De robot zit in de verpakking om gemakkelijk te kunnen vervoeren of verpakken. Om de robot te kunnen gebruiken, moet de verpakking worden losgekoppeld. Omdat de robot een houding handhaaft die de limiet voor de gewrichtshoek overschrijdt in de verpakking, is het onmogelijk om de status Servo in te stellen als gevolg van een overtreding van de veiligheidslimiet. De robot-LED brandt rood in deze status.
Opmerking
Als er een geval is waarin u de robot moet verpakken vanwege verplaatsing, stelt u de pose van de verpakking in door Move with Packaging pose in de verpakkingsmodus te gebruiken.
Het proces voor het vrijgeven van de verpakking is als volgt:
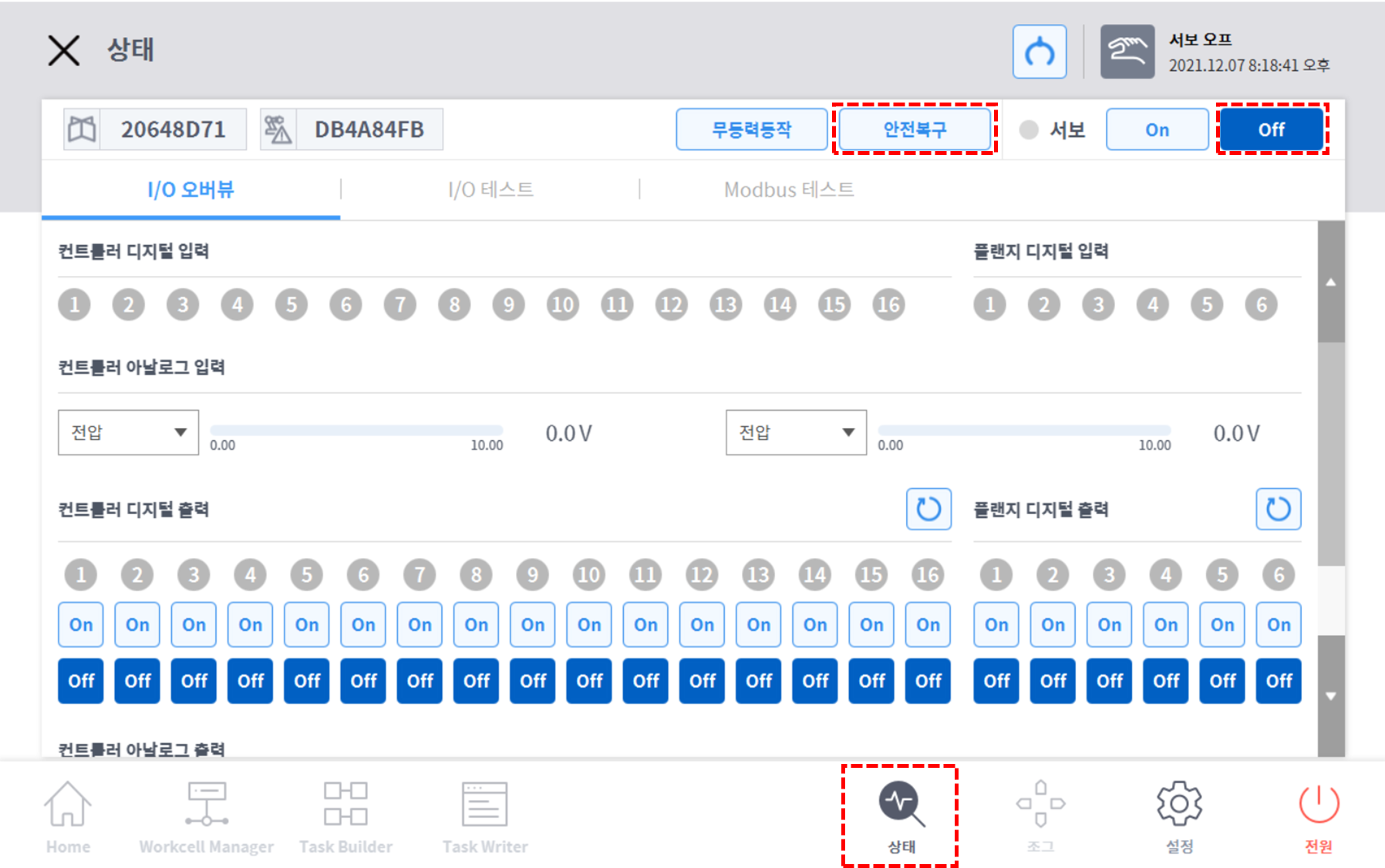
Tik op status op het beginscherm van de handzender.
Tik op de knop Veiligheidsherstel . De knop Veiligheidsherstel is ingeschakeld in de status Servo uit .
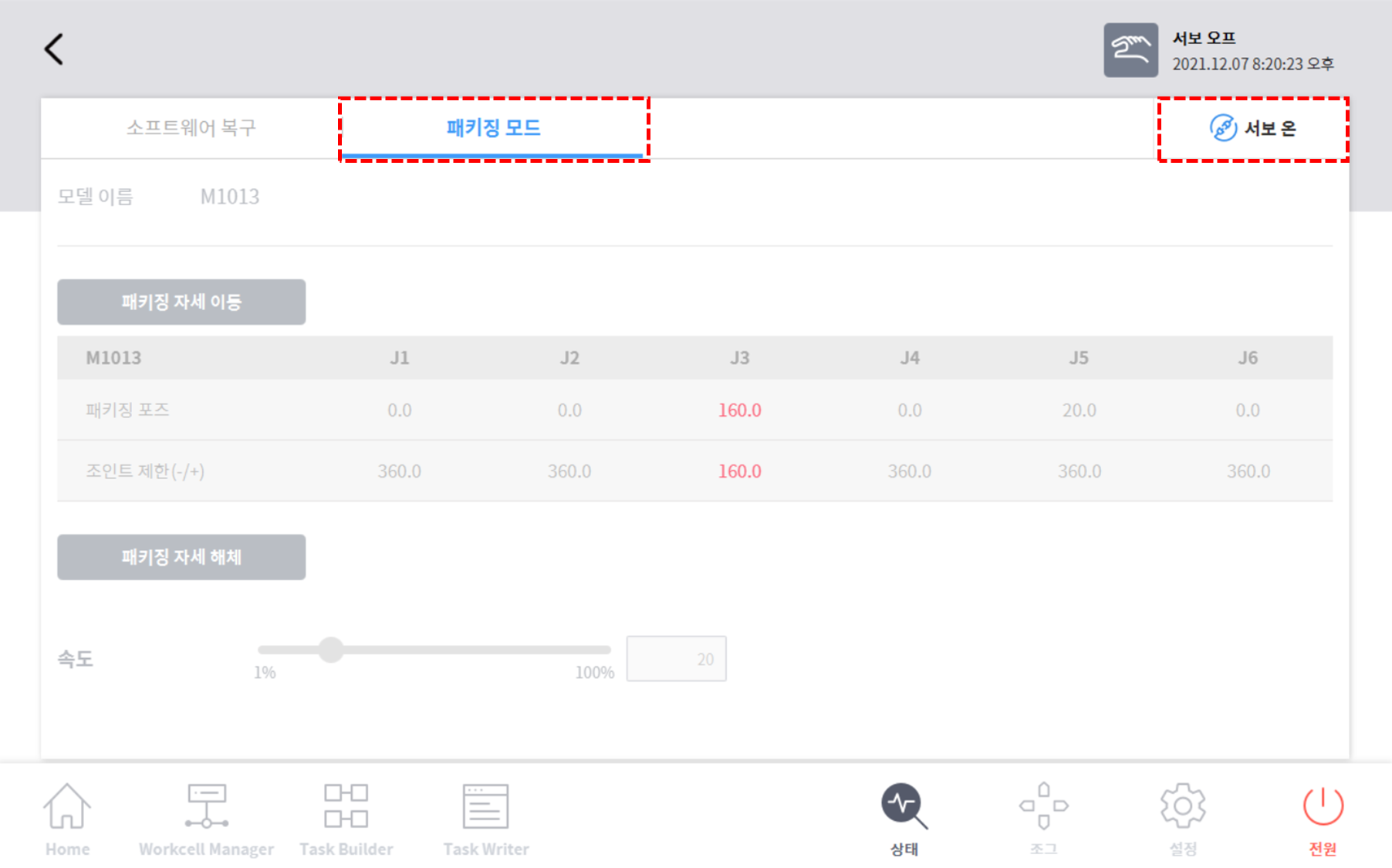
Selecteer het tabblad Packaging Mode .
Tik op de knop Servo aan .
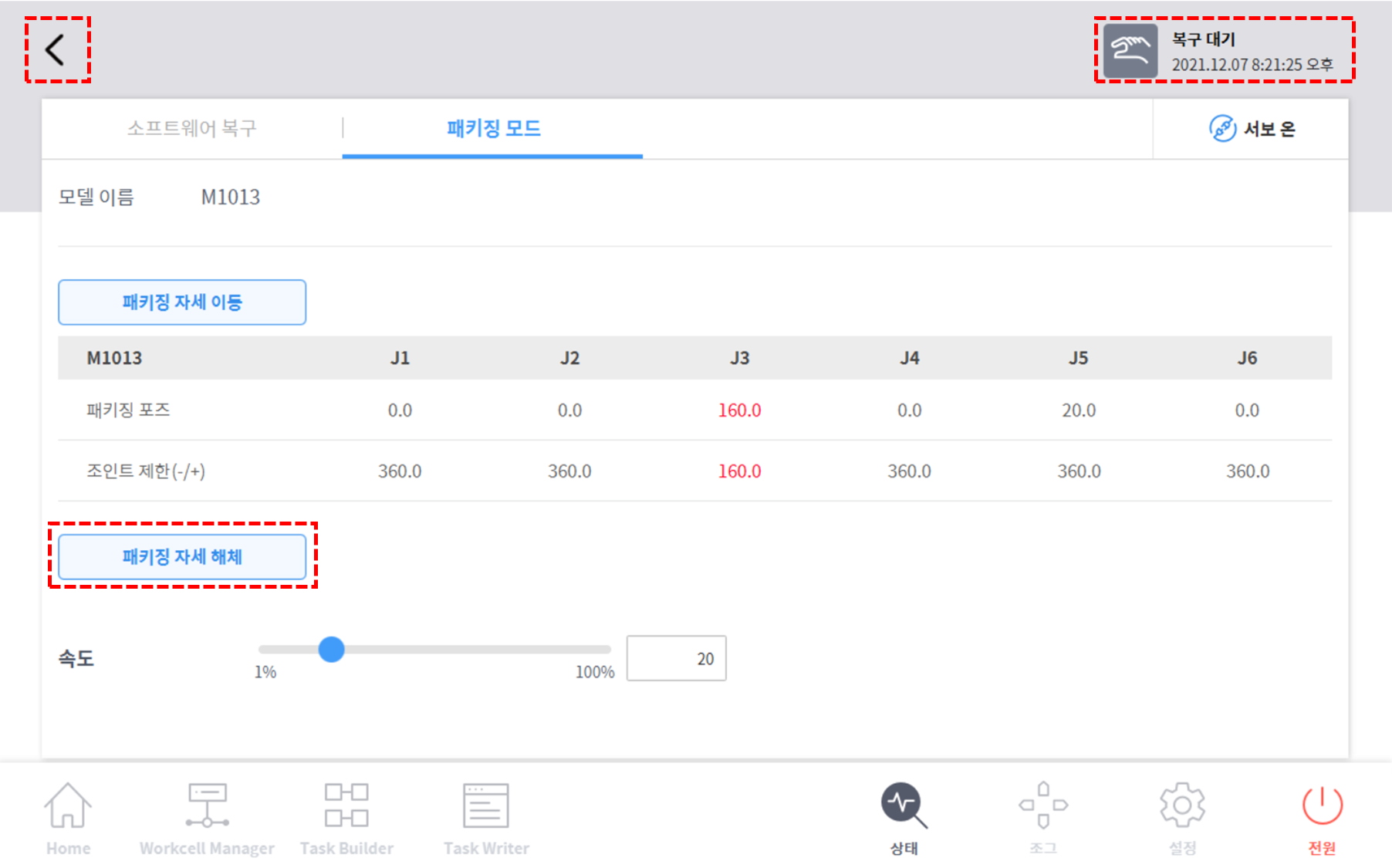
Het statusdisplay van de robot rechtsonder op het scherm van de handzender gaat van Safety Off naar Recovery Standby. Tik op de schakelknop Packaging Mode op het tabblad Packaging Mode .
Druk op de knop verpakking ontkoppelen en houd deze ingedrukt . De verpakkingsmodus van de robot is uitgeschakeld en de robot gaat naar de uitgangspositie. Wanneer de robot in de ruststand staat, beweegt deze niet verder.
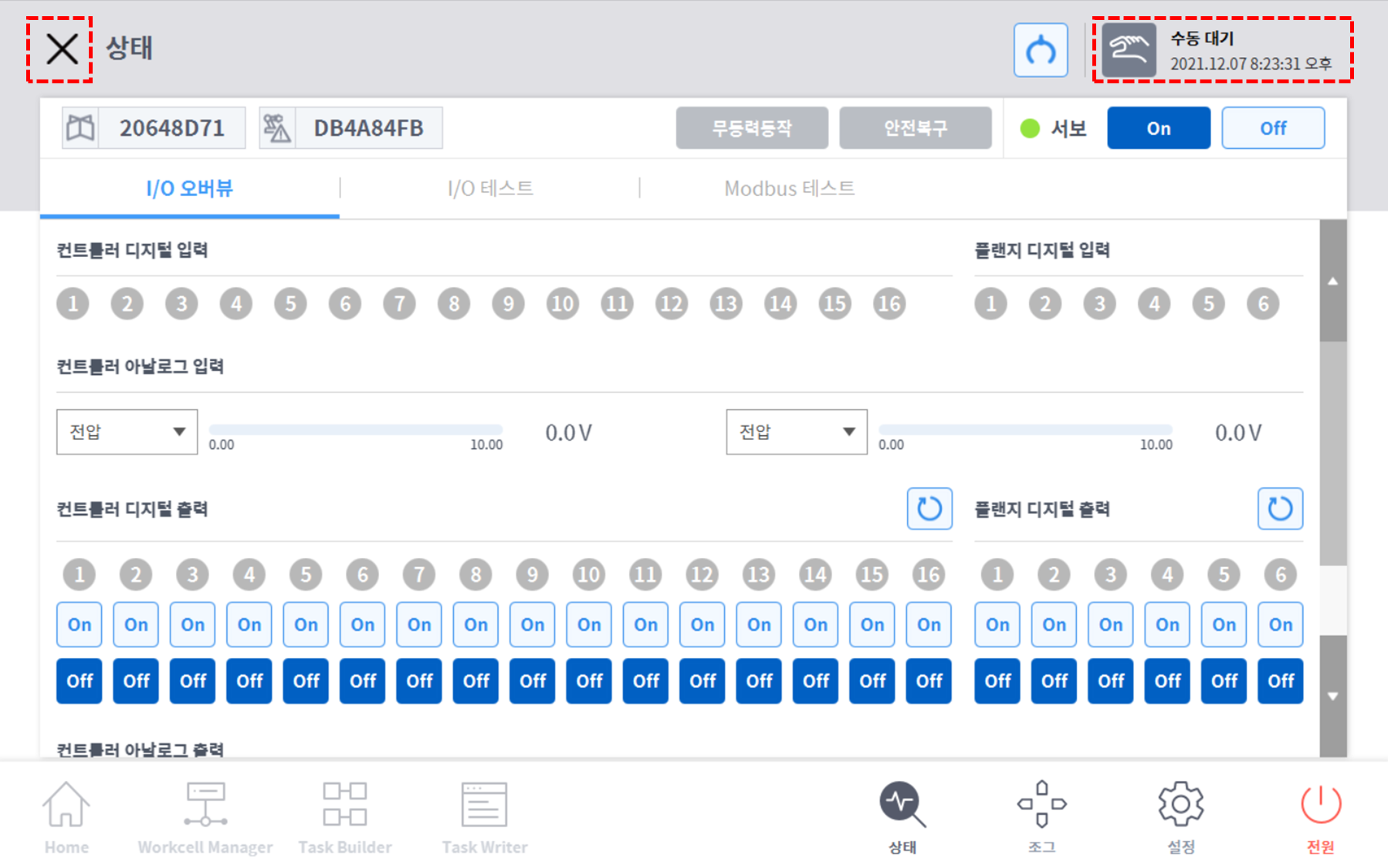
Nadat de robot in de uitgangspositie is geplaatst, tikt u op de knop linksboven in het scherm.
Het statusdisplay van de robot rechtsonder op de programmeerhanger verandert van herstel stand-by in Handmatige stand-by. De robot bevindt zich nu in een toestand waarin de gebruiker deze kan bedienen. Druk op de knop Sluiten in het statusscherm om het statusvenster te sluiten.
JavaScript errors detected
Please note, these errors can depend on your browser setup.
If this problem persists, please contact our support.