Inzicht in de basisprincipes van skill-opdrachten
Skill-opdrachten zijn gebaseerd op een aantal audiobediening.
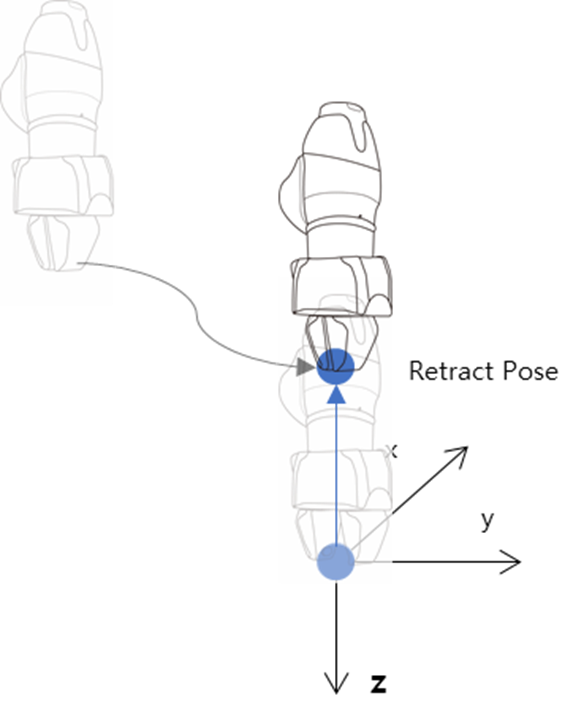
Voordat een robot kan gaan werken, moeten het gewicht en het TCP (Tool Center Point) van het gereedschap dat op de robot is gemonteerd, geconfigureerd zijn en moet het operationele basispatroon van de vaardigheidsopdrachten een benaderingspose en terugtrekkingspose hebben die loodrecht op de referentiepose staan.
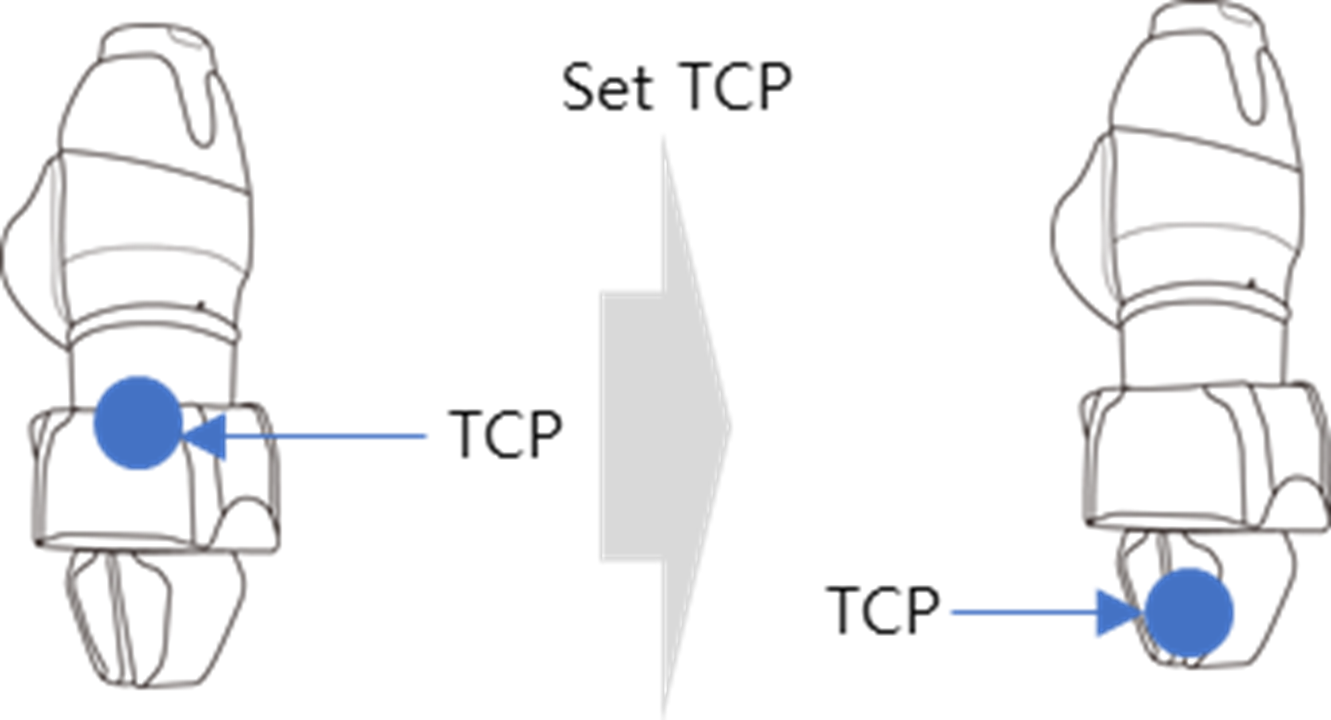
TCP-instellingen: Door een eindeffector-skill-opdracht te gebruiken, wordt de TCP offset-instelling automatisch gewijzigd. De fase voor de uitvoering van de skill-opdracht van de eindeffector bevat een offset-instelling die geschikt is voor het TCP van de eindeffector. Als de TCP-offset verandert, kan de combinatiebewegingsfunctie, die de vorige bewegingsopdracht vloeiend verbindt, niet worden gebruikt.
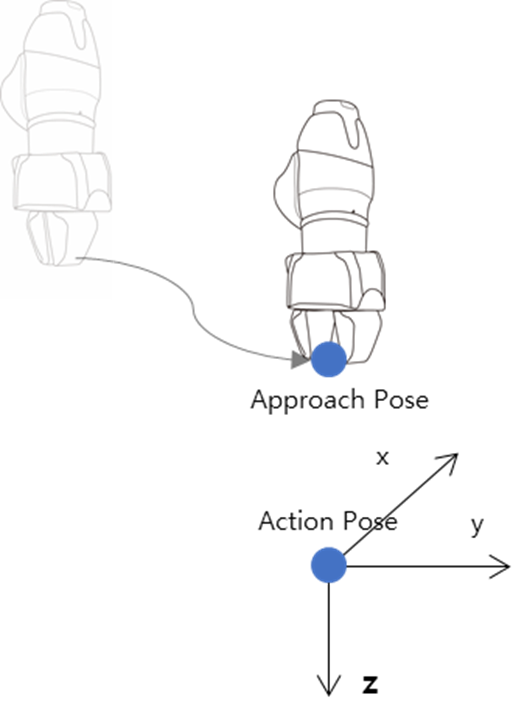
Bewegen naar benaderingspose: Dit is een punt dat beschikbaar is om naar de benaderingspose te gaan. Het is ingesteld in de Z-richting van de Benaderingspose, maar er kan ook een andere richting worden gekozen. De ingevoerde benaderingsafstand wordt automatisch voor de actiepose berekend en de robot verplaatst zich naar het bijbehorende punt.
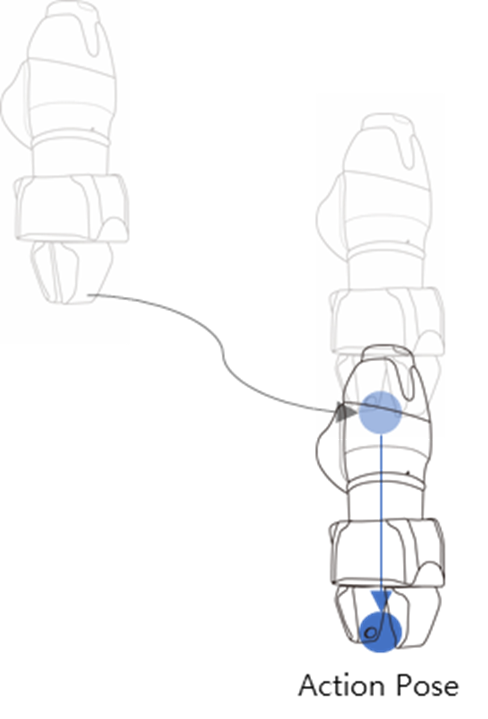
Bewegen naar referentiepose: Dit is het punt op het werkstuk waar de eindeffector werkzaamheden uitvoert. Om andere gedetailleerde coördinaten in te stellen dan de snelheid en versnelling voor de referentiepose: druk op de knop aan de rechterkant van de referentiepose. Het gebruik van het tabblad relatieve coördinaten tijdens het instellen van de gedetailleerde beweging kan echter een storing veroorzaken tijdens het uitvoeren van de vaardigheid. Zorg er dus voor dat u de absolute coördinaten gebruikt voor het aanleren van het referentiepunt.)
Bewegen naar terugtrekpose: Dit is het punt dat wordt gebruikt om het werkonderdeel op te pakken en veilig naar een ander punt te verplaatsen. Het is de Z-richting van de Benaderingspose, maar er kan ook een andere richting worden gekozen. De ingevoerde terugtrekafstand wordt automatisch voor de actiepose berekend en de robot verplaatst zich naar het bijbehorende punt.
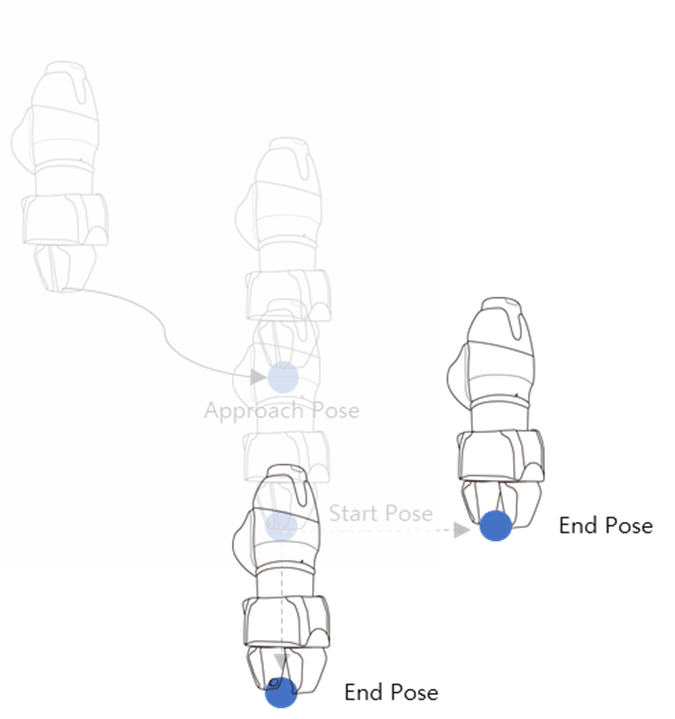
Bewegen naar startpose: Als het doel van de eindeffectoractie niet eindigt met een enkele beweging, kan er een tussenliggend punt en een eindpunt zijn. De actiestartpose is het punt waarop het werk start. (d.w.z. Deur_OpenDicht Vaardigheid – Start pose)
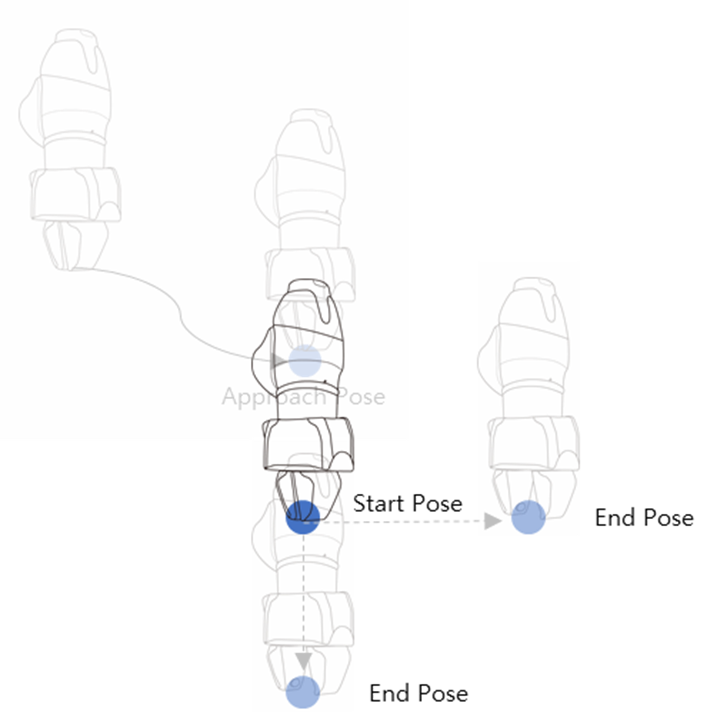
Bewegen naar eindpose: Als het doel van de eindeffectoractie niet eindigt met een enkele beweging, kan er een tussenliggend punt en een eindpunt zijn. De eindpose van actie is het punt waarop het werk eindigt. (d.w.z. Deur_OpenDicht Vaardigheid – Eind pose)