
DC-CONTROLLER (CS-12P)
Productintroductie (CS-12P)
Naam van elk onderdeel en functie
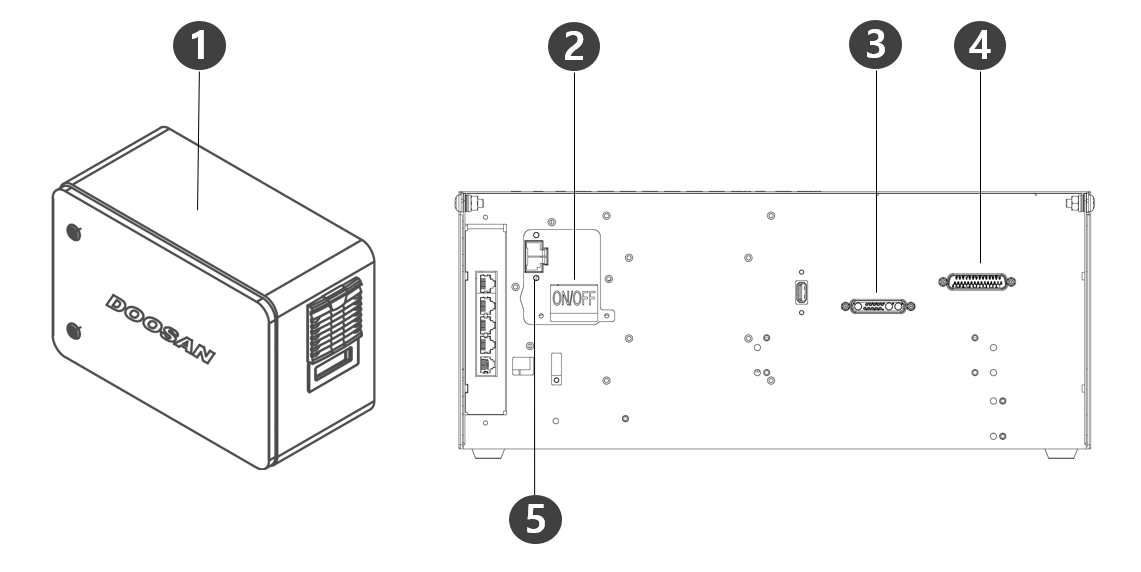
No. | Items | Beschrijving |
1 | I/O-aansluitklem (intern) | Het kan worden aangesloten op controllers of randapparatuur van andere robots. |
2 | Aan/uit-schakelaar | Wordt gebruikt om de hoofdvoeding van de controller in of UIT TE SCHAKELEN. |
3 | Leer de aansluitklem van de hangende kabel | Gebruikt voor het aansluiten van de hangende kabel van de leerfunctie op de controller. |
4 | aansluitklem robotkabel | Gebruikt om de robotkabel aan te sluiten op de controller. |
5 | Aansluitklem voor de stroomaansluiting | Wordt gebruikt om de voeding van de controller aan te sluiten. |
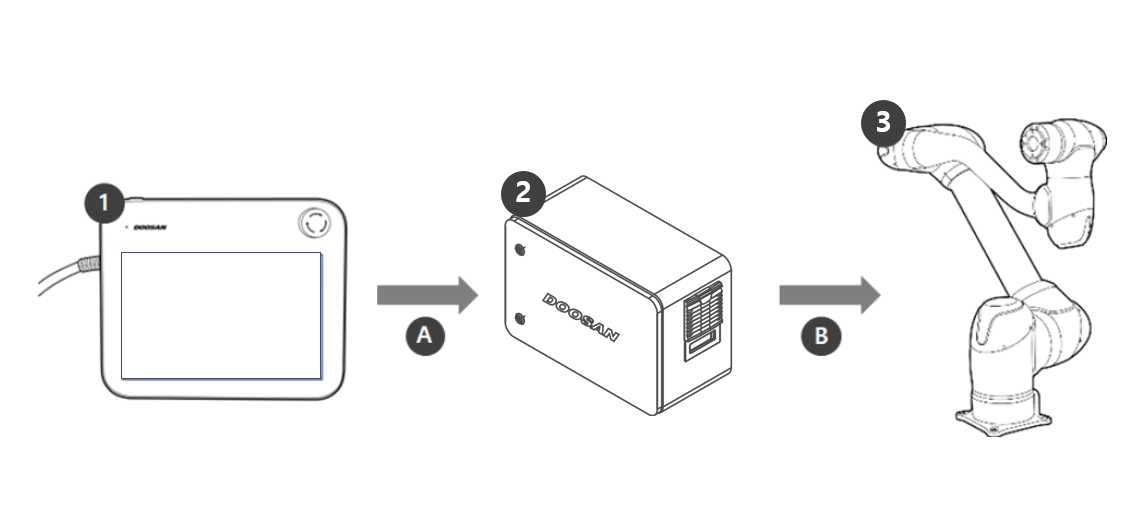
Systeemconfiguratie
No. | Naam | Beschrijving |
|---|---|---|
1 | Leer hanger | Dit apparaat beheert het gehele systeem en is in staat om de robot specifieke poses te leren of instellingen met betrekking tot de manipulators en controllers te maken. |
2 | Controller | Deze regelt de beweging van de robot op basis van de houding of beweging die is ingesteld door de leerhanger. Het beschikt over verschillende I/O-poorten voor aansluiting en gebruik van verschillende apparatuur en apparaten. |
3 | Manipulator | Het is een industriële collaboratieve robot die transport- of assemblagetaken kan uitvoeren met verschillende gereedschappen. |
A | Commando/bewaking | |
B | Voeding/netwerk |
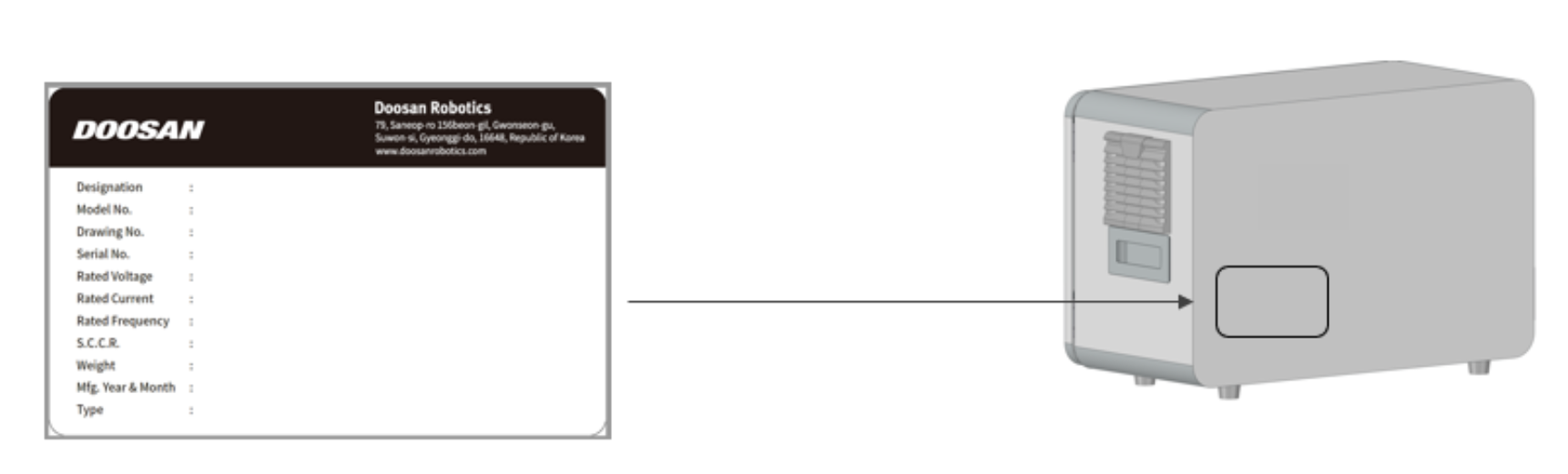
Typeplaatje en label
Installatie (CS-12P)
Aandachtspunten tijdens de installatie
Voorzichtig
Zorg voor voldoende ruimte voordat u de controller installeert. Als er niet voldoende ruimte is beveiligd, kan de controller beschadigd raken of kan er een tekort zijn aan de bedieningskabel of de handbedieningskabel.
Controleer de ingangsvoeding wanneer u de voeding op het product aansluit. Als de aangesloten ingangsvoeding afwijkt van het nominale ingangsvermogen (22-60VDC), werken veel producten niet goed of kan de controller beschadigd raken.
Installatieomgeving
Houd bij het installeren van de controller rekening met het volgende.
Zorg voor voldoende ruimte voordat u de controller installeert.
De controller moet vast zitten.
Zorg ervoor dat geen enkel onderdeel in het mobiele voertuig is bevestigd.
Hardware-installatie
Installeer de robot, de controller en het leerhangsysteem, de belangrijkste onderdelen van het systeem, en voorzie ze van stroom voordat u de manipulator bedient. De instructies voor het installeren van elk element zijn als volgt:
Verbinding van de Manipulator met de controller
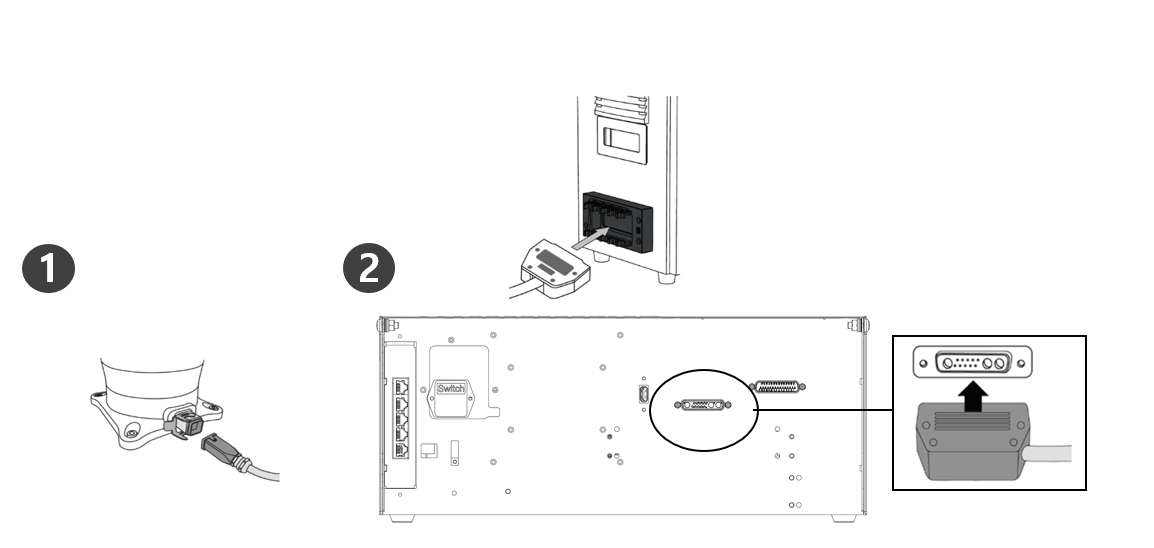
Beschrijving | |
|---|---|
1 | Sluit de kabel van de manipulator aan op de controller en plaats een bevestigingsring
|
2 | Sluit het andere uiteinde van de aansluitkabel van de manipulator aan op de controller
|
Voorzichtig
Koppel de kabel van de manipulator niet los terwijl de robot is ingeschakeld. Hierdoor kan de robot defect raken.
Probeer de manipulatorkabel niet aan te passen of uit te breiden.
Zorg bij het installeren van de controller op de vloer voor een vrije ruimte van ten minste 50 mm aan beide zijden om voldoende ventilatie te garanderen.
Zorg ervoor dat u de connectoren goed vergrendelt voordat u de controller inschakelt.
Opmerking
Bij het configureren van het systeem wordt aanbevolen een geluidsreductor te installeren om geluidseffecten en storingen in het systeem te voorkomen.
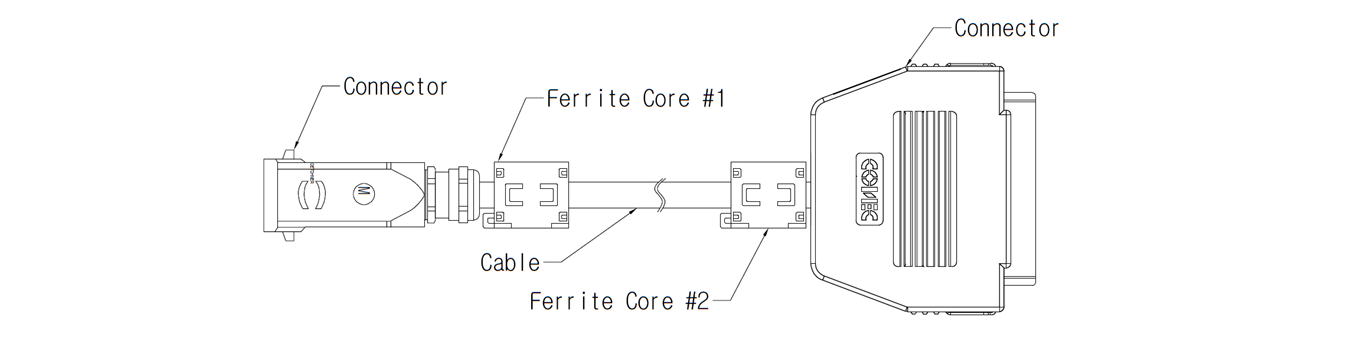
Als de regelaar wordt beïnvloed door geluid dat wordt gegenereerd door elektromagnetische golven, moet een ferrietkern worden geïnstalleerd om een normale werking te garanderen. De installatielocatie is als volgt:
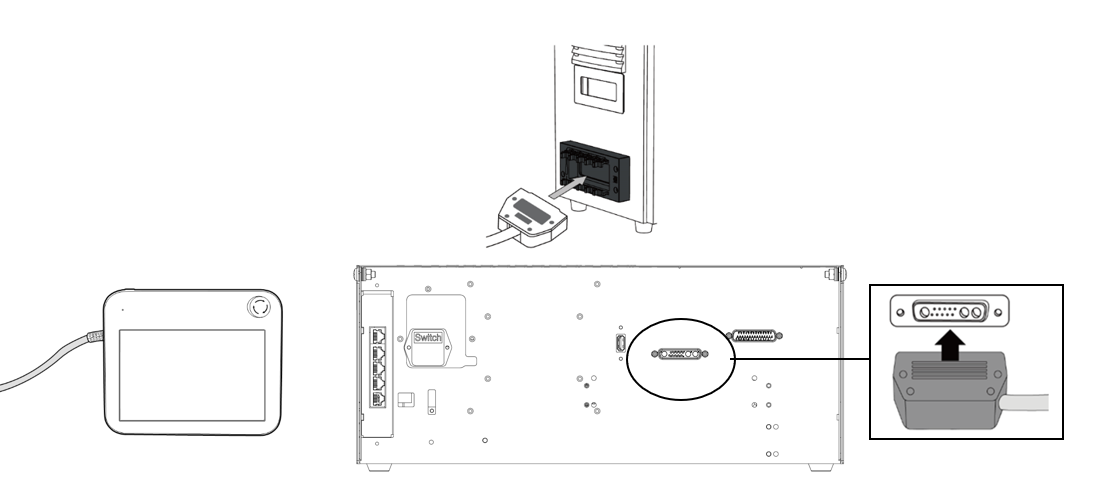
Sluit de controller aan op het onderstel
Sluit de hangende kabel voor leren aan op de overeenkomstige aansluitingen op de controller totdat deze vastklikt en zorg ervoor dat de kabel goed is aangesloten.
Voorzichtig
Controleer bij het aansluiten van de kabel de vorm van de verbinding voordat u deze aansluit, zodat de pen niet verbuigt.
Als de hanglamp wordt gebruikt door aan het mobiele voertuig of aan de controller te hangen, zorg er dan voor dat u niet op de aansluitkabels struikelt.
Zorg ervoor dat de controller, het hangende deel en de kabel niet in contact komen met water.
Installeer de controller en leer de hanglamp niet in een stoffige of natte omgeving.
Controllers en slimme hanglamp mogen nooit worden blootgesteld aan een stofrijke omgeving boven IP20. Wees vooral voorzichtig in omgevingen met geleidend stof.
Opmerking
Bij het configureren van het systeem wordt aanbevolen een geluidsreductor te installeren om geluidseffecten en storingen in het systeem te voorkomen.
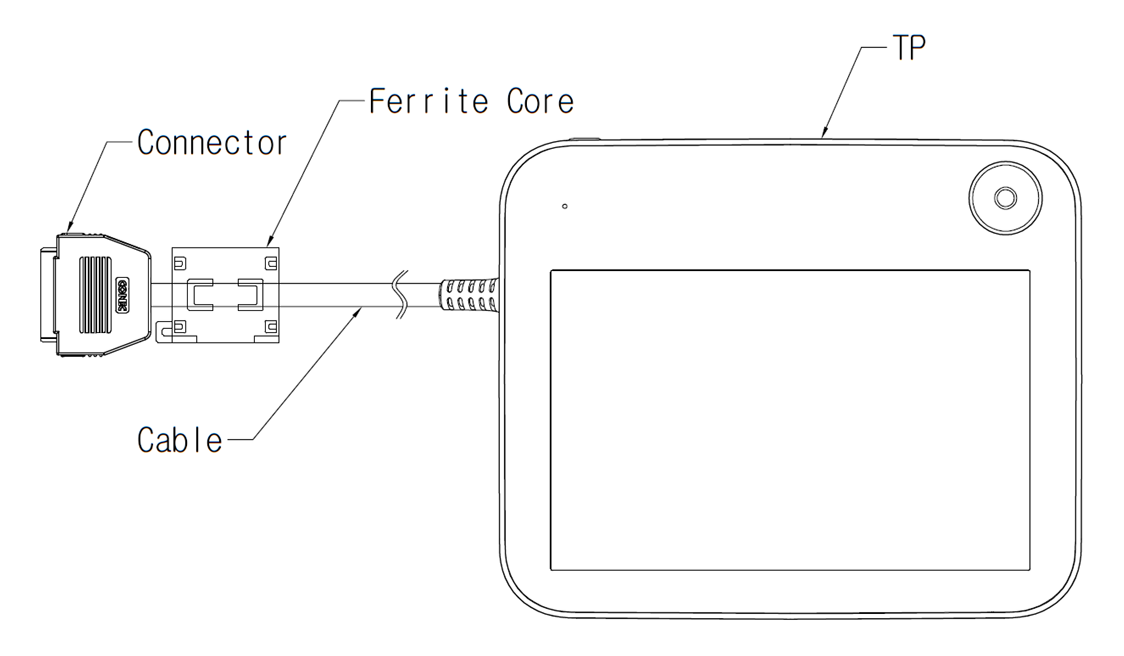
Als de leerhanglamp wordt beïnvloed door geluid dat wordt gegenereerd door elektromagnetische golven, is het noodzakelijk een ferrietkern te installeren voor een normale werking. De installatielocatie is als volgt:
De Manipulatorkabel en de kabel voor het inleren van het hangende gedeelte plaatsen
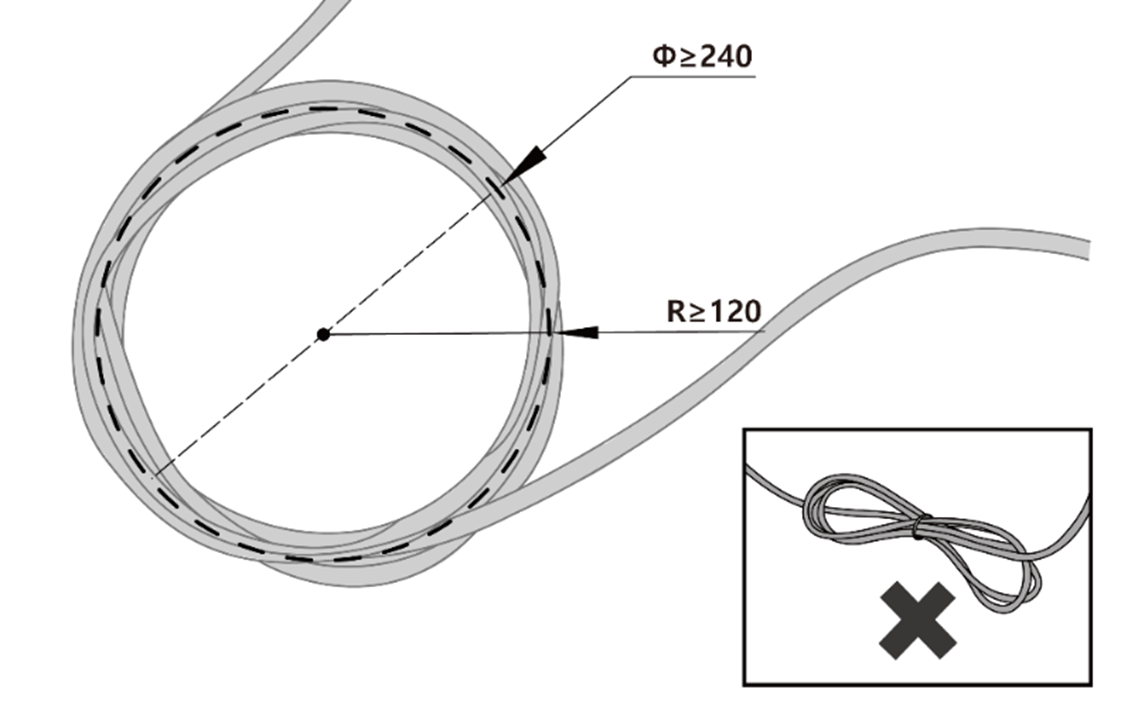
Zorg ervoor dat de kromtestraal van de manipulator en de handbedieningskabel groter is dan de minimale kromtestraal (120 mm).
Voorzichtig
Zorg ervoor dat de kromtestraal tussen de kabel van het leersysteem en de connector van het hangsysteem groter is dan de minimale kromtestraal (120 mm).
Als de kromtestraal kleiner is dan de minimale kromtestraal (120 mm), kan de kabel worden losgekoppeld of kan het product beschadigd raken.
In omgevingen waar elektromagnetische ruis kan optreden, moet de juiste kabelinstallatie worden uitgevoerd om storingen te voorkomen.
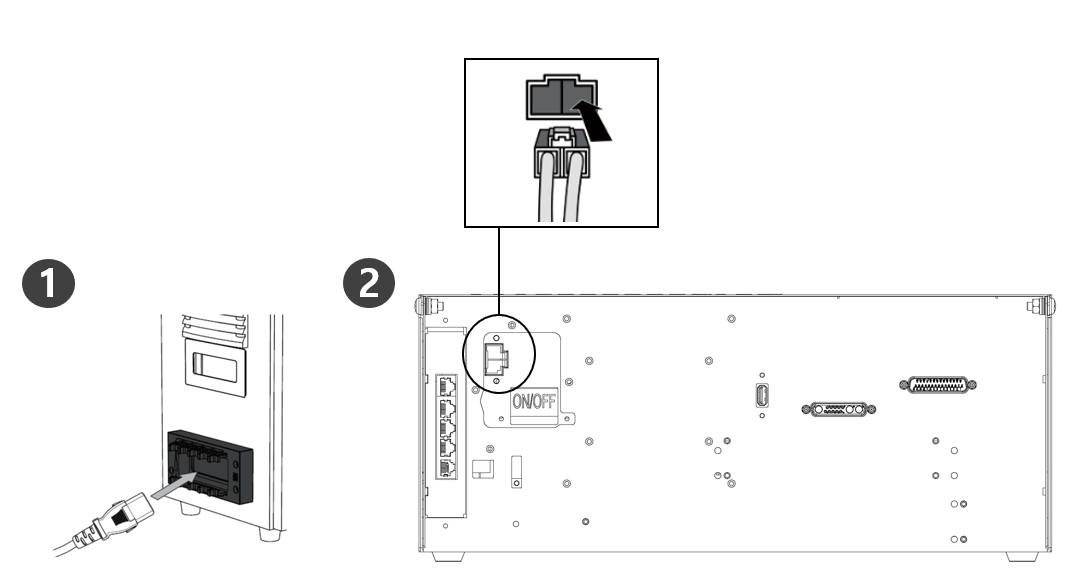
De voeding aansluiten op de controller
Sluit de voedingskabel aan op de overeenkomstige aansluitingen op de controller totdat deze vastklikt en controleer of de kabel goed is aangesloten.
Waarschuwing
Zorg ervoor dat de robot goed geaard is nadat u de voedingskabels hebt aangesloten (elektrische aardingsaansluitingen). Breng een gemeenschappelijke massa tot stand voor alle apparatuur in het systeem met ongebruikte bouten die verband houden met het massasymbool in de controller. De aardgeleider moet voldoen aan de maximale stroomsterkte van het systeem.
Bescherm het ingangsvermogen van de regelaar met behulp van apparaten zoals een stroomonderbreker.
Wijzig of verleng de robotkabel niet. Dit kan brand of defecte controllers veroorzaken.
Zorg ervoor dat alle kabels goed zijn aangesloten voordat u de controller van stroom voorziet. Gebruik altijd de originele kabel die bij het product is geleverd.
Let erop dat u de polariteit van de ingangsspanning niet verkeerd aansluit.
Opmerking
Bij het configureren van het systeem wordt aanbevolen een aan/uit-schakelaar te installeren waarmee alle apparaten tegelijk kunnen worden uitgeschakeld.
Bij gebruik van een controller voor DC kan de beweging van de robot beperkt zijn, afhankelijk van de belasting en beweging.
Als de ingangsspanning lager is dan 48 V, kan de beweging van de robot worden beperkt afhankelijk van de belasting en beweging.
De voeding moet voldoen aan de minimumvereisten, zoals massa- en stroomonderbrekers. De elektrische specificaties zijn als volgt:
Parameter | Specificaties |
Ingangsspanning | 22 – 60 V DC |
Nominale ingangsstroom | 30 A |