Robot grenzen en veiligheid
Instelling robot limieten
In Robot Limits kunnen verschillende limieten met betrekking tot de robot worden ingesteld. Deze limieten worden gebruikt om ervoor te zorgen dat de robot veilig werkt binnen de ingestelde limieten.
Robotlimieten kunnen worden ingesteld in Robotparameter > Veiligheidsinstellingen > Robotlimieten.
Voor een gedetailleerde beschrijving van elke limiet, zie Robotlimieten.
Robot Limits zijn grotendeels onderverdeeld in 3 categorieën. Elke categorie omvat de volgende schermen en functies.
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Schakelknop vergrendelen | Wordt gebruikt om de ingestelde waarde te vergrendelen. Het veiligheidswachtwoord is vereist voor het wijzigen van de ingestelde waarde. |
| 2 | TCP/robot | Grote classificatie van robot limieten. |
| 3 | Reset | Gebruikt om instellingen te resetten. |
| 4 | Kracht | Wordt gebruikt om de kracht in te stellen. |
| 5 | Macht | Wordt gebruikt om de voeding in te stellen. |
| 6 | Snelheid | Gebruikt om de snelheid in te stellen. |
| 7 | Momentum | Wordt gebruikt om de dynamiek te bepalen. |
| 8 | Botsing | Wordt gebruikt om de botsing in te stellen. |
| 9 | Opslaan | Wordt gebruikt om de toepasselijke instelling op te slaan. |
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Schakelknop vergrendelen | Wordt gebruikt om de ingestelde waarde te vergrendelen. Het veiligheidswachtwoord is vereist voor het wijzigen van de ingestelde waarde. |
| 2 | Snelheid van de verbinding | Grote classificatie van robot limieten. |
| 3 | Reset | Gebruikt om instellingen te resetten. |
| 4 | J1 | Hiermee kunt u de instellingen voor de modi Normaal en gereduceerd instellen. |
| 5 | J2 | Hiermee kunt u de instellingen voor de modi Normaal en gereduceerd instellen. |
| 6 | J3 | Hiermee kunt u de instellingen voor de modi Normaal en gereduceerd instellen. |
| 7 | J4 (inactief voor modellen van de P-serie) | Hiermee kunt u de instellingen voor de modi Normaal en gereduceerd instellen. |
| 8 | J5 | Hiermee kunt u de instellingen voor de modi Normaal en gereduceerd instellen. |
| 9 | J6 | Hiermee kunt u de instellingen voor de modi Normaal en gereduceerd instellen. |
| 10 | Opslaan | Wordt gebruikt om de toepasselijke instelling op te slaan. |
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Schakelknop vergrendelen | Wordt gebruikt om de ingestelde waarde te vergrendelen. Het veiligheidswachtwoord is vereist voor het wijzigen van de ingestelde waarde. |
| 2 | Verbindingshoek | Grote classificatie van robot limieten. |
| 3 | Reset | Gebruikt om instellingen te resetten. |
| 4 | J1 | Hiermee kunt u de instellingen voor de modi Normaal en gereduceerd instellen. |
| 5 | J2 | Hiermee kunt u de instellingen voor de modi Normaal en gereduceerd instellen. |
| 6 | J3 | Hiermee kunt u de instellingen voor de modi Normaal en gereduceerd instellen. |
| 7 | J4 (inactief voor modellen van de P-serie) | Hiermee kunt u de instellingen voor de modi Normaal en gereduceerd instellen. |
| 8 | J5 | Hiermee kunt u de instellingen voor de modi Normaal en gereduceerd instellen. |
| 9 | J6 | Hiermee kunt u de instellingen voor de modi Normaal en gereduceerd instellen. |
| 10 | Opslaan | Wordt gebruikt om de toepasselijke instelling op te slaan. |
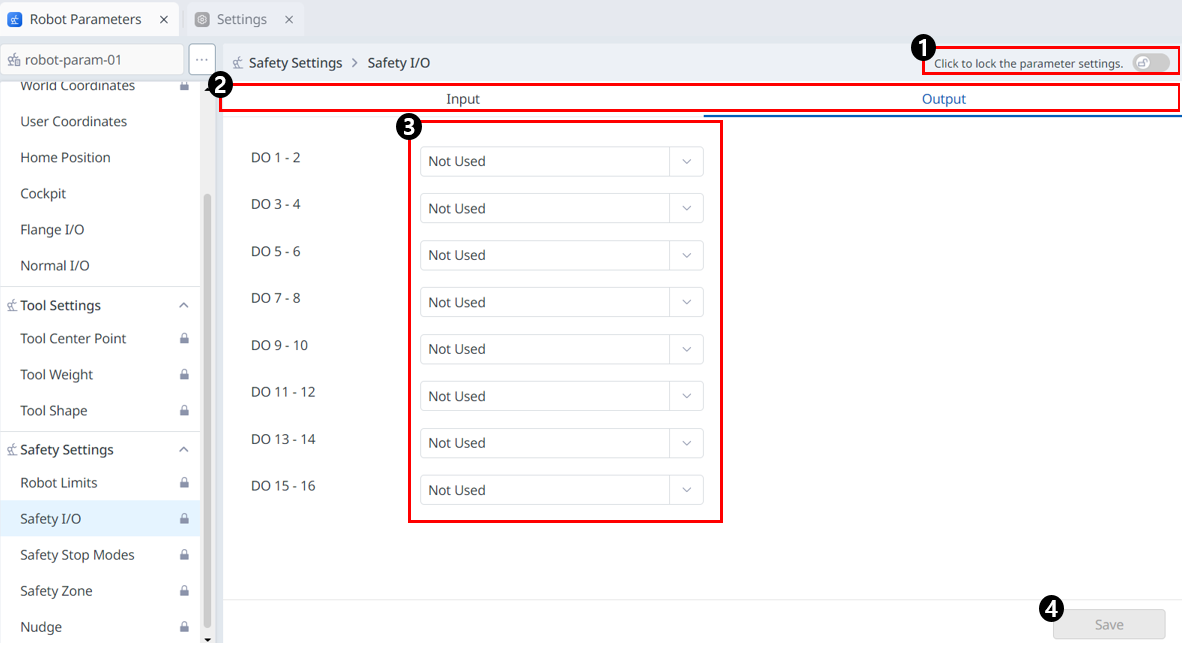
I/O veiligheid
Deze functie wordt gebruikt om veiligheidsgerelateerde signalen naar de redundante klemmen in- en uit te voeren. Als een van de veiligheidsingangs-/uitgangssignalen een ander redundant signaal heeft, wordt een open circuit of hardwarestoring vastgesteld en wordt de robot in de STO-stopmodus gestopt.
Als u de veiligheids-I/O wilt instellen, selecteert u Robotparameters > Veiligheidsinstellingen > veiligheids-I/O .
Zie I/O veiligheidssignaal voor meer informatie .
Invoer
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Schakelknop vergrendelen | Wordt gebruikt om de ingestelde waarde te vergrendelen. Het veiligheidswachtwoord is vereist voor het wijzigen van de ingestelde waarde. |
| 2 | Ingang/uitgang | U kunt beide ingangen/uitgangen selecteren om in te stellen. |
| 3 | Signaalinstelling | Opties die voor elke poort zijn ingesteld. Niet gebruikt |
| 4 | Selecteer of u het signaal wilt negeren, afhankelijk van de status van de robot | Als u het signaal 'Beveiligingsstop' selecteert, kunt u instellen of u het geselecteerde signaal wilt negeren in de robotstatussen 'HANDMATIG, HERSTEL, HGC'. |
| 5 | Vertragingssnelheid instellen | U kunt de vertragingssnelheid instellen. Deze kan tussen 0 en 100 liggen. |
| 6 | Opslaan | Met deze knop kunt u de ingevoerde instelling opslaan. |
Uitvoer
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Schakelknop vergrendelen | Wordt gebruikt om de ingestelde waarde te vergrendelen. Het veiligheidswachtwoord is vereist voor het wijzigen van de ingestelde waarde. |
| 2 | Ingang/uitgang | U kunt beide ingangen/uitgangen selecteren om in te stellen. |
| 3 | Signaalinstelling | Opties die voor elke poort zijn ingesteld. Niet gebruikt |
| 4 | Opslaan | Met deze knop kunt u de ingevoerde instelling opslaan. |
Instellingen van de modi voor de veiligheidsstop
De typen veiligheidsaanslagen kennen en de veiligheidsstop in- en uitschakelen.
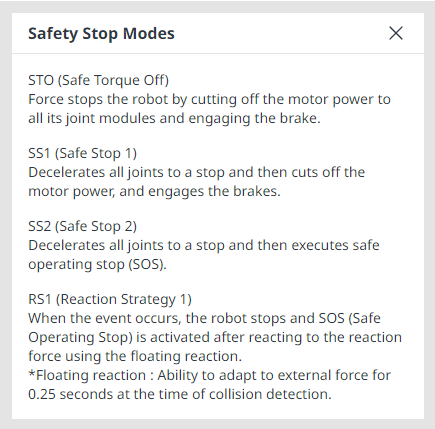
Soorten veiligheidsstops
De volgende stopmodi zijn beschikbaar om de veiligheid van de gebruiker te waarborgen:
STO (veilig uitschakelen koppel): Stopt servo uit (motorvoeding wordt onmiddellijk uitgeschakeld)
SS1 (veilige stop 1): Servo uit na maximale vertraging stoppen
SS2 (veilige stop 2): Stand-by na maximale vertraging stoppen (pauze)
RS1: Bij een botsing, voldoet aan de tegenovergestelde richting van de botsing en gaat dan naar stand-by (kan alleen worden ingesteld in Collision Detection/TCP Force Limit violation)
Doosan Robotics robots hebben twee soorten veiligheidsstopfuncties. De noodstop wordt gebruikt voor algemene noodsituaties en de robot kan weer in bedrijf worden genomen met Servo aan nadat de noodstop is losgelaten. In geval van een veiligheidsstop kan de robot weer in bedrijf worden genomen door de oorzaak van de veiligheidsstop op te lossen en de stop los te laten.
Noodstop: Hiermee wordt de stopmodus ingesteld wanneer de noodstopknop van de inleerhanglamp of een extra geïnstalleerd extern apparaat wordt geactiveerd
Deze wordt geactiveerd wanneer de noodstopschakelaar van de inleerhanglamp of de schakelaar die is aangesloten op de TBSFT EM-terminal wordt ingedrukt.
Alleen STO of SS1 kan worden geselecteerd.
Veiligheidsstop: Hiermee wordt de stopmodus ingesteld wanneer de extern aangesloten beveiligingsapparatuur wordt geactiveerd
Deze wordt geactiveerd wanneer de beschermende uitrusting die is aangesloten op de TBSFT PR-terminal wordt geactiveerd.
Zie Veiligheidsfuncties voor meer informatie over de functies van de veiligheidsstop.
De veiligheidsstop in-/uitschakelen
Druk op de noodstopknop op de leerhanglamp of activeer de veiligheidsvoorziening die is aangesloten op de veiligheids-I/O om de noodstop te activeren. Veiligheidsvoorzieningen kunnen worden aangesloten op de noodstop of de veiligheidsstop via Robotparameters > Veiligheidsinstellingen > I/O -functies van het scherm voor het leren van de hanglamp.
Raadpleeg Controller I/O aansluiten voor meer informatie over het aansluiten van een veiligheidsinrichting op veiligheids-I/O .
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Schakelknop vergrendelen | Wordt gebruikt om de ingestelde waarde te vergrendelen. Het veiligheidswachtwoord is vereist voor het wijzigen van de ingestelde waarde. |
| 2 | Informatiebericht | Een bericht met informatie die nodig is voor het instellen. |
| 3 | Reset | Een knop om de instellingen opnieuw in te stellen. |
| 4 | Noodstop | Er kan een veiligheidsstop worden geselecteerd voor gebruik voor het betreffende item. De vervolgkeuzemenu's omvatten: STO SS1 |
| 5 | Veiligheidsstop | Er kan een veiligheidsstop worden geselecteerd voor gebruik voor het betreffende item. De vervolgkeuzemenu's omvatten: SS1 SS2 |
| 6 | Overschrijding limiet gewrichtshoek | Er kan een veiligheidsstop worden geselecteerd voor gebruik voor het betreffende item. De vervolgkeuzemenu's omvatten: STO SS1 SS2 |
| 7 | Overschrijding gezamenlijke snelheidslimiet | Er kan een veiligheidsstop worden geselecteerd voor gebruik voor het betreffende item. De vervolgkeuzemenu's omvatten: STO (behalve voor H/P-serie) SS1 SS2 |
| 8 | Overschrijding koppellimiet gewricht | Alleen STO is beschikbaar. |
| 9 | Botsingsdetectie | Er kan een veiligheidsstop worden geselecteerd voor gebruik voor het betreffende item. De vervolgkeuzemenu's omvatten: STO (behalve voor H/P-serie) SS1 SS2 RS1 |
| 10 | Overschrijding van limiet TCP-robotpositie | Er kan een veiligheidsstop worden geselecteerd voor gebruik voor het betreffende item. De vervolgkeuzemenu's omvatten: STO SS1 SS2 |
| 11 | Overschrijding TCP-oriëntatielimiet | Er kan een veiligheidsstop worden geselecteerd voor gebruik voor het betreffende item. De vervolgkeuzemenu's omvatten: STO (behalve voor H/P-serie) SS1 SS2 |
| 12 | Overschrijding TCP-snelheidslimiet | Er kan een veiligheidsstop worden geselecteerd voor gebruik voor het betreffende item. Het vervolgkeuzemenu bevat het volgende: STO (behalve voor H/P-serie) SS1 SS2 |
| 13 | Overschrijding TCP-limiet forceren | Er kan een veiligheidsstop worden geselecteerd voor gebruik voor het betreffende item. De vervolgkeuzemenu's omvatten: STO (behalve voor H/P-serie) SS1 SS2 |
| 14 | Overschrijding van Momentum Limit | Er kan een veiligheidsstop worden geselecteerd voor gebruik voor het betreffende item. De vervolgkeuzemenu's omvatten: STO (behalve voor H/P-serie) SS1 SS2 |
| 15 | Overschrijding van mechanische limiet | Er kan een veiligheidsstop worden geselecteerd voor gebruik voor het betreffende item. De vervolgkeuzemenu's omvatten: STO (behalve voor H/P-serie) SS1 SS2 |
| 16 | Opslaan | Met deze knop kunt u de instelwaarden opslaan. |
Opmerking
Het volgende pop-upvenster verschijnt in het informatiebericht: