
Paneel uitlijnen
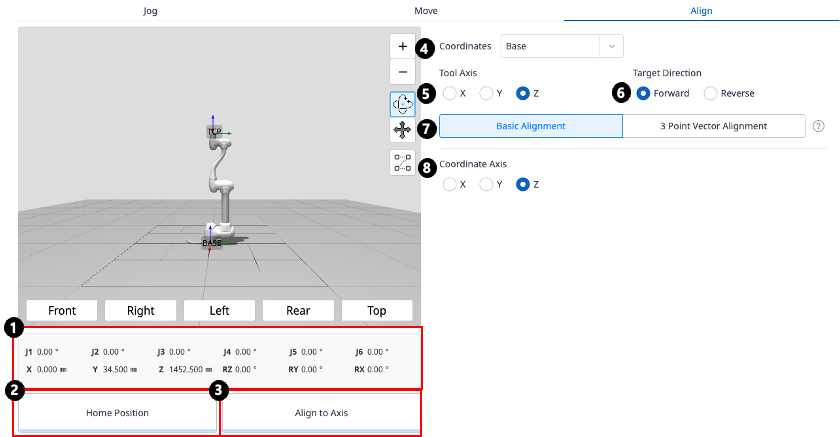

Menu
Items | Beschrijving | |
|---|---|---|
1 | Robothouding | Geeft de gezamenlijke houding en taakhouding van de huidige robot weer. |
2 | Knop ruststand | Hiermee wordt de robot naar de beginpositie verplaatst wanneer u hierop klikt. |
3 | Knop Uitlijnen | Hiermee lijnt u de robot uit wanneer u erop klikt. |
4 | Selecteer Referentie coördinatenstelsel | Selecteer het referentiecoördinatensysteem voor positionering. |
5 | Gereedschapsas | Selecteer de as van de TCP die u wilt uitlijnen. |
6 | Doelrichting | Selecteer de richting waarmee u de TCP wilt uitlijnen. |
7 | Uitlijningsmethode | Selecteer de uitlijningsmethode. |
8 | Coördinaat as | Selecteer op welke as van het referentiecoördinatensysteem u wilt uitlijnen. |
9 | Selecteer punten op een vlak | Selecteer drie punten die het vlak definiëren. 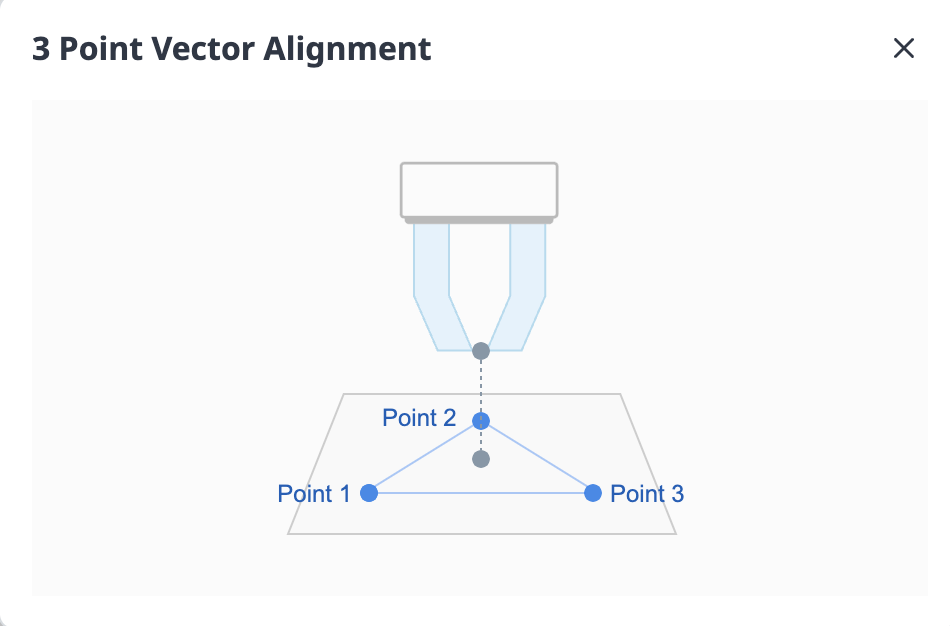 |
10 | Uitlijning doelpunt | Selecteer een punt om de TCP te positioneren. |