
Paneel verplaatsen
Menu
Items | Beschrijving | |
|---|---|---|
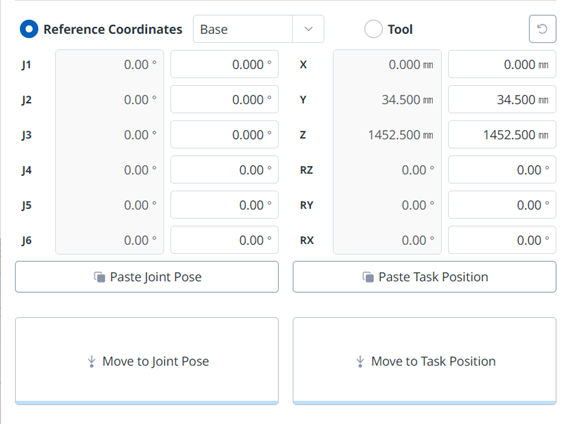
16 | Selecteer het referentiecoördinatensysteem | Selecteer in figuur 18 het referentiecoördinatensysteem dat voor de taakcoördinaten moet worden gebruikt. U kunt kiezen uit Base, World of User Coordinates. |
17 | Gewrichtshouding | Geeft de huidige robothouding en de doelgewrichtshouding weer. |
18 | Taakhouding | Geeft de huidige robothouding en de doeltaakhouding weer die passen bij het geselecteerde referentiecoördinatensysteem. |
19 | Plak de gewrichtshouding | Plak de waarde voor de houding die naar het klembord is gekopieerd in het paneel voor de gezamenlijke houding. |
20 | Taakhouding plakken | Plak de waarde voor de houding die naar het klembord is gekopieerd in het deelvenster voor de taakhouding. |
21 | Knop voor gezamenlijke beweging | Deze knop zorgt ervoor dat de robot naar de positie van het doelgewricht beweegt. |
22 | Knop taak verplaatsen | Deze knop zorgt ervoor dat de robot naar de gewenste taakhouding gaat. |
Hoek instellen om te bewegen
Volg deze stappen om de robot onder een bepaalde hoek te verplaatsen:
Selecteer het tabblad verplaatsen.
Voer de doelhoek van de robotverbinding in. (J4 is uitgeschakeld voor modellen uit de P-serie)
Schakel de Real-modus in.
Tik op de knop verplaatsen naar de bijbehorende gezamenlijke positie en houd deze ingedrukt om de hoek van de robotverbinding aan te passen.
Basisreferentiecoördinaten instellen op verplaatsing
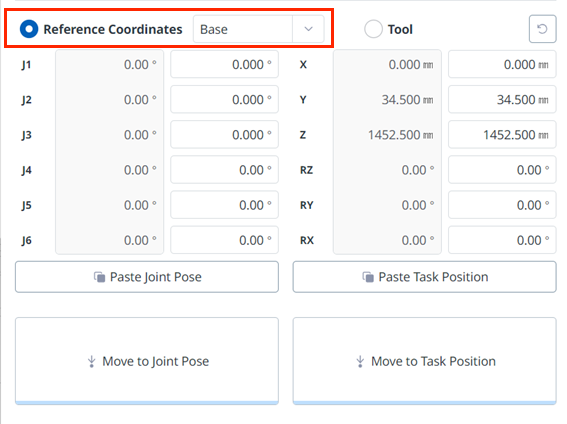
Volg deze stappen om de robot te verplaatsen op basis van de basiscoördinaten:
Selecteer het tabblad verplaatsen en Referentiecoördinaten .
Selecteer de weergavecode als basis.
Tik op de knop verplaatsen naar overeenkomstige taak opstellen en houd deze ingedrukt om naar de ingestelde coördinaten te gaan.
World Coordinates Reference Coordinates instellen op verplaatsing
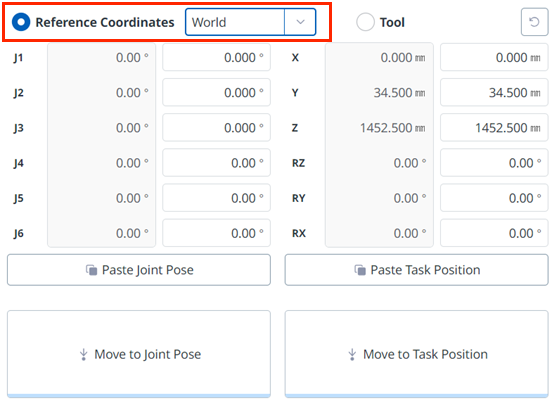
Volg deze stappen om de robot te verplaatsen op basis van World Coordinates:
Selecteer het tabblad verplaatsen en Referentiecoördinaten .
Selecteer wereld als weergavecoördinaten en selecteer het tabblad wereld.
Configureer de pose om te verplaatsen met verwijzing naar de wereldcoördinaten.
Tik op de knop verplaatsen naar overeenkomstige taak opstellen en houd deze ingedrukt om naar de ingestelde coördinaten te gaan.
Coördinaten instellen om te verplaatsen op basis van het hulpmiddel
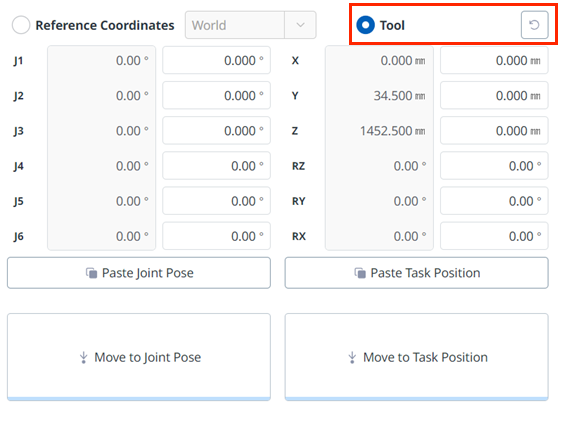
Ga als volgt te werk om de robot te verplaatsen op basis van de gereedschapscoördinaten:
Selecteer het tabblad verplaatsen en selecteer het tabblad gereedschap.
Configureer de pose die u wilt verplaatsen met verwijzing naar het hulpmiddel.
Tik op de knop verplaatsen naar overeenkomstige taak opstellen en houd deze ingedrukt om naar de ingestelde coördinaten te gaan.