
Gereedschapsinstellingen
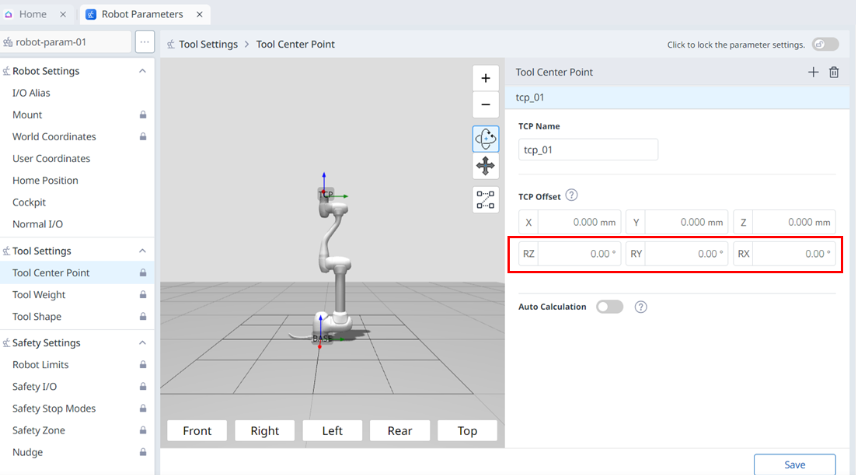
Middelpunt gereedschap
Bij het configureren van het middelpunt van het gereedschap (TCP) moeten ook de positie en de rotatiehoek op basis van de flenscoördinaten worden gedefinieerd. ime, de afstand vanaf het standaard beginpunt van de flenscoördinaat tot het gereedschapscentrum punt (TCP) in de X-, Y- en Z-richtingen kan niet worden ingesteld op meer dan 10000 mm. Let ook op: Force Control, Compliance Control en Direct Teaching-Point Fixation zijn alleen beschikbaar als de geconverteerde lengtes van X, Y en Z (![]() ) 300 mm of korter zijn.
) 300 mm of korter zijn.
Als het middelpunt van het gereedschap (TCP) is geconfigureerd met Auto Calculate, wordt de berekening alleen uitgevoerd op basis van de X-, Y- en Z-posities, zodat het nodig is om de rotatiehoek in te voeren. De rotatiehoek kan worden gedefinieerd met RZ, RY en RX en deze is gebaseerd op de „Euler Z-Y-Z” rotatiemethode.
De definities van de coördinaatas uitgedrukt met x, y, z en coördinaatas uitgedrukt met X, Y, Z zijn als volgt:
Coördinaatas van 'flenscoördinaat' (x, y, z): De coördinaatas richting van de 'flenscoördinaat' gedefinieerd aan het uiteinde van de flens is identiek aan de robotcoördinaat wanneer de robotverbindingshoek van de robot (0,0,0,0,0,0) is.
Coördinaatas van de "TCP-coördinaat" (X, Y, Z): Dit wordt ingesteld aan het uiteinde of op het werkpunt van het gereedschap dat op het uiteinde van de flens is aangebracht. Op dit moment wordt de rotatiehoek van de “TCP-coördinaat” gedefinieerd op basis van de „flenscoördinaat” in de volgorde 1) tot 3) van de volgende waarden:
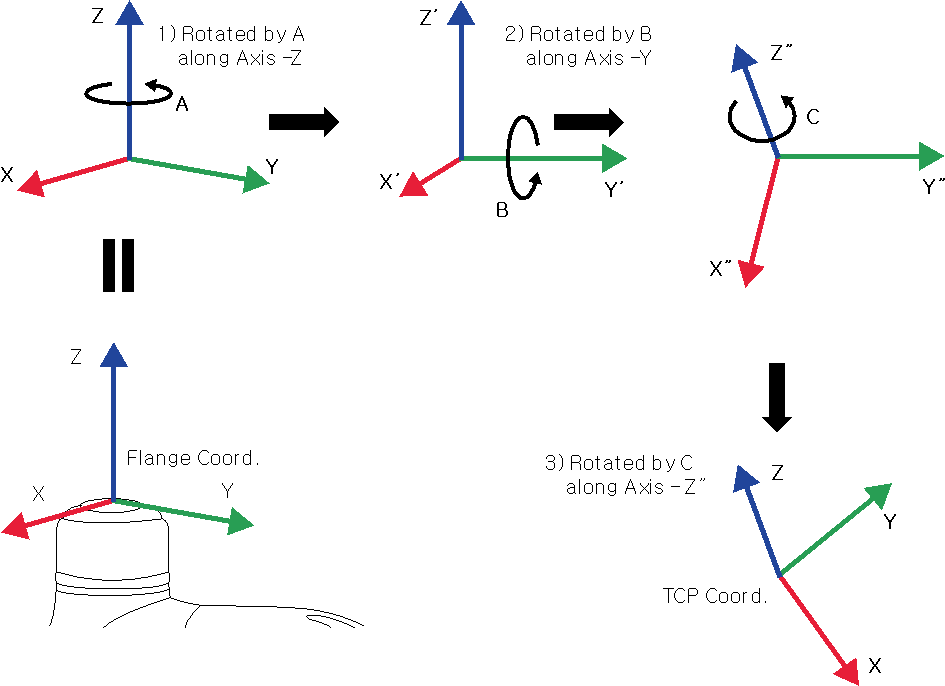
Roteer Een graden langs de z-as van de flenscoördinaat.
Roteer B graden langs de y'-as van de coördinaat geroteerd volgens 1).
Draai C graden langs de z'-as van de coördinaat gedraaid volgens 2).
Hier volgen enkele voorbeelden van het configureren van de TCP volgens de hierboven beschreven methode:
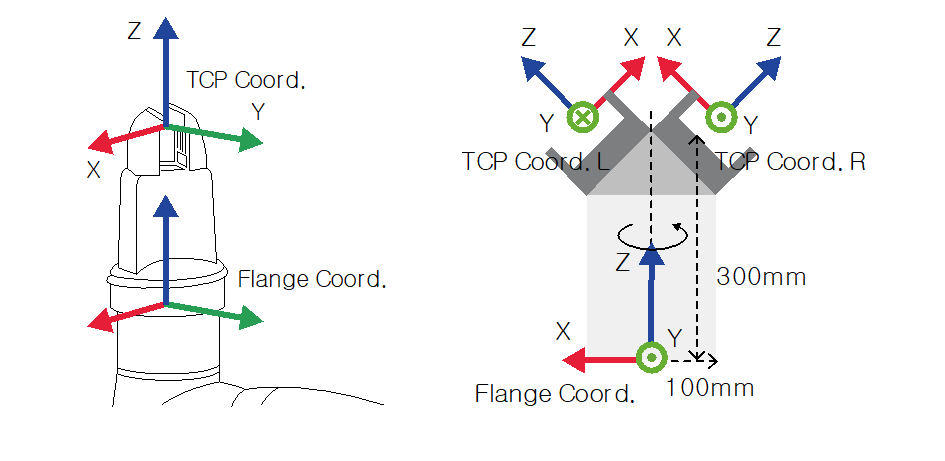
[X, Y, Z, A, B, C] = [0, 0, 100, 0, 0, 0]: Algemene grijper met alleen een Z-richtingsoffset (TCP Coord)
[X, Y, Z, A, B, C] = [100, 0, 300, 180, -45, 0]: Linker grijper met een hoek van 45 graden (TCP Coord. L)
[X, Y, Z, A, B, C] = [-100, 0, 300, 0, -45, 0]: Rechter grijper met een hoek van 45 graden (TCP Coord. R)
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Schakelknop vergrendelen | Wordt gebruikt om de ingestelde waarde te vergrendelen. Het veiligheidswachtwoord is vereist voor het wijzigen van de ingestelde waarde. |
| 2 | 3D-simulatie | Hier kunt u het geconfigureerde Tool Center Point simuleren. |
| 3 | Toevoegen | Met deze knop kunt u TCP toevoegen. |
| 4 | Bezig met verwijderen | Met deze knop kunt u de geselecteerde TCP verwijderen. |
| 5 | Opslaan | Met deze knop kunnen de instellingswaarden worden opgeslagen. |
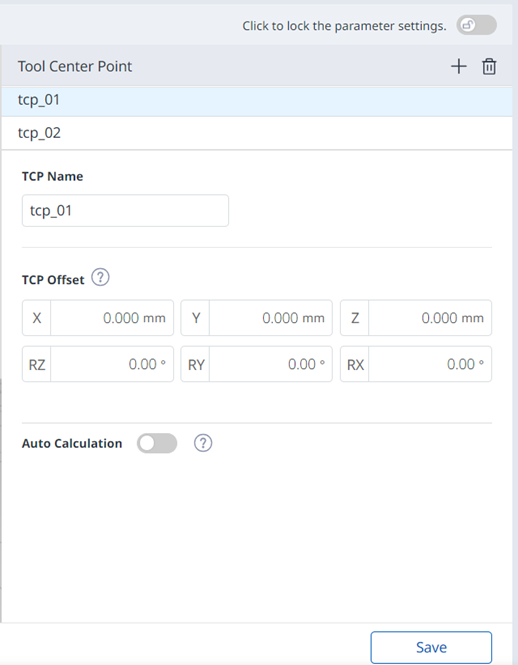
Wanneer de instellingen zijn vergrendeld, wordt het onderstaande scherm weergegeven.
Op dit moment wordt de geselecteerde TCP in blauw weergegeven, zoals hieronder wordt weergegeven.
Gewicht van gereedschap
U kunt het gewicht instellen van het gereedschap dat op de flens is gemonteerd door een gereedschapsgewicht toe te voegen. U kunt het gewicht van het gereedschap instellen door Robotparameters > Gereedschapsinstellingen > Gewicht gereedschap te selecteren.
Het gewicht van het gereedschap kan worden gemeten met behulp van de functie automatisch meten.
Het wordt aanbevolen om gereedschapsgewicht toe te voegen voor elk gereedschap met een werkstuk. Als het gewicht van het werkstuk te zwaar is, kan de robot het gewicht van het werkstuk herkennen als externe kracht. Dat komt omdat de robot deze externe kracht als een botsing bepaalt en stopt.
Wijzig bij het maken van een taak het gewicht volgens het proces om het gewicht van het gereedschap te wijzigen. Het is bijvoorbeeld mogelijk om een taak te configureren om het standaard gereedschapsgewicht te selecteren voordat u een werkstuk oppakt, en het gereedschapsgewicht met het werkstuk te selecteren nadat u een werkstuk hebt opgepakt.
Het geactiveerde gereedschapsgewicht item kan worden ingesteld als het standaard gereedschapsgewicht door op het pictogram gereedschap instellen (![]() ) boven op de inleerhanglamp te drukken.
) boven op de inleerhanglamp te drukken.
Set van de gereedschapsinstelling is hetzelfde als de set met andere opdrachten. De opdracht instellen kan worden gebruikt bij het wijzigen van het gewicht van het gereedschap terwijl een taak wordt uitgevoerd. Raadpleeg voor meer informatie Task Editor module .
Opmerking
Er kunnen maximaal vijftig verschillende gereedschapsgewichten worden geregistreerd.
In het geval van de M-serie wordt de automatische afstelling van de acceleratie uitgevoerd wanneer het maximale gewicht van het gereedschap het maximale gewicht van het gereedschap overschrijdt.
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Schakelknop vergrendelen | Wordt gebruikt om de ingestelde waarde te vergrendelen. Het veiligheidswachtwoord is vereist voor het wijzigen van de ingestelde waarde. |
| 2 | Toevoegen | Met deze knop kunt u een nieuw gereedschapsgewicht toevoegen. |
| 3 | Bezig met verwijderen | Met deze knop kunt u een gereedschapsgewicht verwijderen. |
| 4 | Gewichtslijst gereedschap | Een lijst met de geconfigureerde gewichten van het gereedschap. |
| 5 | Naam gewicht gereedschap | Hier kunt u een naam invoeren voor het gewicht van het gereedschap. |
| 6 | Beweging automatisch meten | Met deze knop kunt u de automatische meting uitvoeren. |
| 7 | Automatische meting | Met deze knop kunt u een optie selecteren en er een automatische meting voor uitvoeren. |
| 8 | Bewegingsselectie | U kunt de gewenste beweging selecteren uit de opties. |
| 9 | Selectie van het gebruik van gewicht | U kunt kiezen of u gewicht wilt gebruiken. Dit selectievakje is uitgeschakeld voor E-serie of A-serie zonder FPT-sensoren. |
| 10 | Invoer gewicht | Hier kunt u het gewenste gewicht invoeren. |
| 11 | Selectie van het gebruik van het zwaartepunt CX | Het gebruik van het zwaartepunt CX kan worden geselecteerd. |
| 12 | CX-ingang | CX kan worden ingevoerd. |
| 13 | Selectie van het gebruik van het zwaartepunt CY | Het gebruik van het zwaartepunt CY kan worden geselecteerd. |
| 14 | CY-invoer | CY kan worden ingevoerd. |
| 15 | Selectie van het gebruik van het zwaartepunt CZ | Het gebruik van het zwaartepunt CZ kan worden geselecteerd. |
| 16 | CZ-ingang | CZ kan worden ingevoerd. |
| 17 | Of traagheid moet worden gebruikt | Met dit selectievakje kunt u kiezen of u traagheid wilt gebruiken. |
| 18 | lxx-invoer | Er kan een lxx-vermelding voor traagheid worden ingevoerd. |
| 19 | Lyy-invoer | Er kan een lyy-ingang voor traagheid worden ingevoerd. |
| 20 | Lzz-invoer | Er kan een lzz-invoer voor traagheid worden ingevoerd. |
| 21 | Lxy-invoer | Er kan een lxy-invoer voor traagheid worden ingevoerd. |
| 22 | Lyz-invoer | Er kan een lyz-item voor traagheid worden ingevoerd. |
| 23 | Lzx-ingang | Er kan een lzx-invoer voor traagheid worden ingevoerd. |
| 24 | Opslaan | Met deze knop kunt u de instelwaarden opslaan. |
Gereedschapsvorm
De vorm van het gereedschap dat op de flens is geïnstalleerd, kan worden ingesteld door een gereedschapsvorm toe te voegen.
De vorm van het gereedschap kan worden ingesteld in de module Robotparameters > Tool Settings > Tool Shape. Zie voor meer informatie Tool Shape .
De robot bepaalt de status van de schending van de ruimtelimiet op basis van het TCP (Tool Center Point) van het robotuiteinde en het robotlichaam. Als de eigenlijke robot een gereedschapsvorm heeft die groter is dan de ingestelde TCP, moet een gereedschapsvorm worden toegevoegd om het werkstuk en gereedschap te beschermen.
Wees voorzichtig omdat de zone die de robot kan manoeuvreren kleiner wordt als de gereedschapsvorm te groot is ingesteld.
Het item gereedschapsvorm is alleen beschikbaar nadat het is geregistreerd (bevestigd) en de tuimelschakelaar is ingeschakeld. Het geactiveerde gereedschap vorm item kan worden ingesteld als de standaard gereedschapsvorm door op het pictogram gereedschap instellen (![]() ) boven op de leerhanger te drukken.
) boven op de leerhanger te drukken.
Set van de gereedschapsinstelling is hetzelfde als de set met andere opdrachten. De opdracht instellen kan worden gebruikt bij het wijzigen van de gereedschapsvorm terwijl een taak wordt uitgevoerd. Raadpleeg voor meer informatie Task Editor module.
Opmerking
Er kunnen maximaal vijftig verschillende gereedschapsvormen worden geregistreerd.
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Schakelknop vergrendelen | Wordt gebruikt om de ingestelde waarde te vergrendelen. Het veiligheidswachtwoord is vereist voor het wijzigen van de ingestelde waarde. |
| 2 | 3D-simulatie | Hier kunt u het resultaat van de geconfigureerde gereedschapsvorm 3D simuleren. |
| 3 | Naam gereedschapsvorm | De naam van het geconfigureerde hulpmiddel. |
| 4 | Vormformulier gereedschap | De vorm van het geconfigureerde gereedschap. |
| 5 | Bewerken van de vorm van het gereedschap | Met deze knop kunt u de geconfigureerde gereedschapsvorm bewerken. |
| 6 | Gereedschapsvorm wordt verwijderd | Met deze knop kunt u de geselecteerde gereedschapsvorm verwijderen. |
| 7 | Gereedschapsvorm toevoegen | U kunt een gereedschapsvorm toevoegen. |
| 8 | Bezig met toepassen | Met deze knop kunt u de gereedschapsvorm toepassen nadat u deze hebt ingesteld. |
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Gereedschapsvorm | Dit geeft aan dat dit deelvenster een pop-upvenster met de vorm van gereedschap is. |
| 2 | Een naam invoeren | Dit is een veld waarin de naam van de gereedschapsvorm kan worden ingevoerd. |
| 3 | Waarschuwingsbericht | Let op bij het instellen |
| 4 | Nieuwe kuboid toevoegen | Met deze knop kunt u een kubus-id toevoegen. |
| 5 | Nieuwe bol toevoegen | Met deze knop kunt u een bol toevoegen. |
| 6 | Nieuwe capsule toevoegen | Met deze knop kunt u een capsule toevoegen. |
| 7 | Annuleren | Met deze knop kunt u de instelling annuleren. |
| 8 | Bevestigen | Met deze knop kunt u de instelling bevestigen. |
Zodra de kubus/bol/capsule is toegevoegd, wordt het display als volgt weergegeven.