
Instellen van het aansluitblok voor de contactinvoer (TBSFT)
De veiligheids-I/O van de regelaar bestaat uit dubbele contactingangen voor de aansluiting van veiligheidsvoorzieningen. Deze ingangen zijn in twee groepen ingedeeld, afhankelijk van hun gebruik.
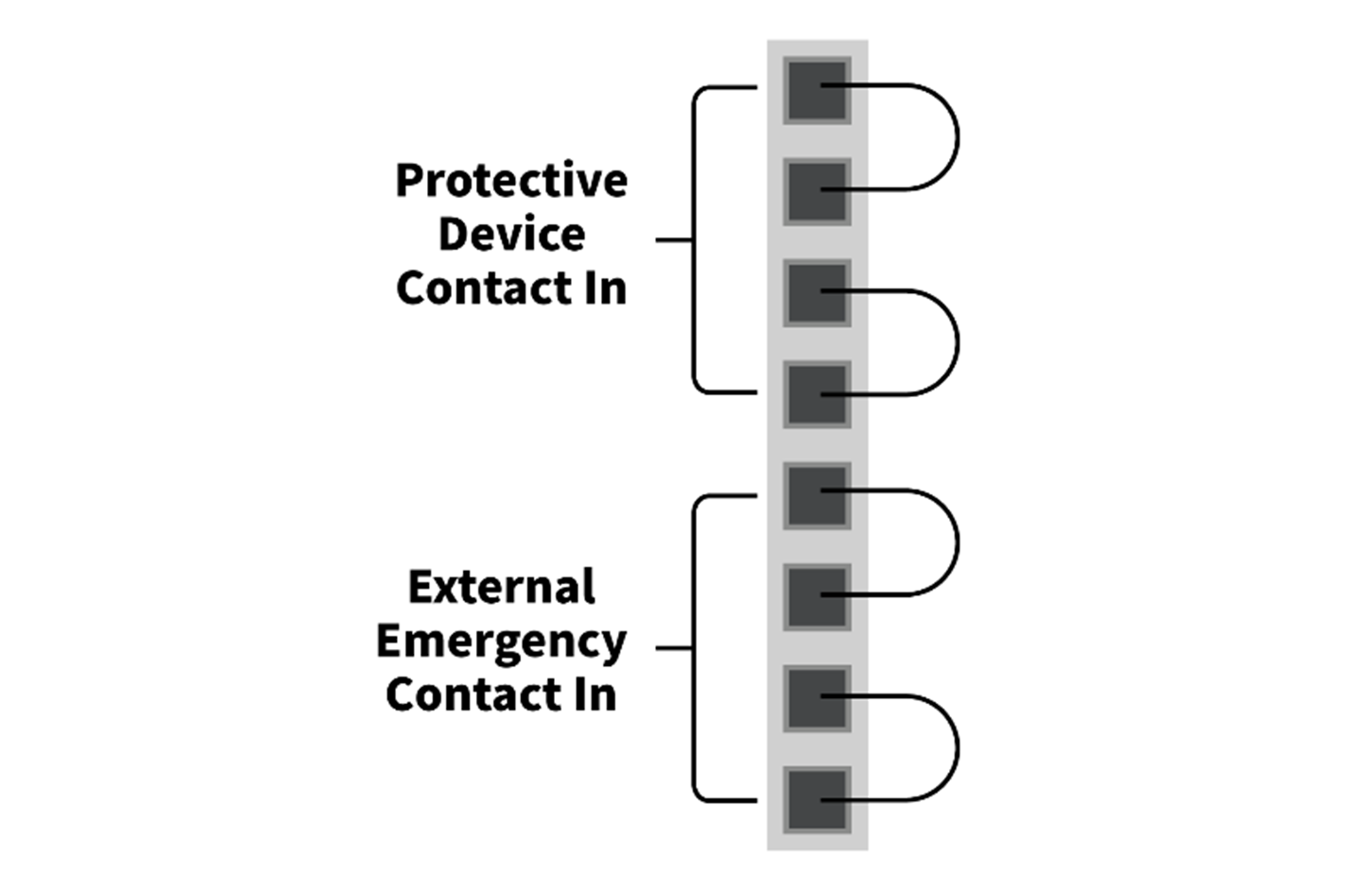
- Twee paar external emergency contact in aan de onderkant: Wordt gebruikt om apparaten aan te sluiten die nodig zijn voor een noodstop, zoals een externe noodschakelaar.
- Twee paar protective device connect in aan de bovenkant: Wordt gebruikt voor het aansluiten van voorzieningen voor een beschermende stop, zoals een lichtgordijn en een veiligheidsmat.
Als er geen externe veiligheidsvoorziening is aangesloten, sluit u elke contactingang als volgt aan:
Het externe veiligheidssignaal dat door de safety controller wordt herkend, is afhankelijk van de normale closed contactstatus, waarbij alle vier de contactingangen normaal gesproken gesloten zijn, en is als volgt:
| Contactstatus | EM1-contact | EM2-contact | PR1-contact | PR2-contact |
|---|---|---|---|---|
Sluiten | Normaal | Normaal | Normaal | Normaal |
Open | Noodstop | Noodstop | Beveiligingsstop | Beveiligingsstop |
Waarschuwing
- Sluit het veiligheidssignaal niet aan op gewone PLC's die geen veiligheids-PLC's zijn. Als u dit niet doet, zal de veiligheidsstopfunctie niet goed werken, wat ernstig letsel of de dood van de gebruiker tot gevolg kan hebben.
- Als een van de contacten open is, zal de robot stoppen met werken volgens de instelling van de veiligheidsstopmodus en gaat de LED-lamp aan de rechterkant van de TBSFT branden. EMGA (Red), EMGB (Red), PRDA (Yellow), PRDB (Yellow)
Opmerking
- EMGA : Emergency Stop Channel A(EM1) LED
- EMGB : Emergency Stop Channel B(EM2) LED
- PRDA : Protective Stop Channel A(PR1) LED
- PRDB : Protective Stop Channel B(PR2) LED
Let op
- Om te controleren op aansluitingsverliezen en -tekorten moet deze klem worden aangesloten op apparaten die een veiligheidssignaal als contact uitzenden. Voor het aansluiten van randapparatuur die veiligheidssignalen als spanning op de safety controller uitvoert, wordt verwezen naar de beschrijving van het .De Configurable Digitale I/O instellen (TBCI1-4,TBCO1-4).