
Overzicht van servo aan
Servo aan verwijst naar een stand-bystatus waarin de robotarm kan worden aangedreven door de verbinding van stroom te voorzien. Servo uit wanneer een noodstopknop wordt ingedrukt of een veiligheidsbeperking wordt geschonden. In de servo uit-status wordt de verbinding uitgeschakeld en de robotarm kan niet worden aangedreven en de Task Editor, jog plus gekoppeld aan de robotarm aandrijving is uitgeschakeld in het hoofdmenu.
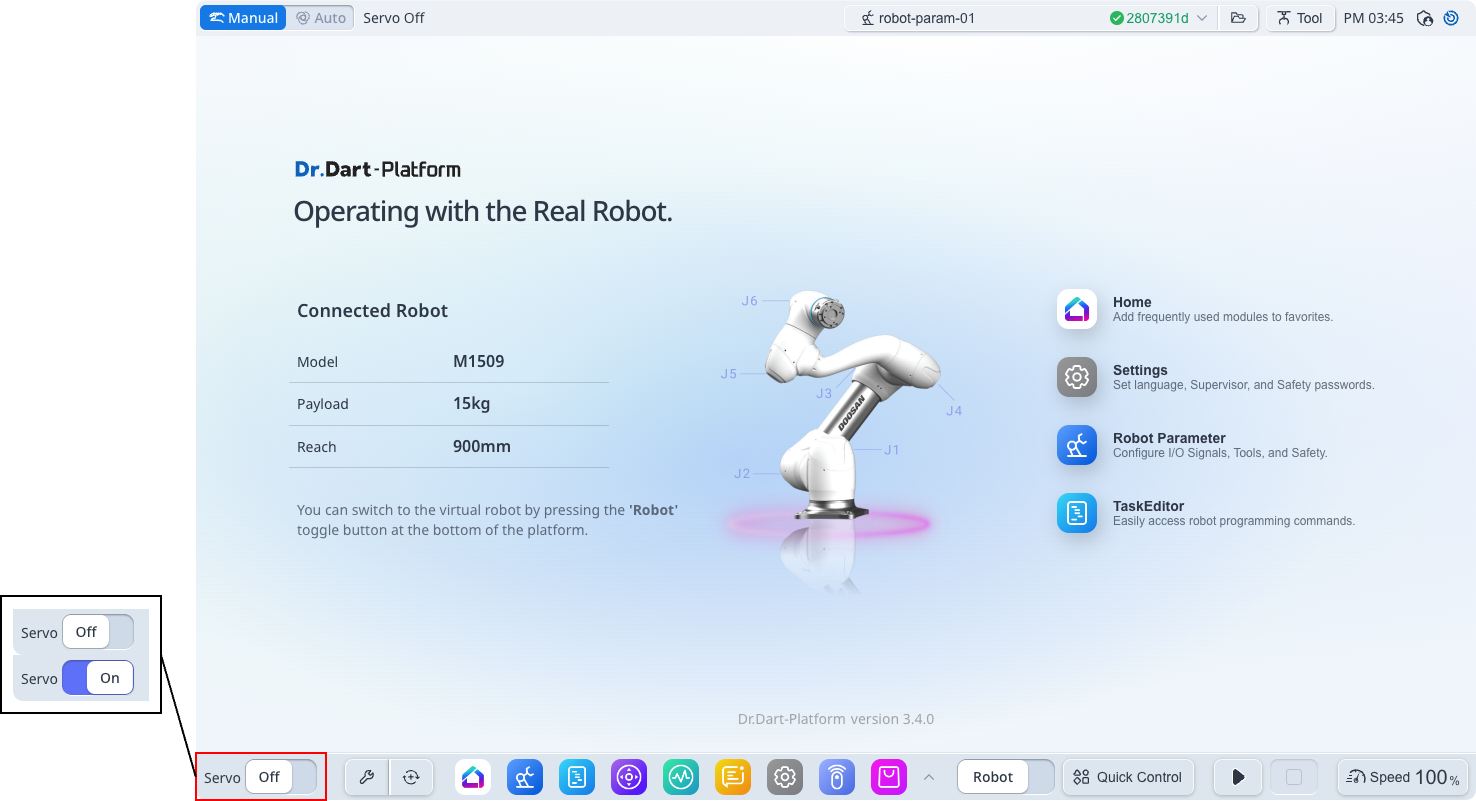
Als u wilt overschakelen van servo uit naar servo aan, tikt u op de knop Servo aan de linkerkant van het hoofdmenu onderaan.