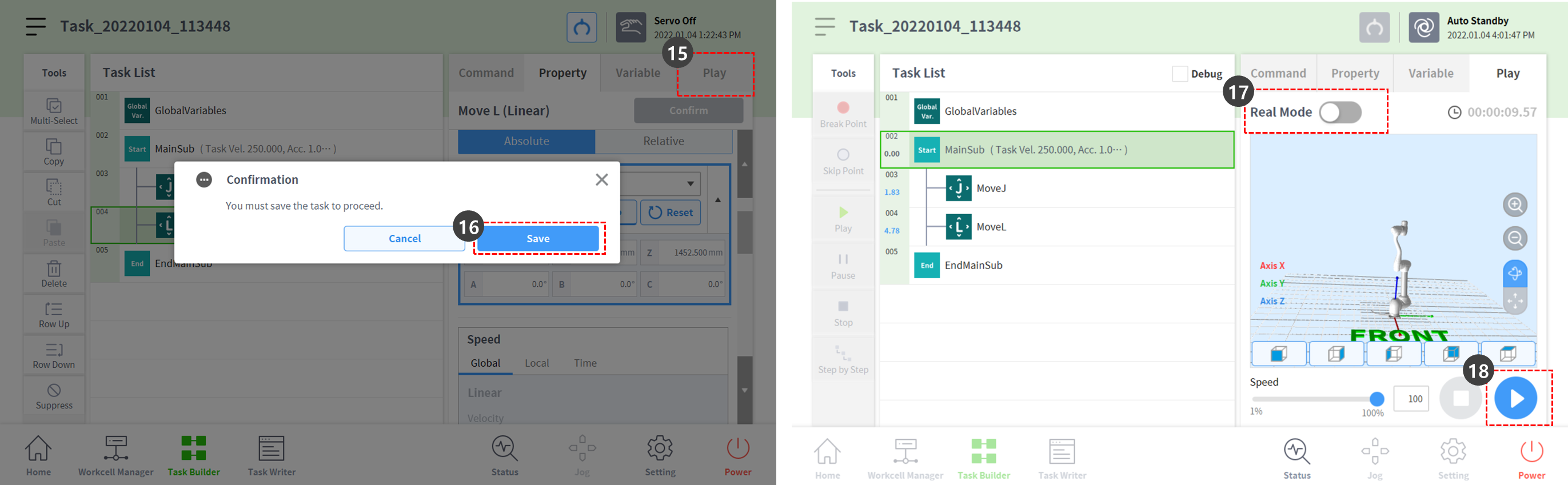
- Druk op het tabblad afspelen om de taak uit te voeren.
- Omdat de taak niet wordt opgeslagen, wordt een pop-upvenster weergegeven waarin wordt gevraagd de taak op te slaan. Druk op Opslaan.
- Stel de schakelknop voor de reële modus in op de uitgeschakelde status (grijs).
- Als de echte modus is uitgeschakeld, beweegt de robot niet en beweegt alleen de virtuele robot in de schermsimulator.
- Voordat u de taak uitvoert, is het raadzaam de taak in deze simulatiemodus te testen.
- Druk op de knop afspelen rechtsonder.
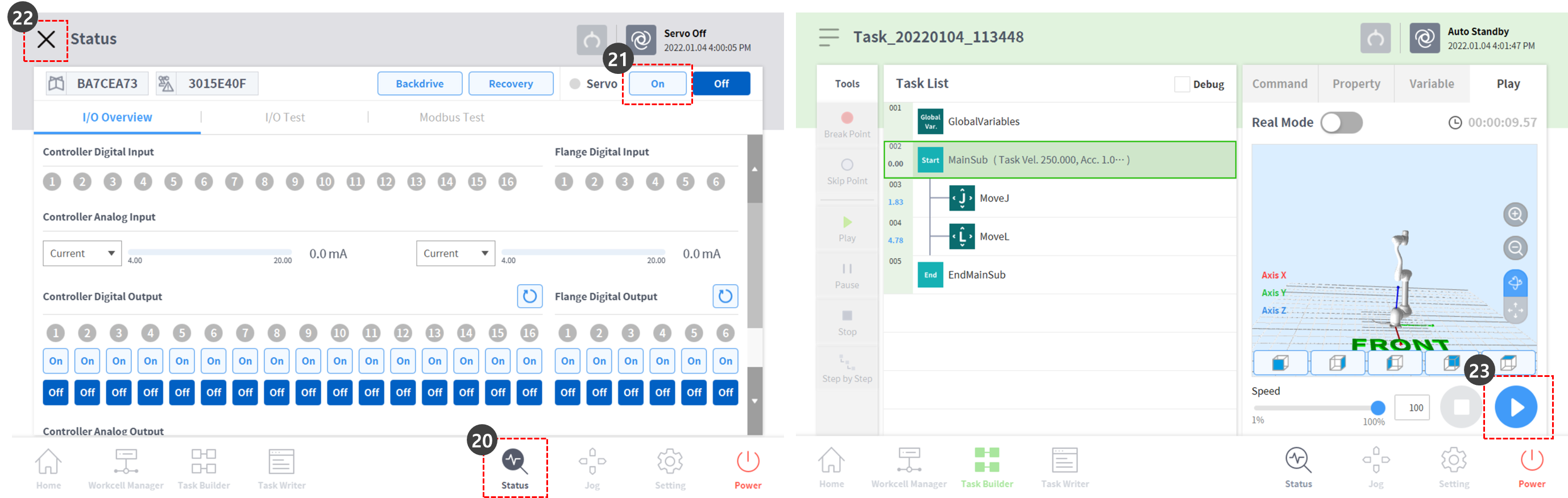
- Er wordt een foutbericht weergegeven dat de robot niet gereed is. Druk op de knop X om het pop-upvenster te sluiten.

- De robot kan alleen bewegen in de status Servo aan.
- De Servo aan en Servo uit van de robot kunnen worden in- en uitgeschakeld via Status > Servo.
- Om de robot in de status gereed te zetten, moet de robot op servo aan staan. Selecteer de Status op de balk onder aan het scherm.
- Druk op de knop Servo aan.
- Druk op de X linksboven om het statusvenster te sluiten.
- Druk nogmaals op de knop afspelen rechtsonder. De robot zal succesvol bewegen in de simulator.
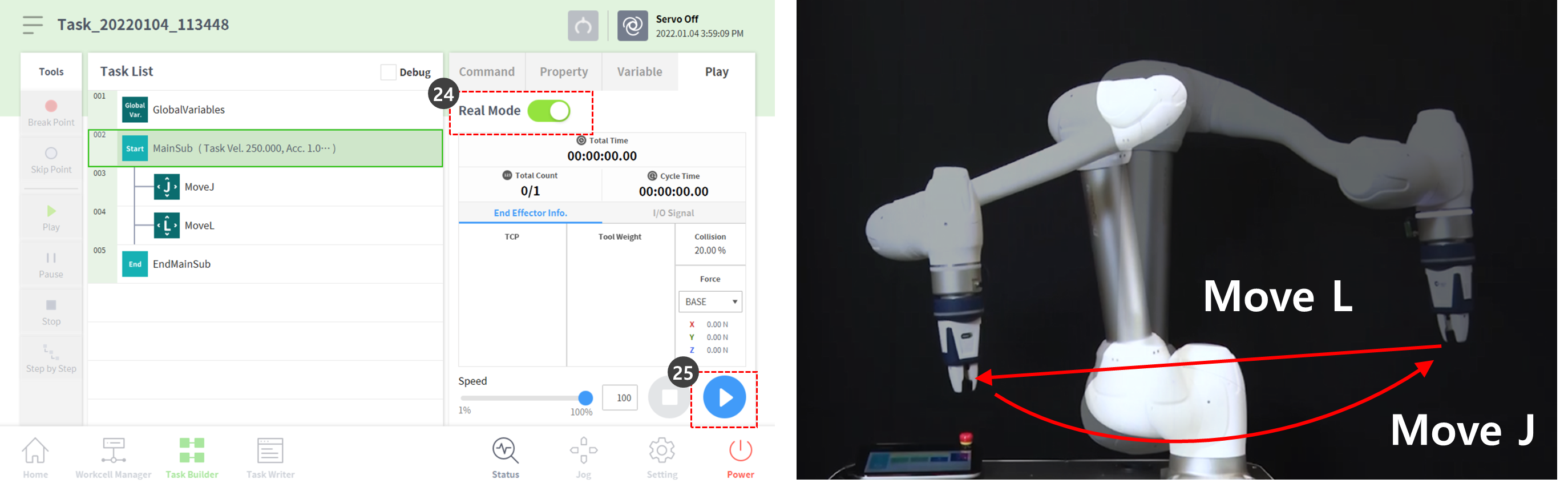
- Stel de schakelknop voor de echte modus in op de inschakelstatus (groen) om de eigenlijke robot te bedienen.
- Druk op de knop afspelen rechtsonder. De eigenlijke robot zal met succes bewegen.
Opmerking
De knop voor het opslaan van de houding van de cockpit voert de volgende functie in dezelfde volgorde uit op het scherm voor het leren van de handzender.
- Druk op eigenschap > knop houding ophalen om de huidige pose-informatie te laden.
- Druk op de knop bevestigen om de wijzigingen in de opdrachteigenschap op te slaan.
- Selecteer de volgende opdracht.
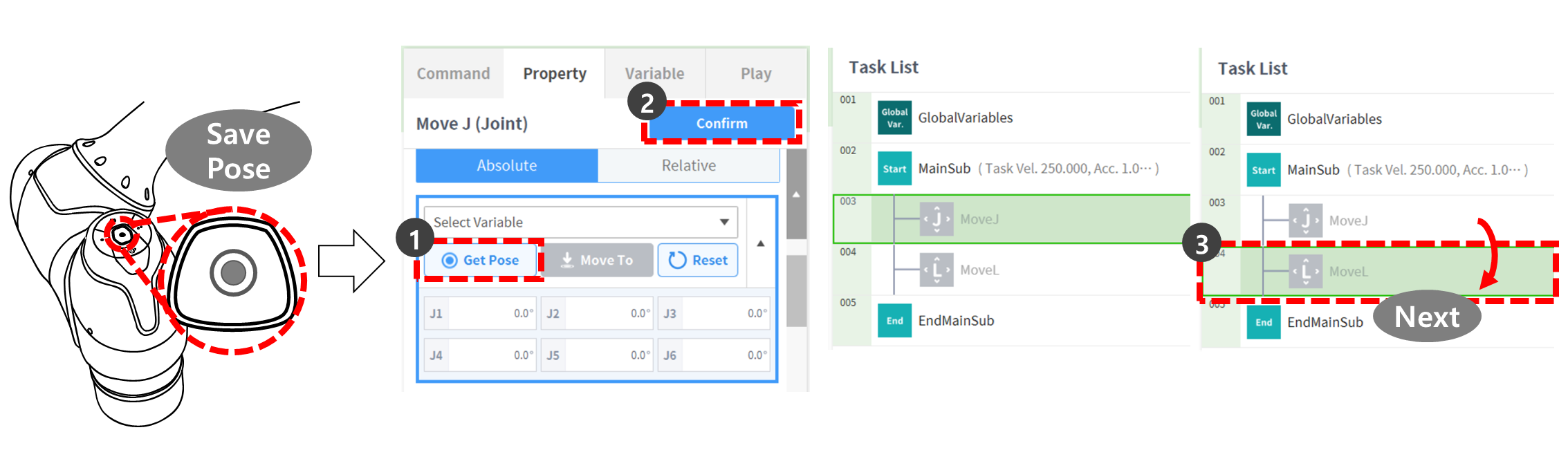
Hiermee is het mogelijk om snel taken te programmeren door meerdere bewegingscommando's tegelijk aan de takenlijst toe te voegen, de robot te verplaatsen terwijl u op de handgeleidingsknop op de cockpit drukt en op de knop Get pose drukt.