Wat is een robot?
Functionele limieten van elke robotserie
De verschillende robotseries (A, AS, E, M/H, P-serie) beperken het gebruik van functies als volgt:
Huidig gebaseerd: Stroom van de motor op elke verbinding wordt gebruikt.
FTS-gebaseerd : Er wordt een FTS (krachtkoppelsensor) aan het uiteinde van de robot gebruikt.
JTS-gebaseerd : JTS (joint torque sensor) op elke verbinding wordt gebruikt.
Functies | A/E-serie (op stroom gebaseerd) | A-serie S (stroom, FTS-gebaseerd) | M-serie (JTS-gebaseerd) | H-serie (JTS-gebaseerd) | P-serie (JTS-gebaseerd) |
|---|---|---|---|---|---|
Direct onderwijzen
| O | O (op stroom gebaseerd) | O | O | O |
Direct onderwijzen
| X | O (gebaseerd op FTS) | O | O | O |
Botsingsdetectie | O | O (op stroom gebaseerd) | O | O | O |
Meting van de installatiepositie | X | O (gebaseerd op FTS) | O | X (de robot kan alleen op de vloer worden geïnstalleerd) | X (de robot kan alleen op de vloer worden geïnstalleerd) |
Meting van het gewicht van het gereedschap | X | O (gebaseerd op FTS) | O | O | O |
Gewichtsmeting werkstuk | X | O (gebaseerd op FTS) | O | O | O |
Functie voor verschuiven | X | X | O | O | O |
Forceer controle | O (instelling alleen beschikbaar in drie vertaalrichtingen, exclusief rotatie) | O (gebaseerd op FTS) | O | O | O |
Controle op naleving | O (instelling alleen beschikbaar in drie vertaalrichtingen, exclusief rotatie) | O (gebaseerd op FTS) | O | O | O |
Functionele limieten van de krachtbewaking voor elke robotserie
De leerhanglamp en DART-Studio kunnen worden gebruikt om krachtgegevens te bewaken. Het DRL commando (check_force_condition()) kan ook gebruikt worden om krachtgegevens extern te controleren.
Als de palletiseermodus is ingesteld op „AAN”: Dezelfde besturings-/bewakingsfuncties die in de UITGESCHAKELDE stand beschikbaar zijn, behalve voor H- en P-serie-robots.
Functies | A/E-serie (op stroom gebaseerd) | A-serie S (op stroom en op FTS gebaseerd) | M-serie (JTS-gebaseerd) | H-serie (JTS-gebaseerd) | P-serie (JTS-gebaseerd) |
|---|---|---|---|---|---|
Forceer controle | O (instelling alleen beschikbaar in drie vertaalrichtingen, exclusief rotatie) | O (FTS-gebaseerd) | O | O | O |
O (als de palletiseermodus is ingesteld op „AAN”: Kracht controle uitgang beperkt (basis Rx, Ry oriëntatie) 1) ) | O (als de palletiseermodus is ingesteld op „AAN”: Kracht controle uitgang beperkt (basis Rx, Ry oriëntatie) 1) ) | ||||
Nalevingscontrole | O (instelling alleen beschikbaar in drie vertaalrichtingen, exclusief rotatie) | O (FTS-gebaseerd) | O | O | O |
O (als de palletiseermodus is ingesteld op „AAN”: Nalevingscontrole uitgang beperkt (basis Rx, Ry oriëntatie) 1) ) | O (als de palletiseermodus is ingesteld op „AAN”: Nalevingscontrole uitgang beperkt (basis Rx, Ry oriëntatie) 1) ) | ||||
Krachtbewaking (Hangend onderricht) | X | O (FTS-gebaseerd) | O (krachtwaarde van „0” weergegeven voor de sectie singulariteit) | O (krachtwaarde van „0” weergegeven voor de sectie singulariteit) | O (krachtwaarde van „0” weergegeven voor de sectie singulariteit) |
O (als de palletiseermodus is ingesteld op „AAN”: 4-graden vrijheid voor de basis (x, y, z, RZ)) | O (als de palletiseermodus is ingesteld op „AAN”: 4-graden vrijheid voor de basis (x, y, z, RZ)) | ||||
Krachtbewaking (DART-Studio) | O (krachtwaarde van „0” weergegeven voor de sectie singulariteit) | O (FTS-gebaseerd) | O (krachtwaarde van „0” weergegeven voor de sectie singulariteit) | O (krachtwaarde van „0” weergegeven voor de sectie singulariteit) | O (krachtwaarde van „0” weergegeven voor de sectie singulariteit) |
O (als de palletiseermodus is ingesteld op „AAN”: 4-graden vrijheid voor de basis (x, y, z, RZ)) | O (als de palletiseermodus is ingesteld op „AAN”: 4-graden vrijheid voor de basis (x, y, z, RZ)) | ||||
Krachtbewaking (Bij gebruik van DRL commando's: | O (krachtwaarde van „0” weergegeven voor de sectie singulariteit) | O (FTS-gebaseerd) | O (krachtwaarde van „0” weergegeven voor de sectie singulariteit) | O (krachtwaarde van „0” weergegeven voor de sectie singulariteit) | O (krachtwaarde van „0” weergegeven voor de sectie singulariteit) |
O (als de palletiseermodus is ingesteld op „AAN”: 4-graden vrijheid voor de basis (x, y, z, RZ)) | O (als de palletiseermodus is ingesteld op „AAN”: 4-graden vrijheid voor de basis (x, y, z, RZ)) |
Uitvoerlimiet voor regeling (basis Rx, Ry-richting): De kracht- of nalevingscontrolewaarden die overeenkomen met de kracht- of nalevingscontrolewaarden die overeenkomen met de basis Rx, Ry-oriëntatie worden niet uitgevoerd. Het invoeren van de kracht- of nalevingscontrolewaarde van de relevante as (Base Rx, Ry) wordt genegeerd als „0”.
Overzicht van Singularity
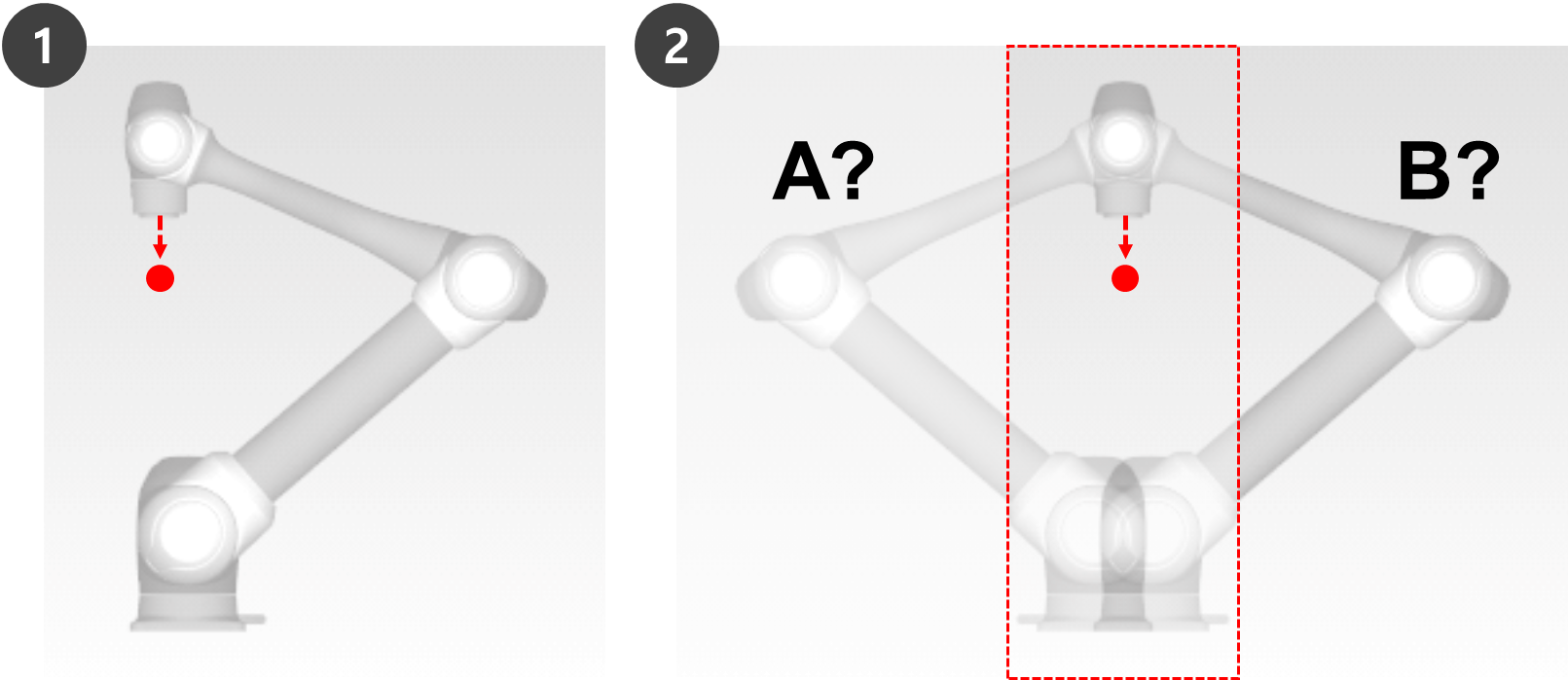
Singulariteit in een robot met meerdere gewrichten verwijst naar een positie (of punt in een robot met meerdere gewrichten verwijst naar een positie (of punt) waarbij de robot moeite heeft om zijn volgende houding te berekenen tijdens het bewegen. Robots met meerdere gewrichten berekenen elke gewrichtshoek tijdens de beweging op basis van het robotuiteinde
Bijvoorbeeld in afb. 1 wanneer de robot zich naar de rode stip verplaatst, kan de robot niet bepalen of de gewrichten moeten worden bewogen om stand A of positie B in te stellen, zoals weergegeven in afb. 2. Deze positie (of punt) wordt de singulariteit genoemd.
Bijna een singulariteit, robotbeweging is niet vloeiend in termen van vlak, punt en lijn, robot einde lineaire beweging kan niet worden gehandhaafd en positie fout tijdens de regeling kan toenemen. Singulariteit treedt op in 3 gevallen, zoals weergegeven in de volgende afbeelding, ook wanneer de robotverbindingen een lijn vormen.
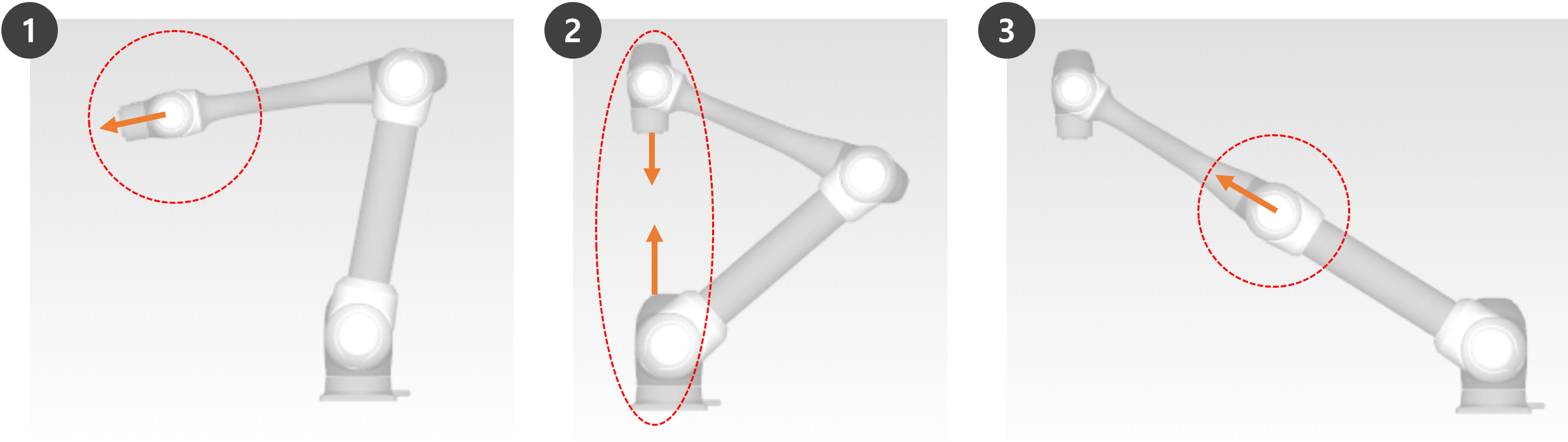
Singulariteit van pols: Wanneer de robotpols een lijn vormt terwijl as 5 0° nadert
In vergelijking met een menselijke arm komen de assen 4, 5 en 6 overeen met het polsgewricht.
Singulariteit schouder: Wanneer assen 1 en 6 op dezelfde lijn staan
In vergelijking met een menselijke arm komen de assen 1 en 2 overeen met het schoudergewricht.
Elleboog Singulariteit: Wanneer de robot een lijn vormt terwijl as 3 0° nadert
In vergelijking met een menselijke arm komt as 3 overeen met de elleboog.
Voorzichtig
Handmatige en automatische bewerkingen die bewegen met gezamenlijke rotatie worden niet beïnvloed door singulariteit.
Taakverplaatsing, MoveL-opdracht, enz.
Singulariteit treedt alleen op tijdens handmatige en automatische werking, waarbij de robot de lineaire beweging beëindigt.
Gezamenlijke beweging, MoveJ-opdrachten, enz.
In de singulariteitzone is geforceerde controle of compliancecontrole niet beschikbaar.
Aangezien de rotatiesnelheid van bepaalde assen snel toeneemt wanneer een lineaire beweging een singulariteit passeert, is het mogelijk dat een overschrijding van de Joint Speed Limit of Joint Angle Limit optreedt.
Hoe je Singularity kunt vermijden
Doosan Robotics robots bieden opties om singulariteiten tijdens motion control te vermijden. Het wordt echter aanbevolen om een taak te configureren die geen uitzonderingen maakt met behulp van gezamenlijke bewegingsopdrachten zoals MoveJ in singulariteitzones.
Dit zijn de opties om singulariteit te vermijden die Doosan Robot biedt:
Automatisch te vermijden: Voert beweging uit door singulariteiten te vermijden. De robotbeweging kan echter afwijken van het verwachte pad.
Prioriteit van pad: Behoudt pad en snelheid, maar kan stoppen als gevolg van een fout in de buurt van een singulariteit.
Variabel toerental: Handhaaft het pad, maar vertraagt bijna een singulariteit.
Overzicht van Euler-hoek
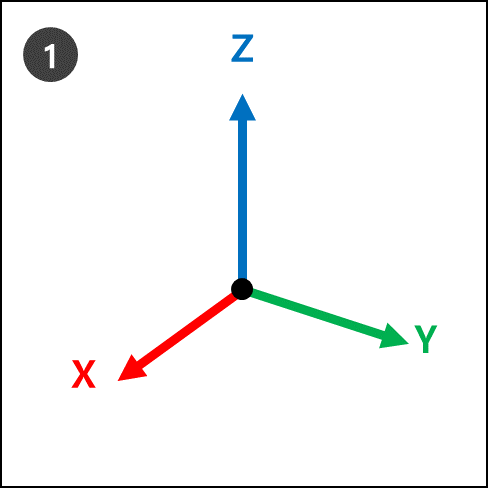
Euler Angle is een manier om de hoeken van X-, Y- en Z-assen uit te drukken, die loodrecht onder elkaar staan in de richting van het object. A, B en C verwijzen naar de sequentiële rotatiehoeken. Elke robotfabrikant definieert deze A, B en C rotatievolgorde anders, zoals RZ-Ry-RZ, RZ-Ry-Rx of Rx-Ry-RZ.
Bijvoorbeeld RZ-Ry-Rx . Hier betekent RZ de rotatie in de Z-as, Ry de rotatie in de Y-as en Rx de rotatie in de X-as. RZ kan worden uitgedrukt als hoek A, Ry als hoek B en Rx als hoek C om de huidige draairichting van een object aan te geven. Merk op dat zodra de rotatie plaatsvindt in de richting van de Z-as vanuit de coördinaten, er rotaties worden gemaakt op basis van nieuwe coördinaten.
Dit kan worden gevisualiseerd met stap 1 t/m 4.
 |
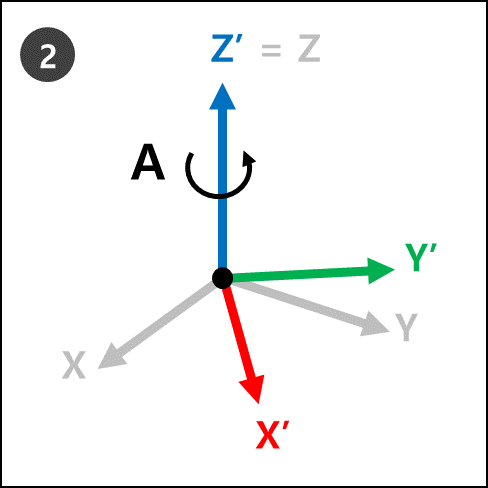 |
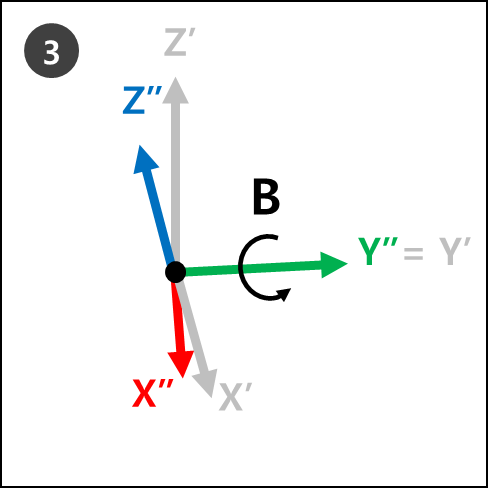 |
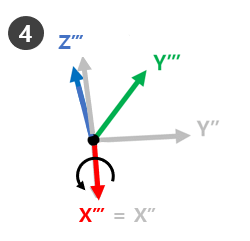 |
De nieuwe coördinaten (Z''', Y''', X''' van stap 4 verwijzen naar de huidige robotrotatie wanneer Euler Angles A, B en C worden toegepast.
Dit kan gemakkelijk met de rechterhand worden gevisualiseerd. Maak de volgende pose met je rechterhand. Dit wordt de rechterregel genoemd. Als u de duim (X-as), wijsvinger (Y-as) en middelvinger (Z-as) loodrecht op elkaar laat staan, worden coördinaten gecreëerd die bestaan uit X-, Y- en Z-assen.
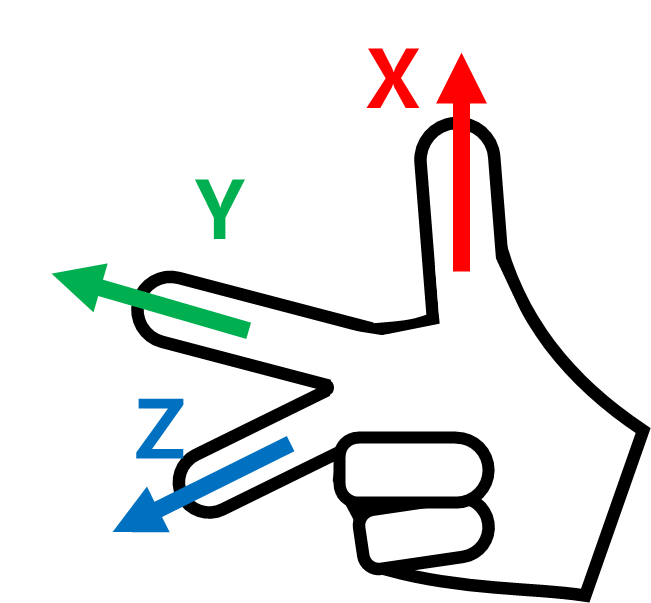
Maak vervolgens de rechtse regel cartesiaanse pose en maak rotaties RZ, Ry en Rx in opeenvolgende volgorde.
RZ: Draai de middelvinger (Z-as) Een graden.
Ry: Draai de wijsvinger (Y-as) met B graden.
RX: Draai de duim (X-as) met C graden.
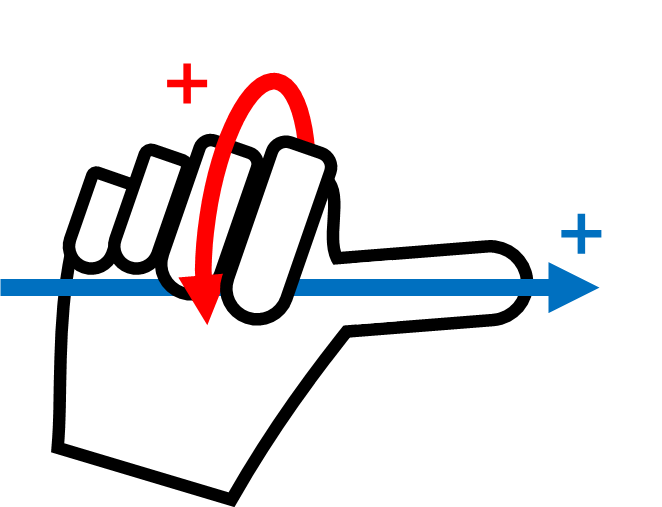
Opmerking
De + draairichting van de + draairichting van A, B en C is de richting van vier vingers behalve de duim, wanneer de duim naar de + richting wijst en de vier vingers vastgeklemd zijn. Dit wordt de wet van de schroef met de klok mee genoemd.