
Probeer voorbeelden van complianceopdrachten
Voorzichtig
Lees en volg de voorzorgsmaatregelen voordat u het monster probeert. Zie DEEL 1 voor meer informatie. Veiligheidshandleiding.
Opmerking
Als er een extern koppel boven de drempelwaarde is bij het in- of uitschakelen van de compliantiecontrole, stopt de robot het programma vanwege de JTS-fout (Joint Torque sensor).
De stijfheid kan worden gewijzigd ongeacht de grootte van het externe koppel.
Tijdens compliancecontrole kunnen gezamenlijke bewegingen, zoals de MoveJ-opdracht, niet worden uitgevoerd.
Drempelwaarde van JTS-fout (Nm) | ||||||
Model | J1 | J2 | J3 | J4 | J5 | J6 |
|---|---|---|---|---|---|---|
M1013 | 25 | 25 | 25 | 15 | 15 | 15 |
M0617 | 30 | 30 | 30 | 15 | 15 | 15 |
M0609 | 18 | 18 | 15 | 15 | 15 | 15 |
M1509 | 18 | 18 | 15 | 15 | 15 | 15 |
H2515 | 40 | 50 | 40 | 15 | 15 | 15 |
H2017 | 40 | 50 | 40 | 15 | 15 | 15 |
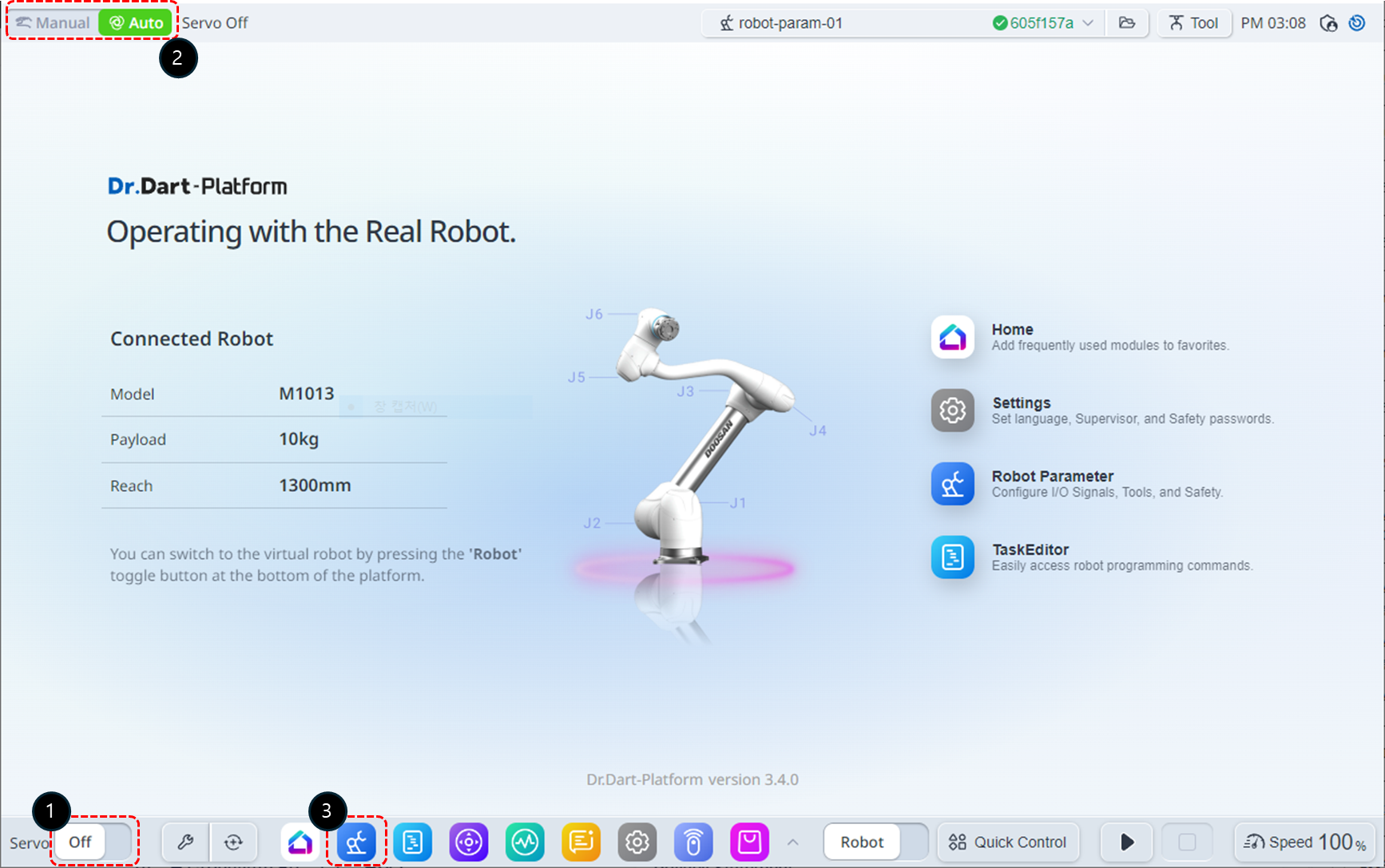
Wijzig de servostatus in aan.
Wijzig de bedrijfsmodus in handmatig.
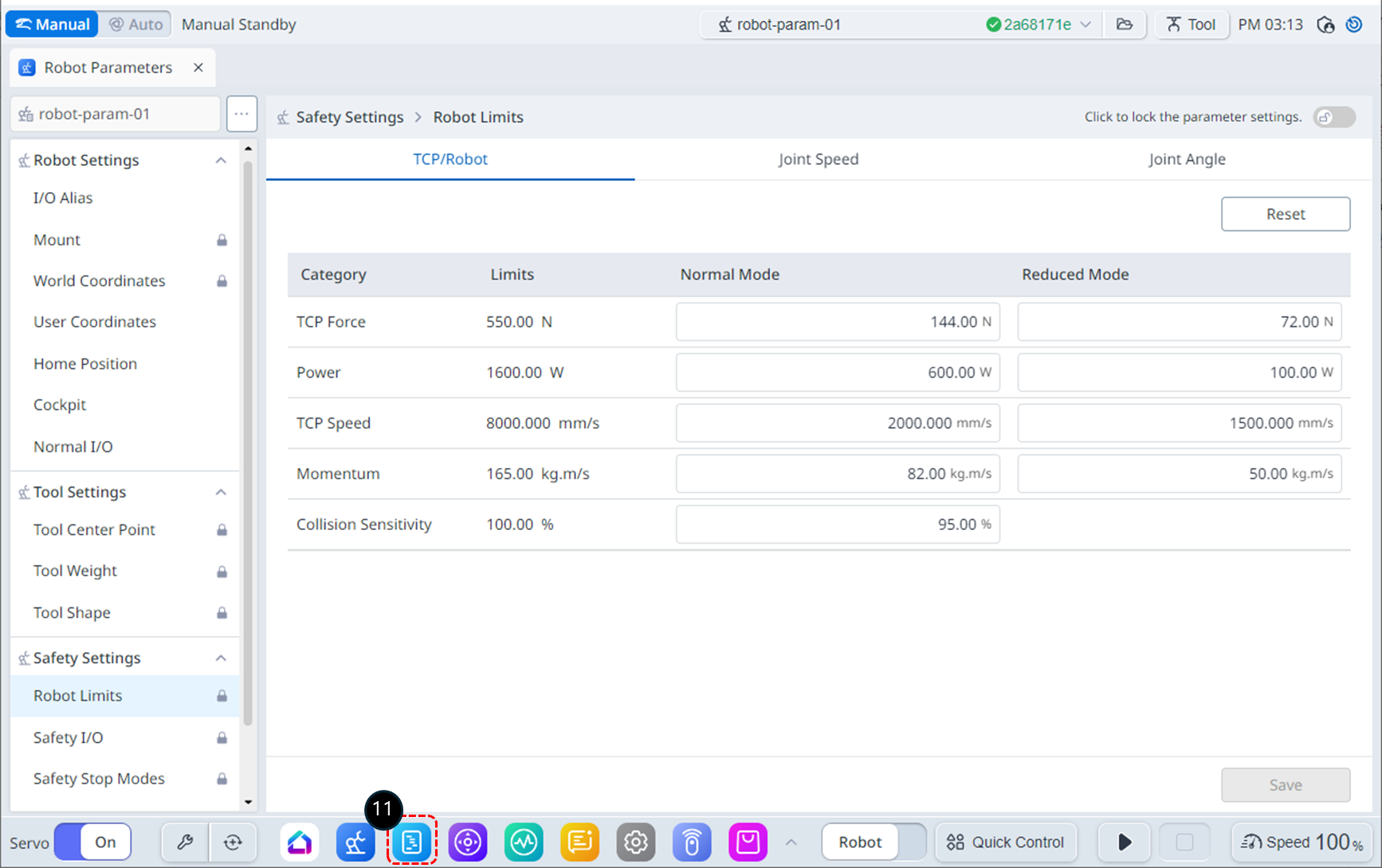
Selecteer de module Robotparameters in het onderste menu. In dit voorbeeld is de botsingsgevoeligheid ingesteld op 95% om de reden voor het verlagen van de botsingsgevoeligheid bij compliancecontrole uit te leggen.
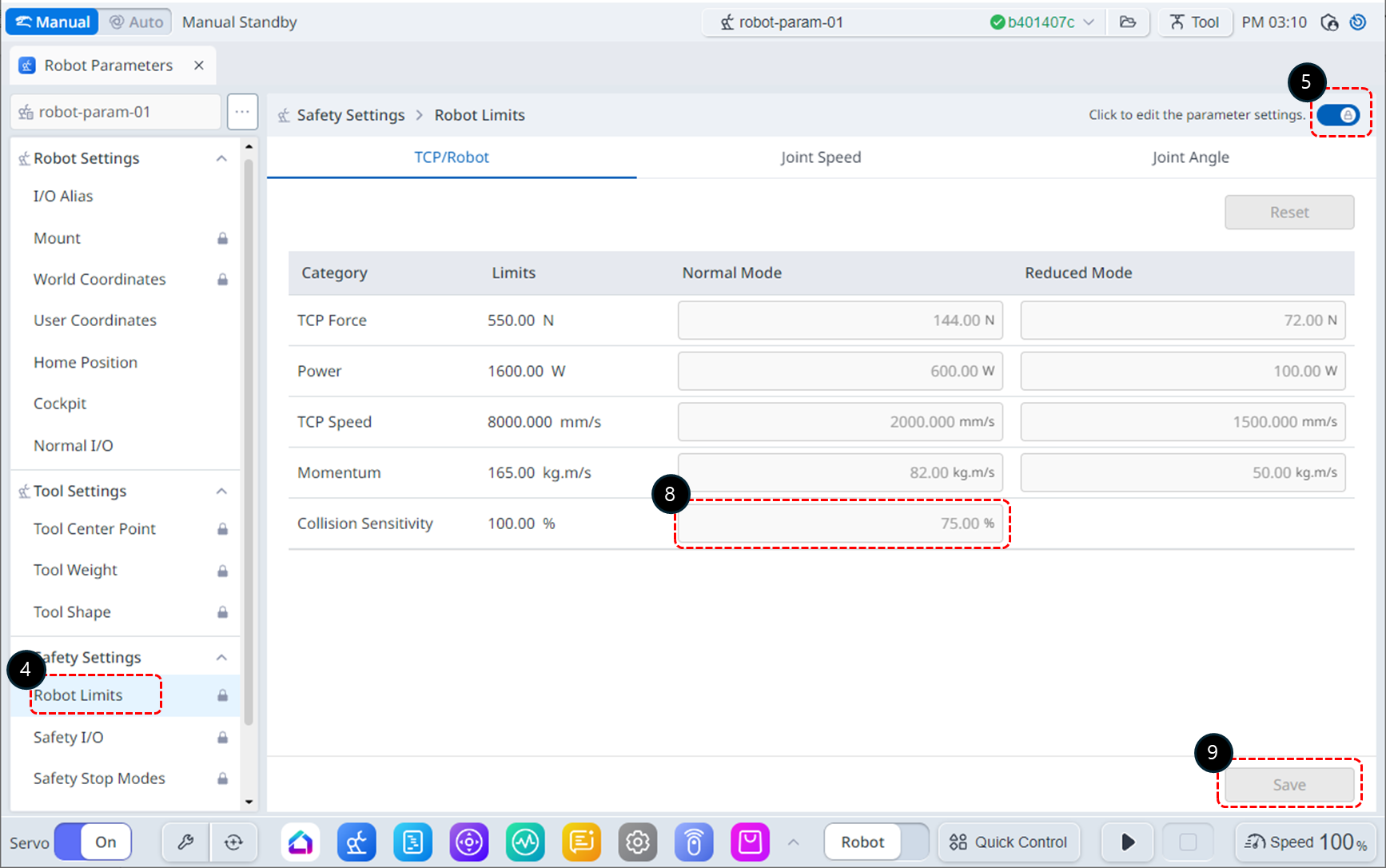
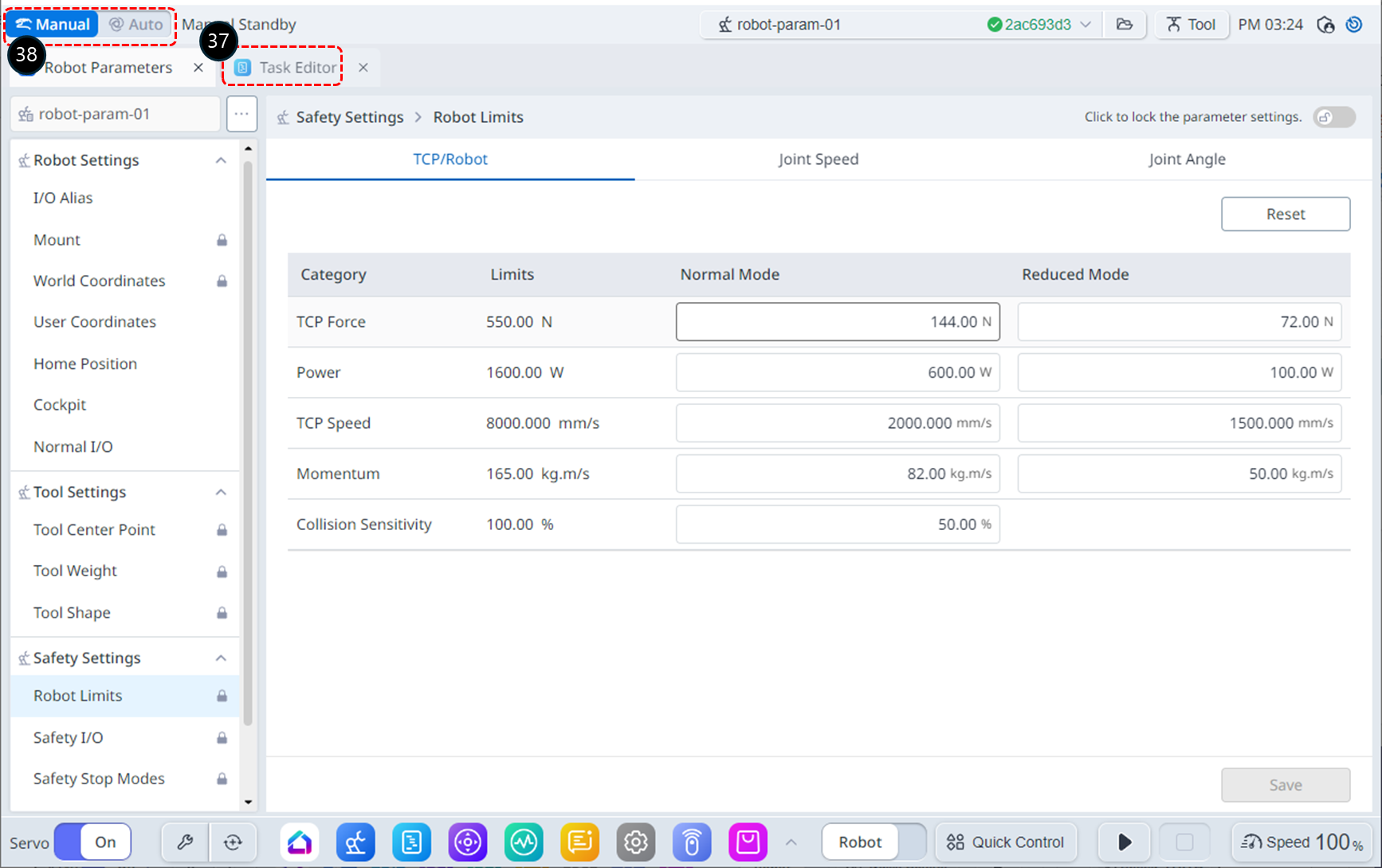
Selecteer Robotlimieten in Veiligheidsinstellingen.
De bewerkingsstatus van de parameters inschakelen.
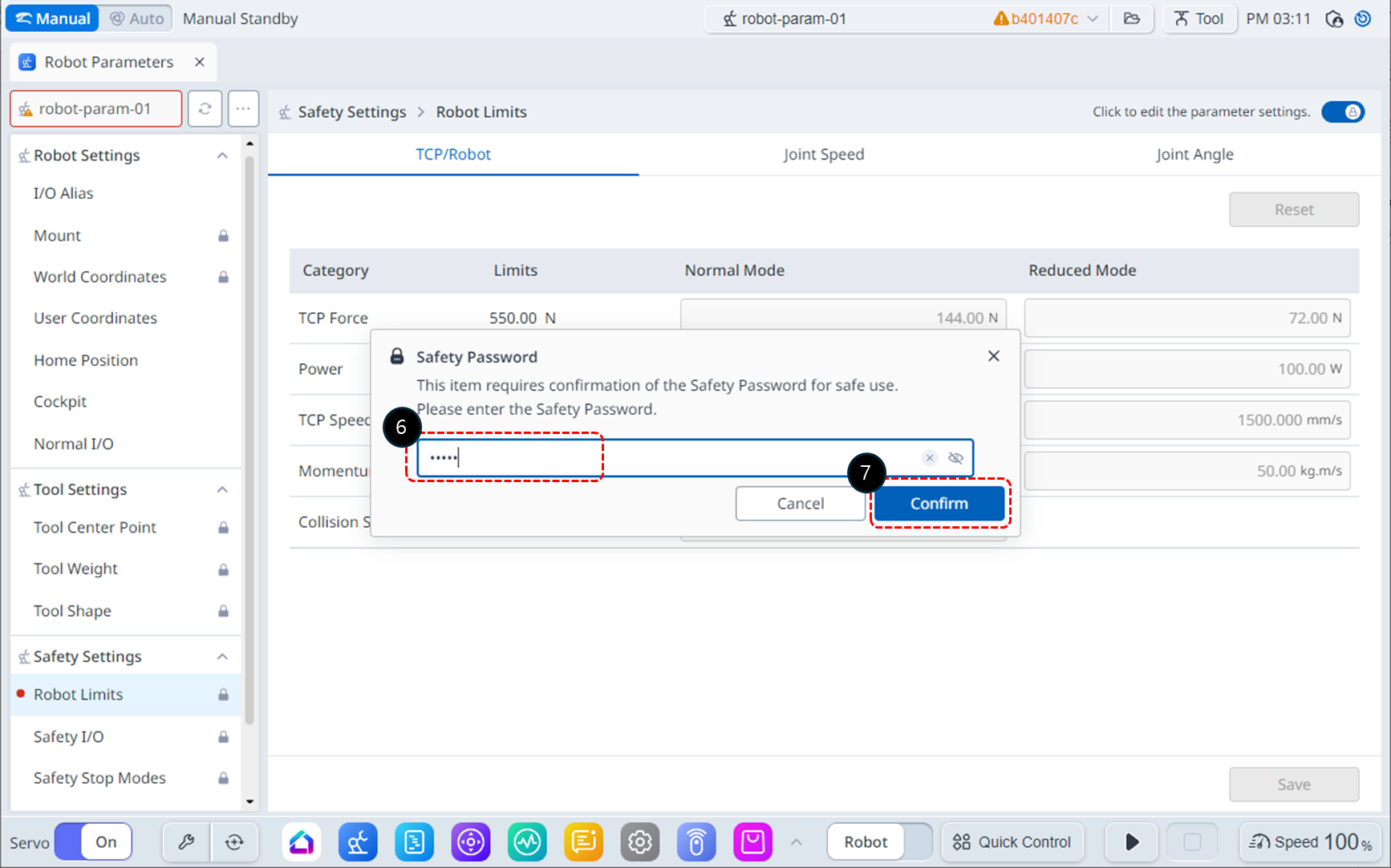
Als er een venster voor het invoeren van een wachtwoord wordt weergegeven, voert u het veiligheidswachtwoord in (standaard veiligheidswachtwoord: admin).
Klik op de knop bevestigen.
Wijzig de botsingsgevoeligheid in 95%.
Klik op de knop Opslaan om de instellingen op te slaan.
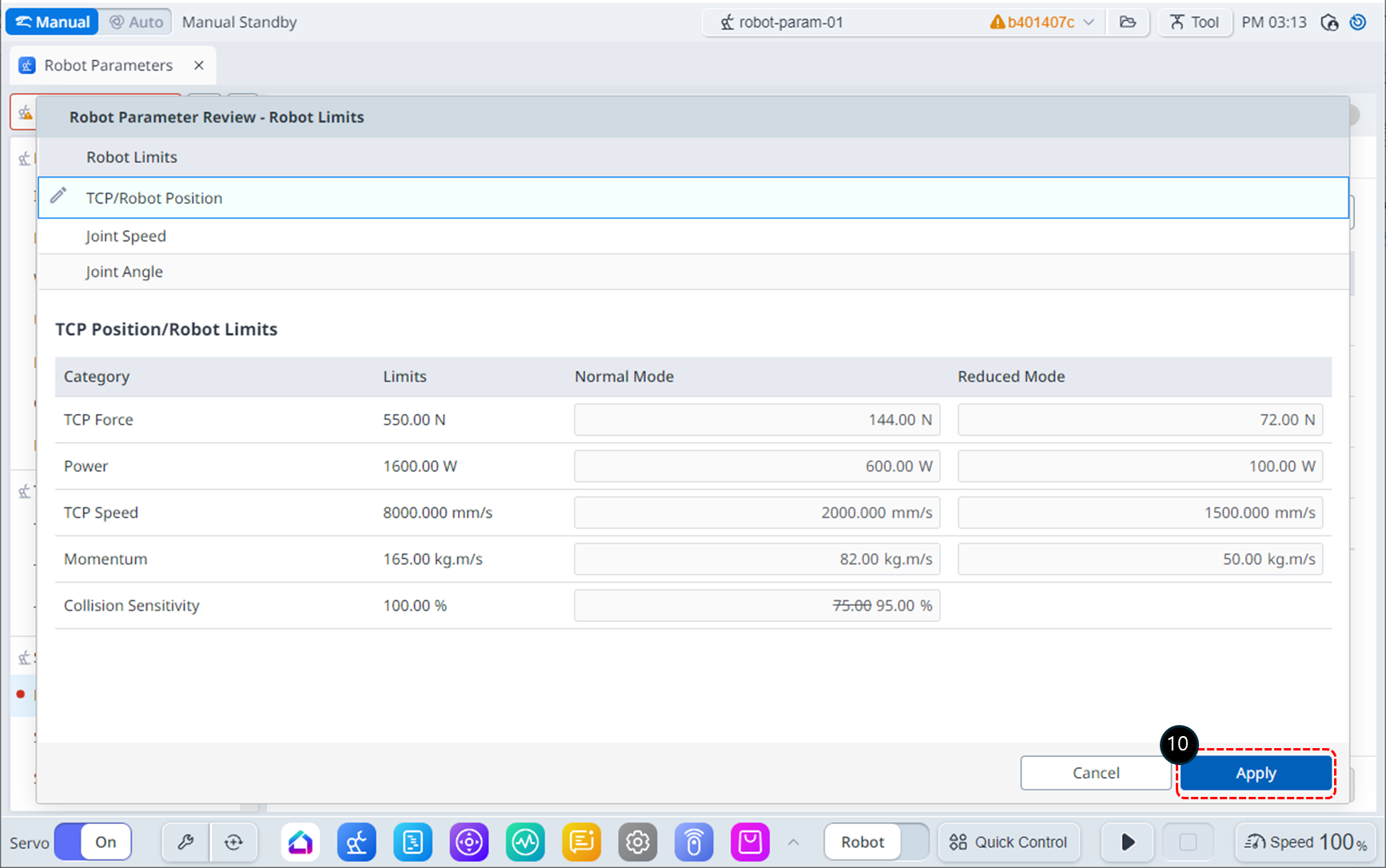
Nadat u de wijzigingen hebt bekeken, klikt u op de knop Toepassen.
Selecteer de module Taakeditor in het onderste menu.

Wijzig de naam van de taak in Task_demo_Compliance_ctrl.
Sla de bijgewerkte taaknaam op.
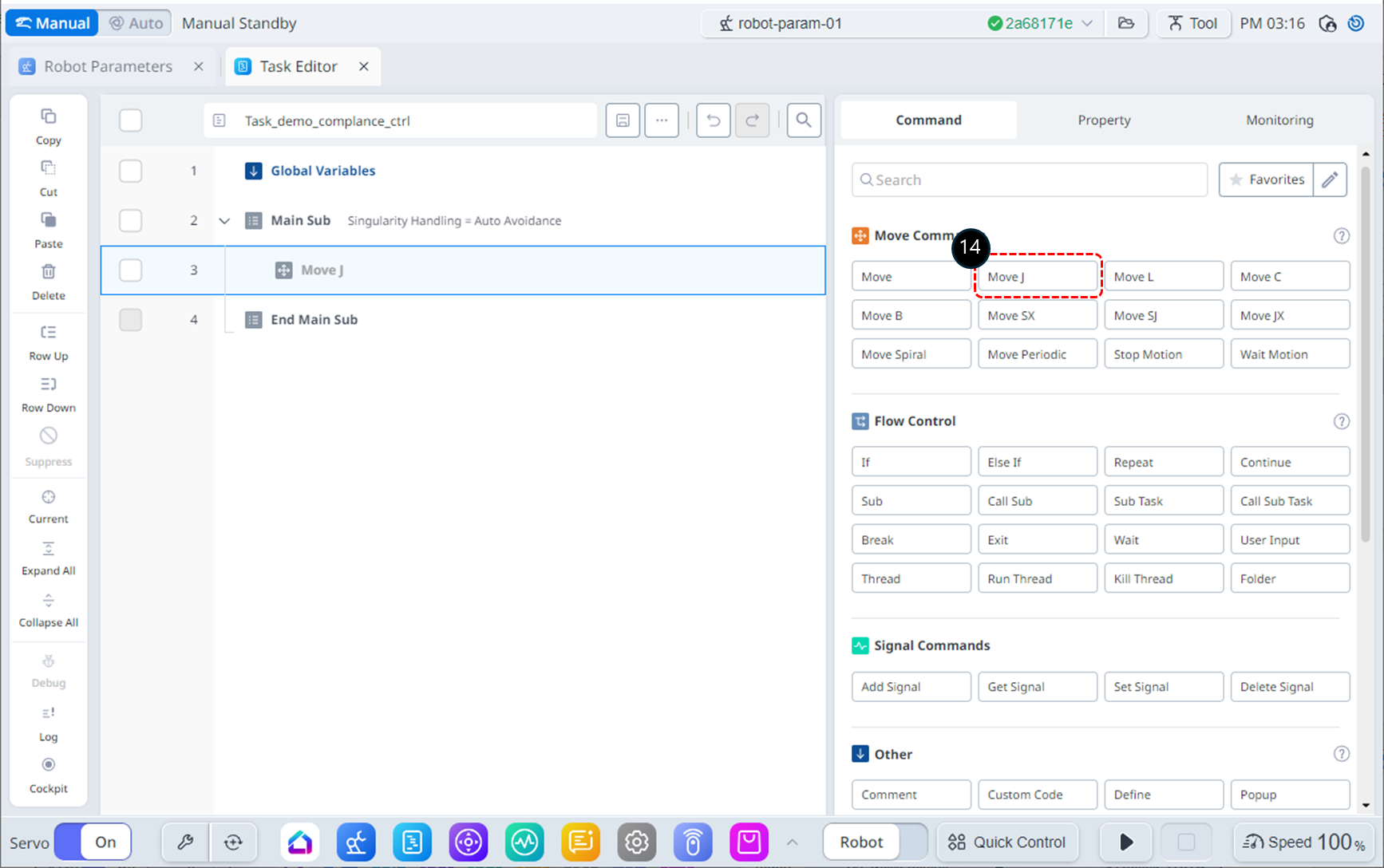
Voeg de opdracht MoveJ toe. Deze opdracht wordt gebruikt om de robot naar de startpositie te verplaatsen voor nalevingscontrole.
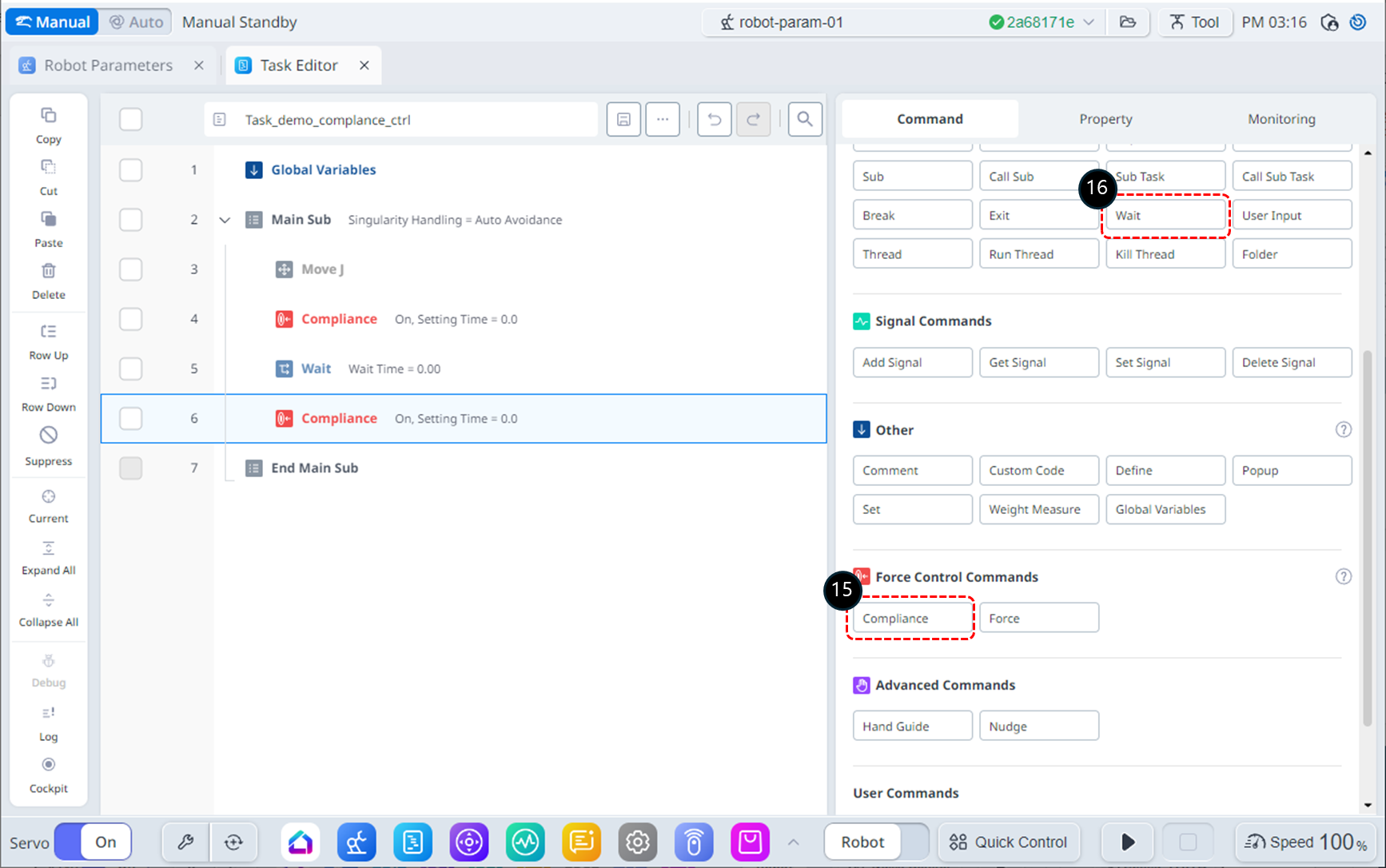
Voeg twee complianceopdrachten toe. Deze opdrachten worden gebruikt om de compliancecontrole te activeren en te deactiveren.
Voeg een opdracht wachten in tussen de complianceopdrachten. Deze opdracht wacht wordt gebruikt om de naleving te controleren.
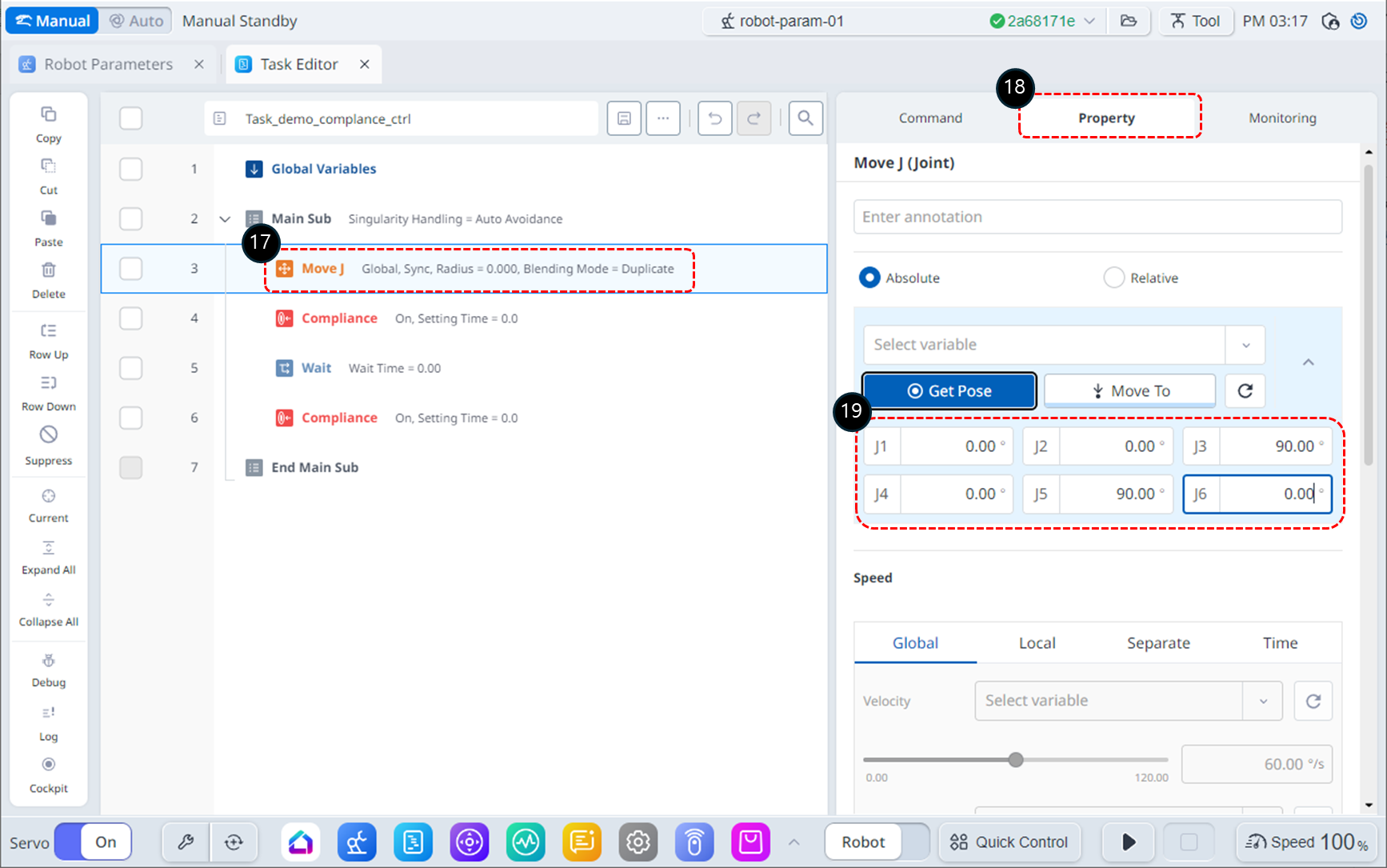
Selecteer de opdracht MoveJ op regel 3.
Kies het tabblad eigenschap.
Wijzig de doelpositie van MoveJ in (0, 0, 90, 0, 90, 0) graden Afhankelijk van de installatieruimte van de robot kan de hoek van de J1 indien nodig worden aangepast.
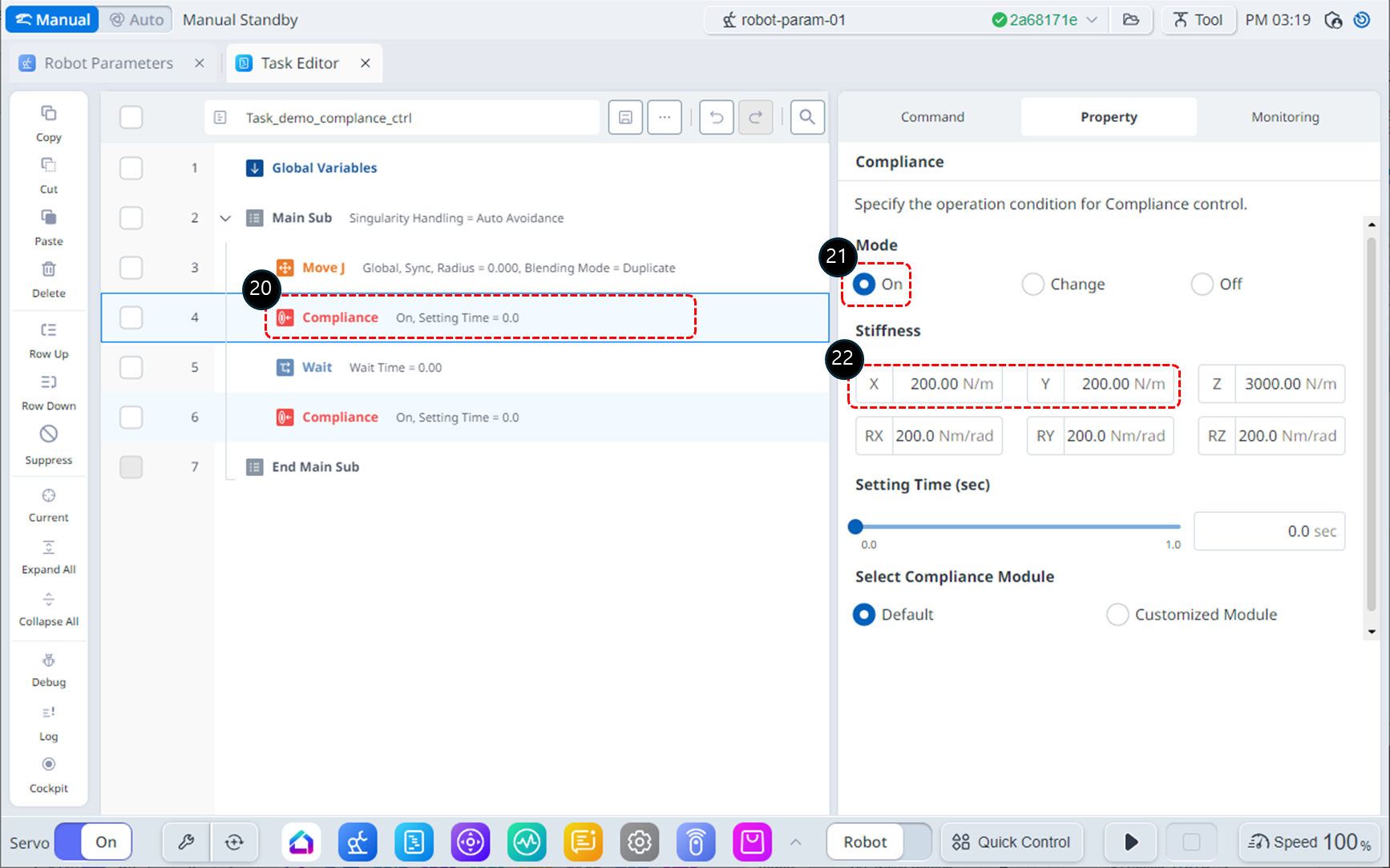
Selecteer de opdracht Compliance op regel 4.
Stel op het tabblad eigenschap de modus als volgt in: Modus aan activeert nalevingscontrole.
Modus : Aan
Stel de stijfheid als volgt in: Verlaag de stijfheid in de X- en Y-richting om de robot zachter in die richtingen te laten reageren.
X : 200 N/m
Y : 200 N/m
Z : 3000 N/m (standaard)
RX, Ry, RZ : 200 Nm/rad (standaard)
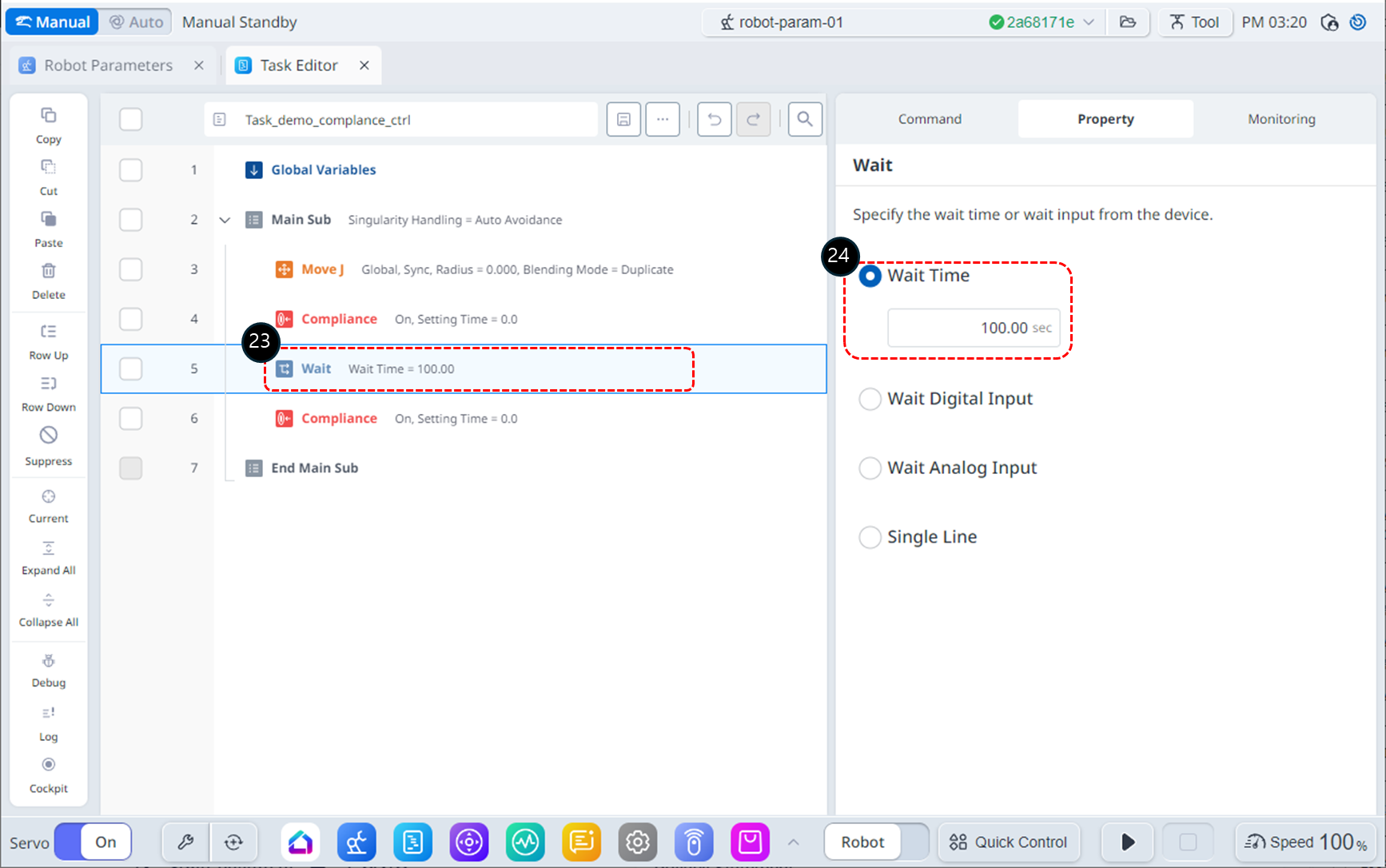
Selecteer de opdracht wachten op regel 5.
Stel de wachttijd als volgt in.
Wachttijd : 100 sec
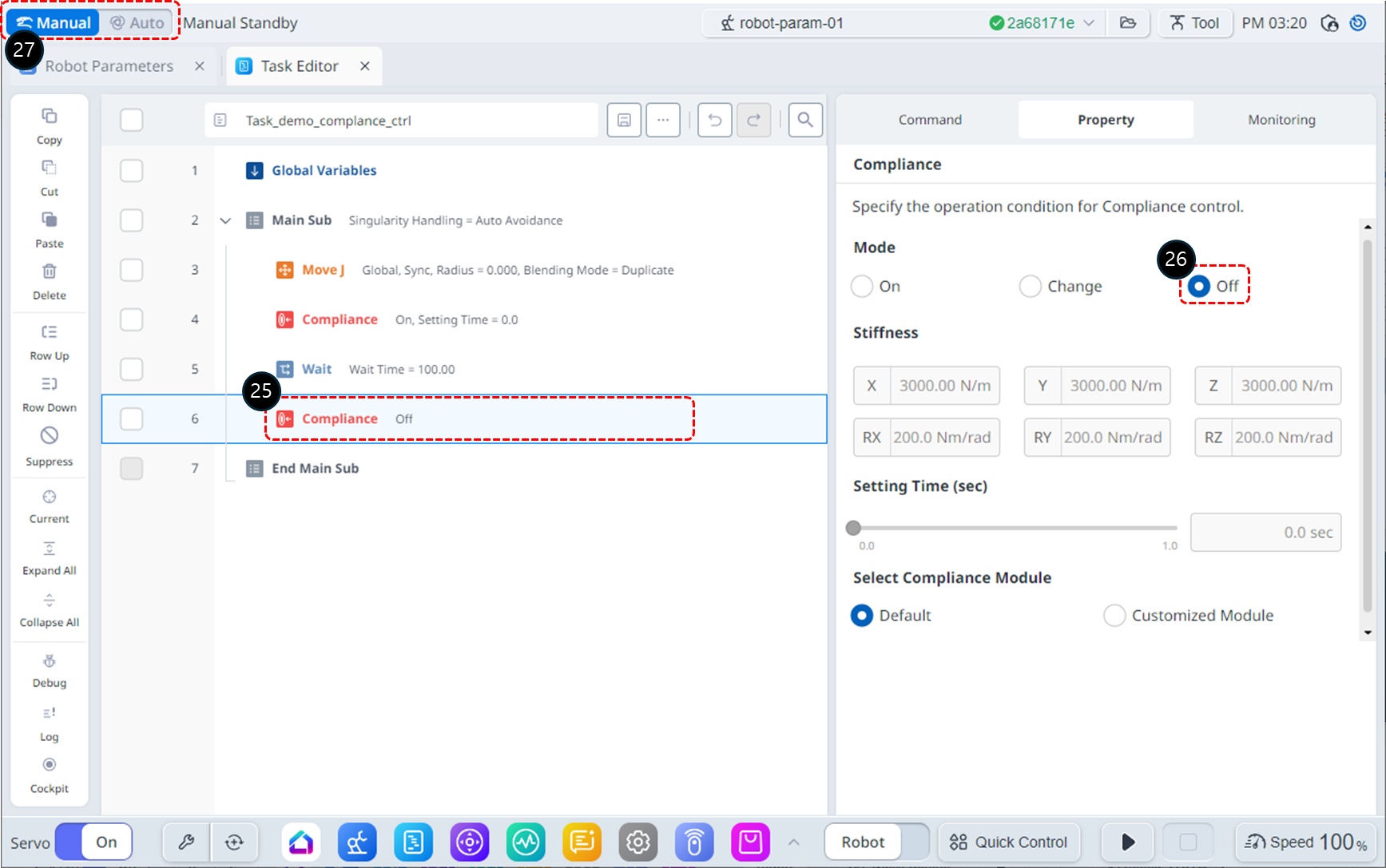
Selecteer de opdracht Compliance op regel 6.
Stel op het tabblad eigenschap de modus als volgt in: Modus uit Hiermee schakelt u de compliancecontrole uit.
Modus : Uit
Wijzig de bedrijfsmodus in Auto. Het tabblad eigenschap wordt automatisch overgeschakeld naar het tabblad Monitoring.
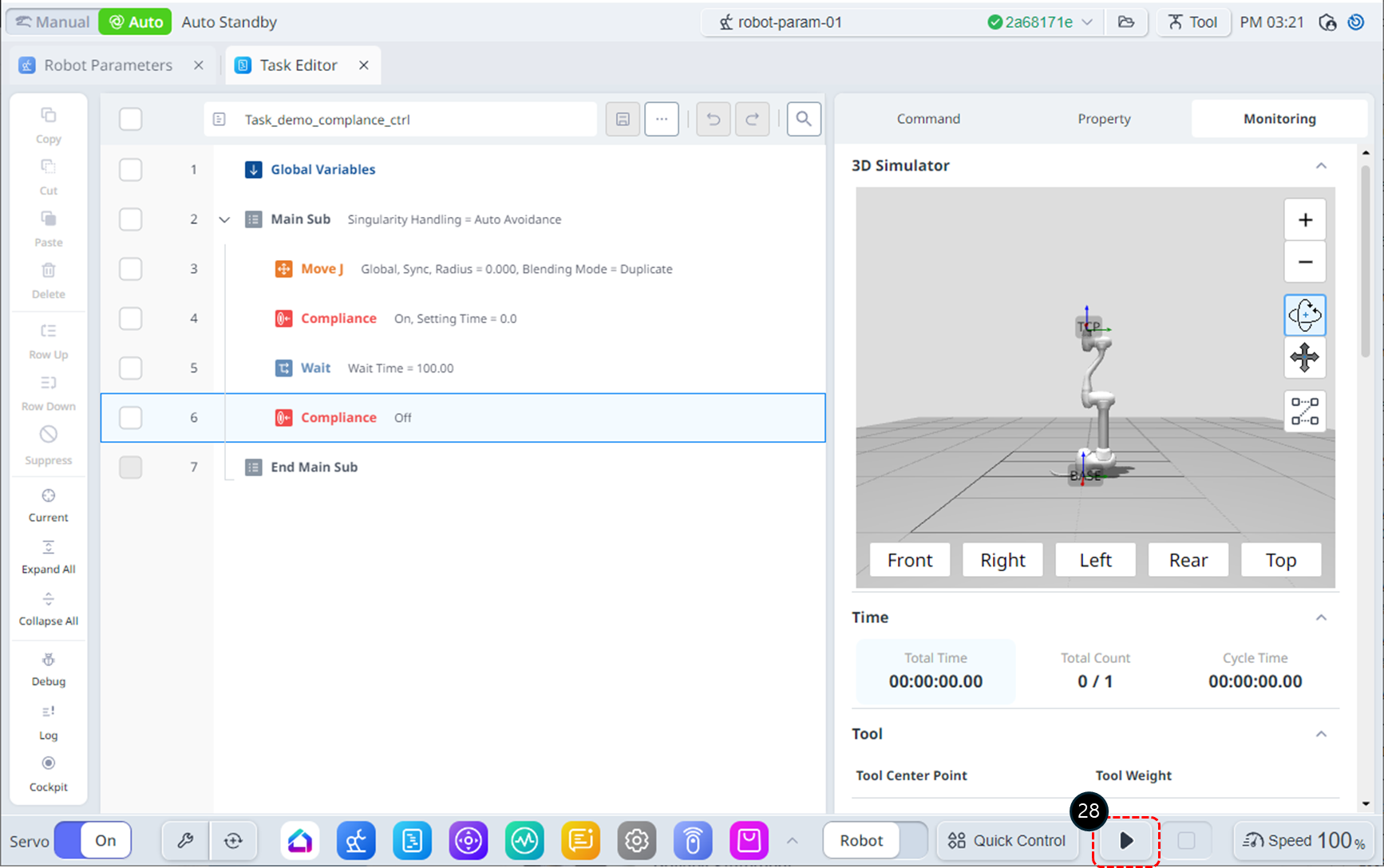
Klik op de knop uitvoeren. De robot beweegt naar de startpositie, start compliancecontrole en blijft 100 seconden stilstaan. Duw gedurende deze tijd het eindeffect van de robot voorzichtig naar het lichaam van de robot toe. De robot stopt met een botsingsfout (of TCP Force Limit-fout). In de door de botsing veroorzaakte veiligheidsstop geeft de LED van de robot een gele kleur aan.
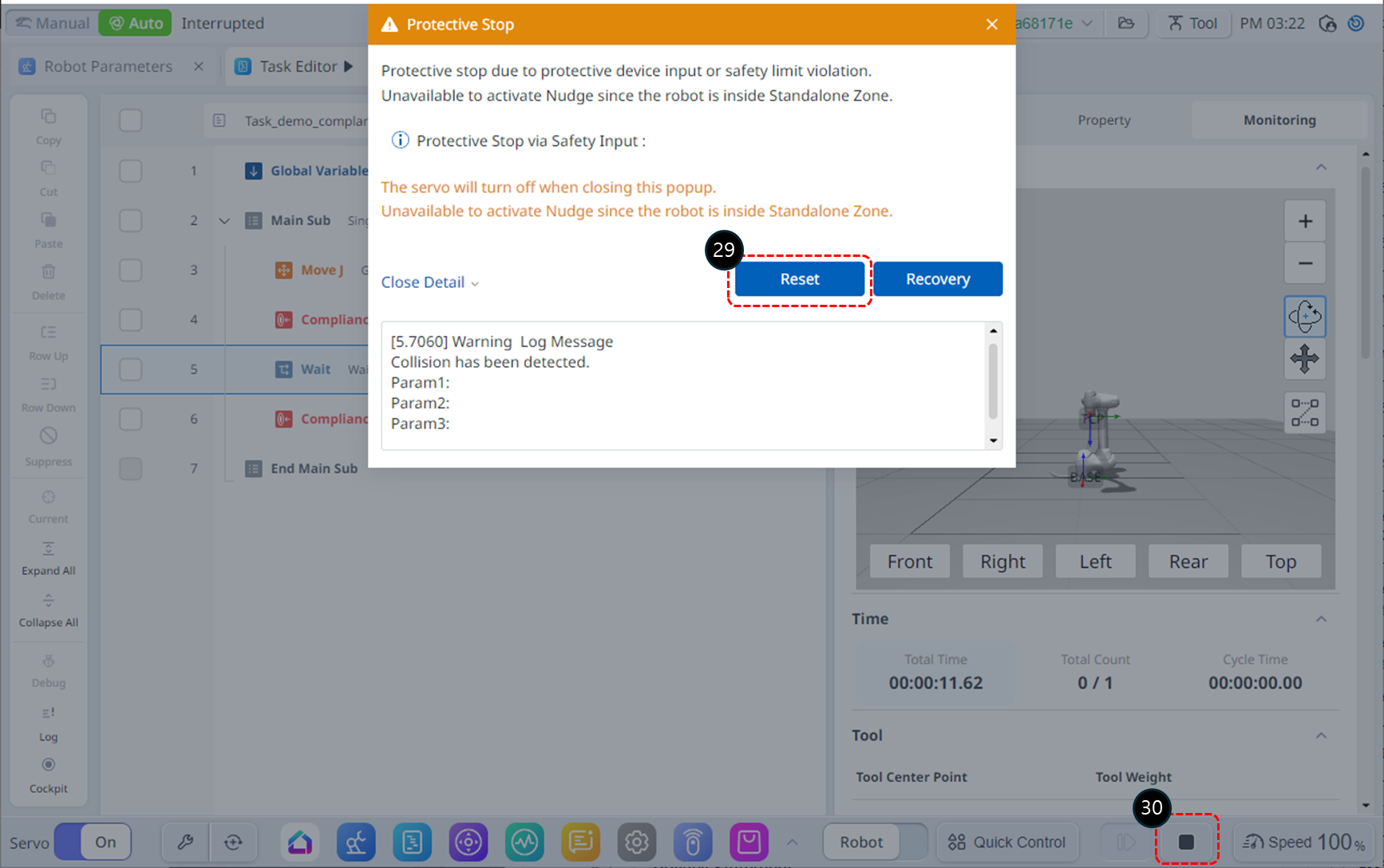
Klik op de knop Reset in het waarschuwingsvenster voor de veiligheidsstop. Het taakprogramma wordt hervat.
Klik op de knop stoppen om het programma te beëindigen.
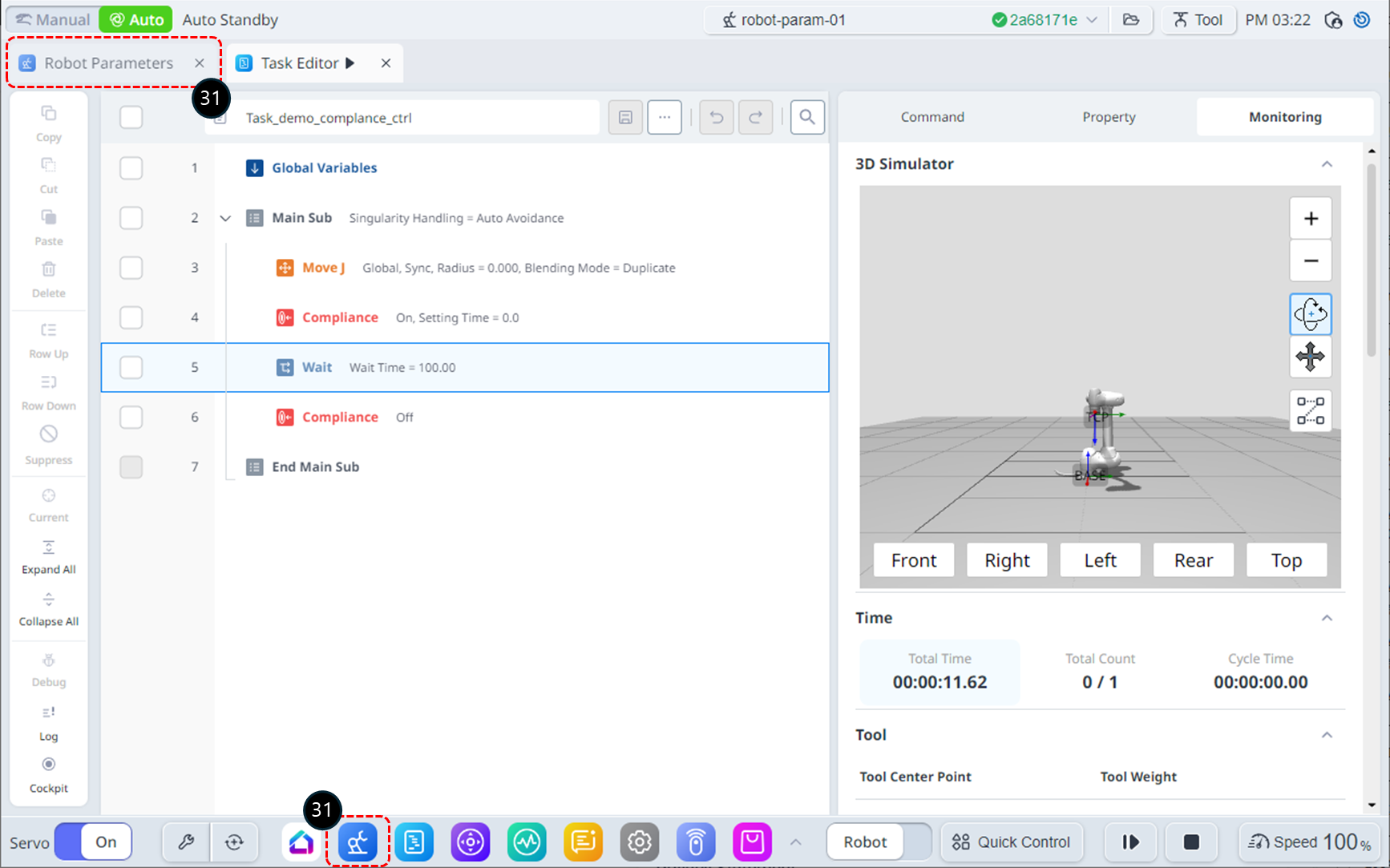
Om botsingsproblemen op te lossen, moet de botsingsgevoeligheid in de veiligheidsinstellingen worden verlaagd. (Als er een probleem is met de TCP Force Limit, moet de parameter TCP Force worden verhoogd.) Selecteer de module Robotparameters in het onderste menu. U kunt ook het tabblad Robotparameters in de linkerbovenhoek selecteren, wat hetzelfde werkt.
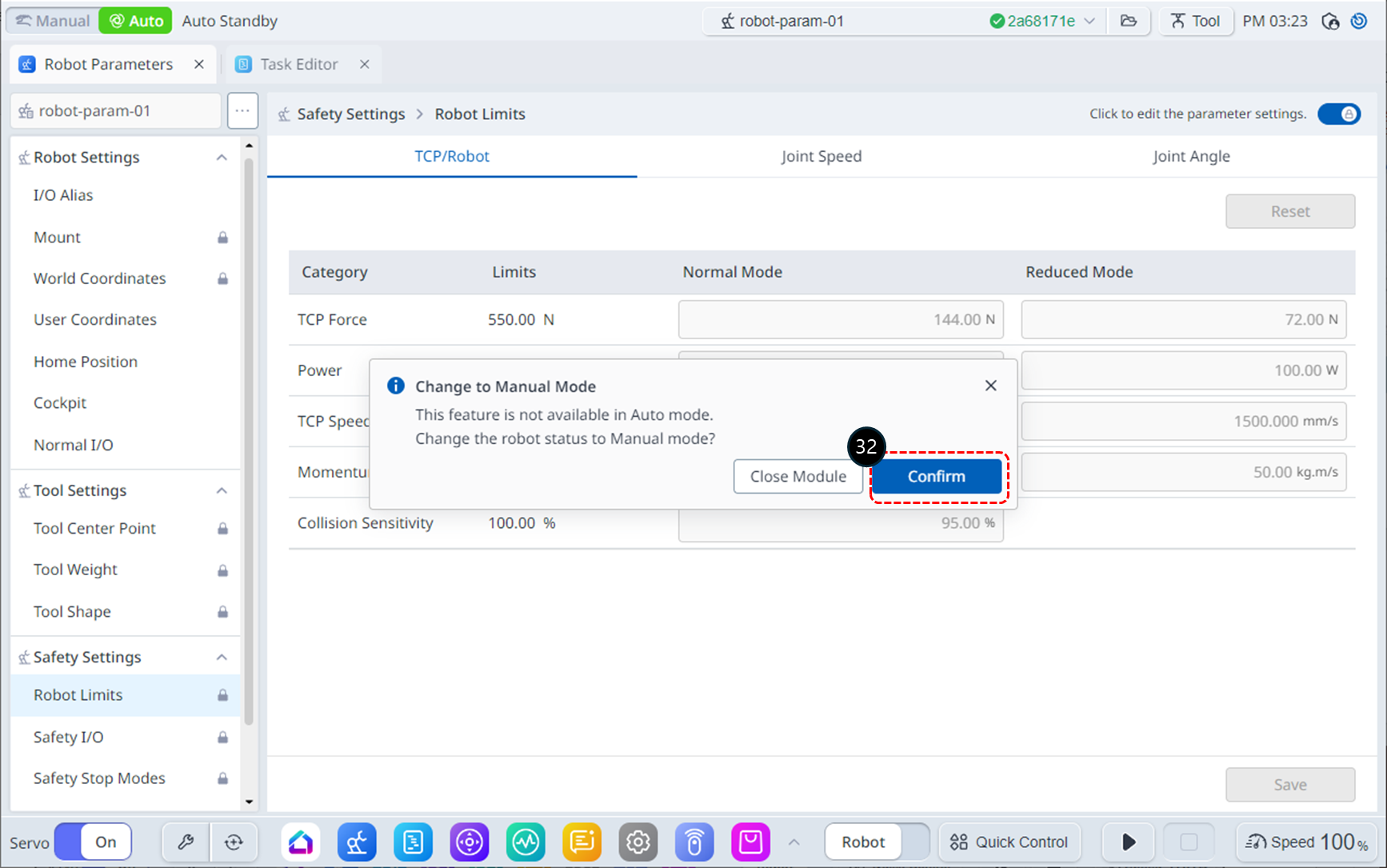
In de automatische modus wordt bij het openen van de module Robotparameters een meldingsvenster geactiveerd. Klik op de knop bevestigen om over te schakelen naar de handmatige modus.
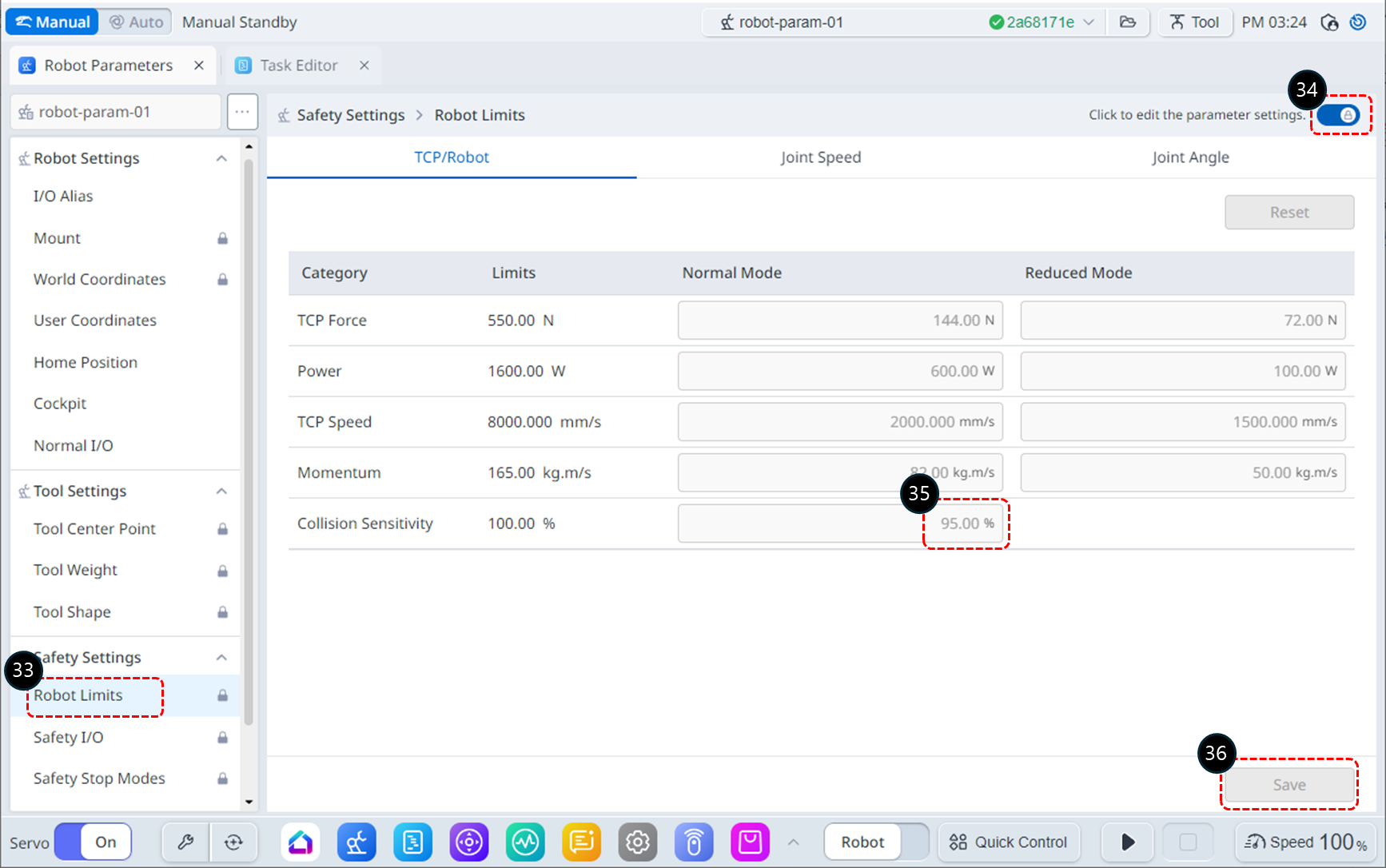
Selecteer Robotlimieten in Veiligheidsinstellingen.
De bewerkingsstatus van de parameters inschakelen. Als er een venster voor het invoeren van een wachtwoord wordt weergegeven, raadpleegt u stap 6–7.
Wijzig de botsingsgevoeligheid in 50%.
Klik op de knop Opslaan om de instellingen op te slaan. Als het venster Robotparameters nakijken verschijnt, controleert u de wijzigingen en klikt u op de knop Toepassen.
Selecteer het tabblad Taakeditor-module.
Schakel over naar de automatische modus om het taakprogramma uit te voeren.
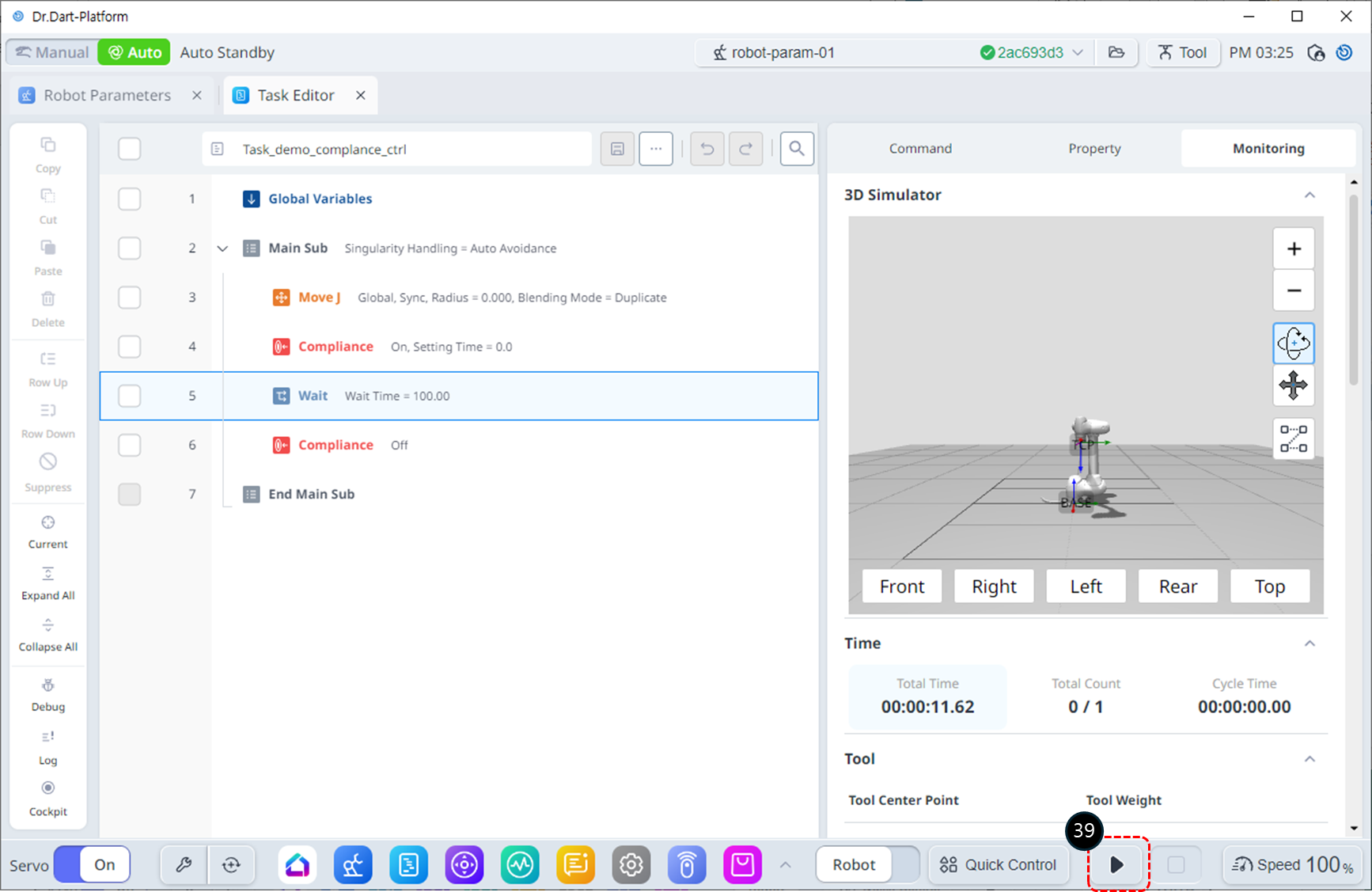
Klik op de knop uitvoeren. Duw tijdens de wachttijd het eindeffect van de robot voorzichtig naar het lichaam van de robot toe. De robot beweegt door de duwkracht en zodra u uw hand loslaat, keert hij terug naar zijn oorspronkelijke positie.