
Thuispositie
Beginpositie
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Standaardpositie-optie | Dit is het gedeelte waarin u de optie Standaardpositie kunt selecteren. |
| 2 | Standaardwaarde voor positie | Dit zijn de waarden die overeenkomen met de standaardpositie, die allemaal 0 zijn. |
| 3 | Optie aangepaste positie | Hiermee kunt u de optie aangepaste positie selecteren. |
| 4 | Aangepaste positiewaarde | U kunt de momenteel ingestelde waarde voor de aangepaste positie en de huidige robotpositie controleren. |
| 5 | Beginpositie | Met deze knop kunt u de standaardpositie of de aangepaste positie instellen die u als beginpositie hebt ingesteld. |
| 6 | Waarschuwingsbericht | Let op bij het instellen van dit systeem. |
| 7 | Opslaan | Met deze knop kunnen de instellingswaarden worden opgeslagen. |
Waarschuwing
Wanneer een robot of verbinding van een robot wordt verwisseld, moet de aangepaste beginpositie worden gereset.
Cockpit
Direct leren wordt gebruikt om het robotuiteinde met de handen vast te houden om de robot naar de gewenste positie te duwen en te trekken en de pose toe te passen op de geselecteerde beweging. Er zijn twee directe onderwijsmethoden.
Freedrive: Elk gewricht beweegt in de richting waarin de gebruiker kracht heeft uitgeoefend
Beperkte beweging: Het robotuiteinde beweegt of draait alleen in de richting die is ingesteld in de beperkte beweging, zelfs wanneer er kracht wordt uitgeoefend vanuit een willekeurige richting
Freedrive
Wanneer knop 1 wordt ingedrukt, wordt de Freedrive-modus geactiveerd, zodat de robot vrij kan bewegen. Elk gewricht beweegt in de richting waarin de gebruiker kracht heeft uitgeoefend. De robot kan niet met de hand worden bewogen zodra de knop wordt losgelaten.
Tijdens direct onderricht knippert de robot-LED cyaan.
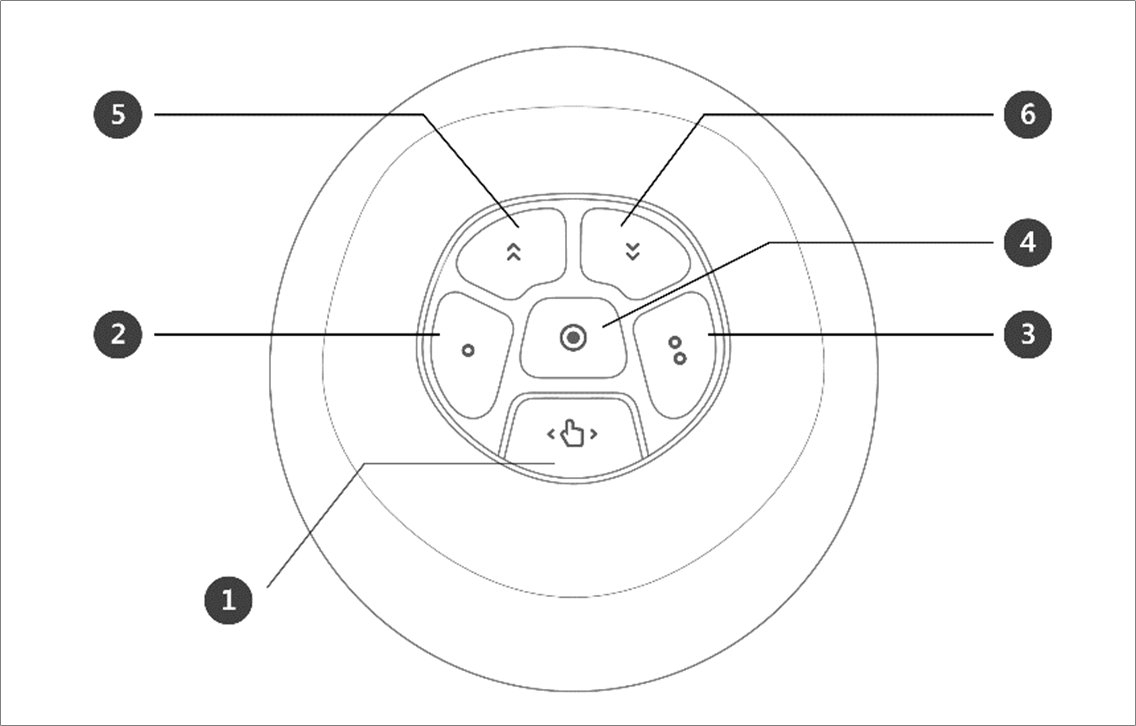
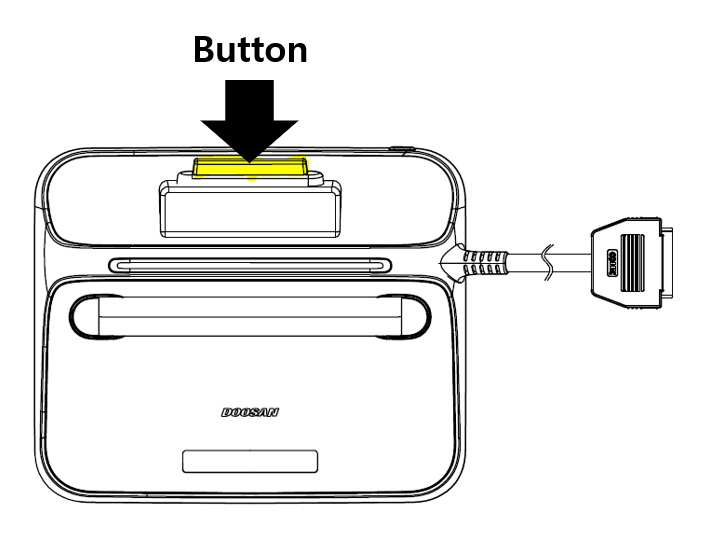
Als u op de handgeleidingsknop aan de achterkant van de leerhanger drukt, wordt de Freedrive-modus geactiveerd, net als wanneer u op knop 1 drukt, en kan de robot vrij bewegen.
Beperkte beweging
Wanneer knop 2 en knop 3 worden ingedrukt, beweegt het roboteinde alleen in de richting die overeenkomt met de beperkende voorwaarde, zelfs wanneer er vanuit een willekeurige richting kracht wordt uitgeoefend. De constraint condition kan worden ingesteld met 2 van 4 van de condities in de volgende afbeelding: Z-as beperkt, vlak fix beperkt, oppervlak beperkt en richting beperkt.
Menu
Items | Beschrijving | |
|---|---|---|
| 1 | Cockpit-afbeelding | Dit is een afbeelding voor Cockpit-instellingen. |
| 2 | Reset | Met deze knop kunt u de ingestelde waarden initialiseren. |
| 3 | Instelling van 1 knop | Dit is het gedeelte waarin u de functie kunt selecteren die u wilt instellen voor knop 1. |
| 4 | Instelling met 2 knoppen | Dit is het gedeelte waarin u de functie kunt selecteren die u wilt instellen voor knop 2. |
| 5 | 1+2 knoppen instellen | Dit is het gedeelte waarin u kunt kiezen of u de klemming wilt inschakelen voor de knoppen 1+2. |
| 6 | Geleideafbeelding | Een leidend beeld voor Cockpit Setting items. |
Status van de Cockpit-knop verkrijgen
De gebruiker kan informatie verkrijgen over het indrukken of loslaten van de Cockpit-knop.
De robot biedt de functie om de Cockpit-knop te bedienen, zodat deze in verschillende toepassingen kan worden gebruikt.
De „bewakingsgegevens” in de communicatie-API geeft informatie over de Cockpit-knop.
Als u op de Cockpit-knop van de robot drukt of andersom, kunt u deze detecteren via de DRL API.
DRL API: Get_cockpit_input (raadpleeg de programmeerhandleiding.)
Parameters: (int) index
Retourneert: (int) 1: Ingedrukt (de knop wordt ingedrukt), 0: Losgelaten ( de knop wordt niet ingedrukt)