
Herstelmodule
Herstelmodule: Als er een fout is met een voortdurende schending van de veiligheid of als een robot moet worden ingepakt voor transport, kan de gebruiker de Safety Recovery Mode gebruiken om de positie en hoek van de robot te configureren.

Tik op de knop herstel onderaan om toegang te krijgen tot de herstelmodule.
Softwareherstel: Als in de status Servo uit een veiligheidsfout optreedt die wordt veroorzaakt door positiegerelateerde veiligheidsovertredingen, zoals de robot die het bedieningsgebied verlaat of verboden gebieden overtreedt, of als er continu kracht wordt uitgeoefend wanneer de robot wordt gestopt vanwege botsingen met een vast object, kan Servo aan of Jog niet worden ingesteld, zelfs niet wanneer wordt geprobeerd de robot terug te zetten naar een normale status met behulp van het programma Jog of. In dergelijke gevallen wordt de modus Software Recovery gebruikt om de robot terug te zetten naar de normale modus.
Verpakkingsmodus: Voor het verpakken en transporteren van de robot kan de robot worden ingesteld op vooraf gedefinieerde waarden (die verder gaan dan de normale bedrijfshoek limiet) voor transport.
Als de servo is ingeschakeld wanneer de herstelmodule wordt gestart, verschijnt het volgende pop-upvenster en wordt de servo automatisch uitgeschakeld.
Softwareherstelmodus gebruiken
Herstelmodus voor software
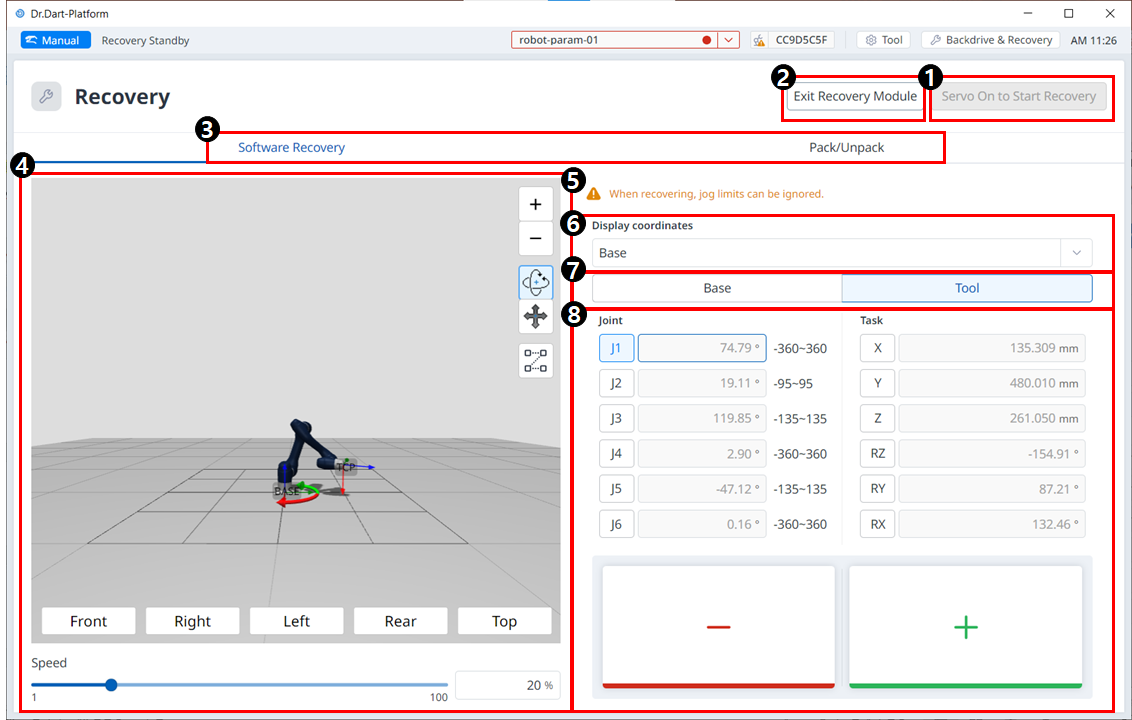
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Servo aan om herstel te starten | Dit is een knop om de servo in te schakelen voordat de herstelmodus wordt geactiveerd. |
| 2 | Herstel afsluiten | Met deze knop kunt u de herstelmodule afsluiten. |
| 3 | Header | In dit gedeelte kunt u de modus Software Recovery of de modus pakket/uitpakken selecteren. |
| 4 | 3D-simulatie | In dit gebied kunt u een 3D-simulatie van de ingestelde waarden bekijken. |
| 5 | Waarschuwingsbericht | Dit verklaart de voorzorgsmaatregelen. |
| 6 | Coördinaten weergeven | Hier kunt u de coördinaat instellen op basis van basis of wereld. |
| 7 | Knop basis/gereedschap | Hier kunt u de waarde instellen op basis van basis of gereedschap. |
| 8 | Gezamenlijk/taak | In dit gedeelte kunt u de gewenste waarden invoeren om de robot te laten bewegen. |
Voer de volgende stappen uit om de herstelmodus voor software te gebruiken:
Tik op het menu herstel in het koptekstvenster. Het scherm Software Recovery verschijnt automatisch in het venster Recovery.
Tik op elke gezamenlijke knop aan de rechterkant van het scherm Software Recovery en gebruik
 de
de  knoppen van de om de positie in te stellen. Of druk op de knoppen van de cockpit om de hoek van de verbinding aan te passen door direct te leren.
knoppen van de om de positie in te stellen. Of druk op de knoppen van de cockpit om de hoek van de verbinding aan te passen door direct te leren.Wijzigingen in de instelling worden in real-time weergegeven in het simulatievenster aan de linkerkant.
Wanneer de instelling is voltooid, tikt u op de X-knop linksboven om het venster te sluiten.
Voorzichtig
De software-reparatiemodus is niet beschikbaar wanneer de grenswaarde van de verbindingshoek met 3 graden wordt overschreden.
Inpakken/uitpakken gebruiken
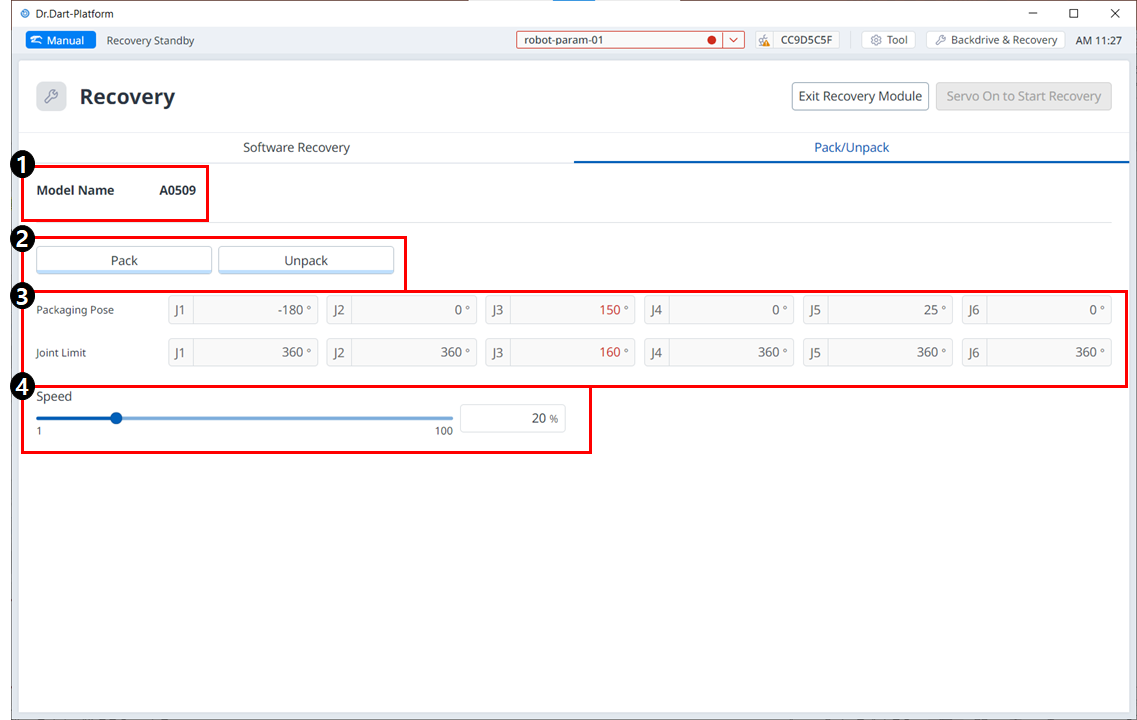
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Modelnaam | De naam van het aangesloten robotmodel wordt weergegeven. |
| 2 | Inpakken/uitpakken | U kunt inpakken of uitpakken selecteren. |
| 3 | Verpakkingsopstelling/gezamenlijke limiet | De pose- en gezamenlijke grenswaarden worden weergegeven. |
| 4 | Snelheidsverhouding | De snelheid van de uitpak- of uitpakmodus kan worden aangepast via een schuifregelaar of invoer. |
Voer de volgende stappen uit om de verpakkingsmodus te configureren:
Tik op het menu herstel in het koptekstvenster.

Selecteer het tabblad Verpakkingsmodus.

Tik op de knop Servo aan om herstel te starten om de verpakkingsmodus in te schakelen.

De robot gaat automatisch naar de ingestelde verpakkingshouding.
Met de knop pakken kunt u de robot in de positie inpakken zetten en met de knop uitpakken kunt u de robot in de standaard beginpositie zetten.