
Meetmethoden en -omstandigheden
De stopafstand is de afgelegde hoek vanaf het moment dat een stopsignaal wordt gegenereerd tot het moment dat de bediening van de manipulator wordt gestopt.
Stoptijd is de tijd vanaf het moment dat een stopsignaal wordt gegenereerd tot het moment dat alle manipulators stoppen.
Gegevens over de stopafstand en stoptijd worden verstrekt voor verbinding 1, verbinding 2 en verbinding 3, die grote afstanden hebben.
De beweging van een overlappende as kan leiden tot een langere stopafstand.
Gegevens over de stopafstand en stoptijd worden gedefinieerd volgens KS B ISO 10218-1:2011 Declaration and Certification.
Categorie stoppen
Categorie stoppen | Beschrijving | |
|---|---|---|
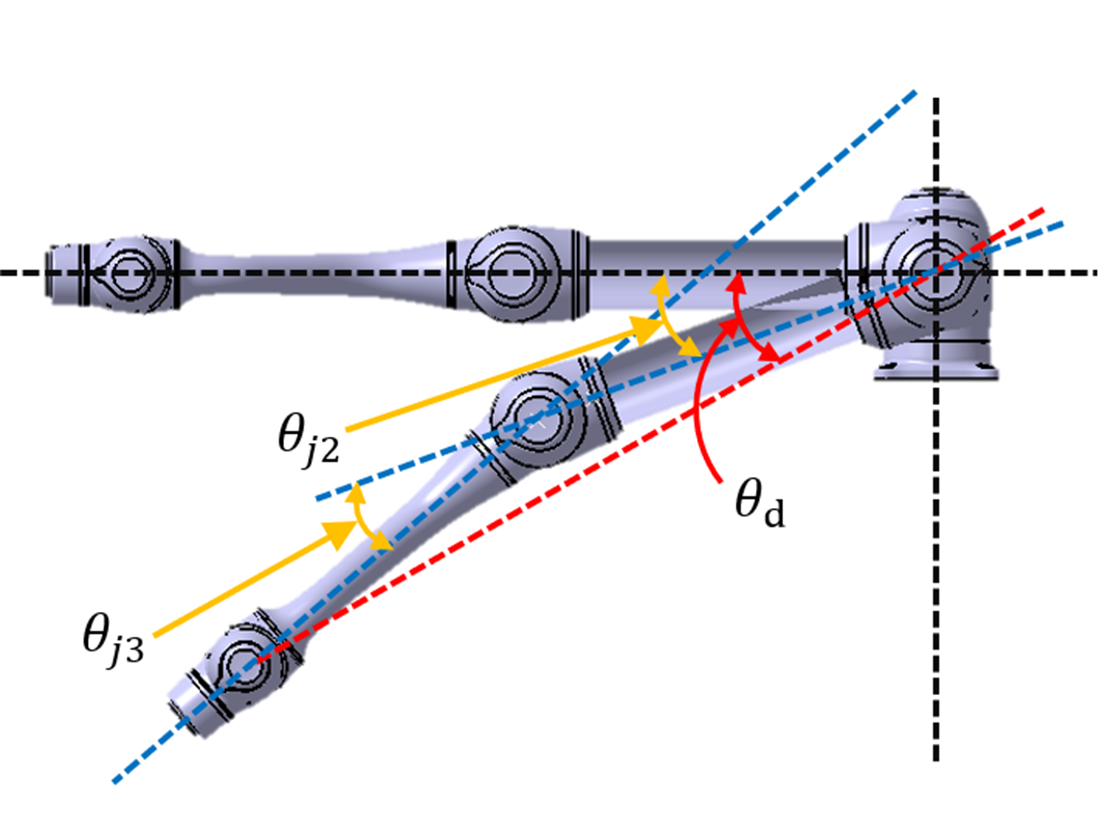
| 1 | Stop Categorie 0 | De stopafstand en stoptijd van gewricht 1 (basis) , gewricht 2 (schouder) en gewricht 3 (bochtstuk) worden gemeten bij maximale snelheid, rekhoogte en belasting. De assen van koppeling 2 en koppeling 3 lopen parallel aan elkaar, dus een botsing veroorzaakt door een geforceerde stop aan één kant kan leiden tot slip aan de andere kant. De hoekafwijking wordt ook gemeten. |
| 2 | Stop Categorie 1 | De stopafstand en stoptijd van gewricht 1 (basis) en gewricht 2 (schouder) worden gemeten bij respectievelijk 33%, 66% en 100% van de maximumsnelheid, het rekniveau en de belasting. De stopafstand en stoptijd van gewricht 3 (kniestuk) worden gemeten bij 33%, 66% en 100% van het maximumtoerental en de maximale belasting. Het uitrekken tijdens meting van gewricht 3 is maximaal vergrendeld vanwege de lengte van de onderste arm en de volledig vlakke pols. |
Meetposities en -omstandigheden
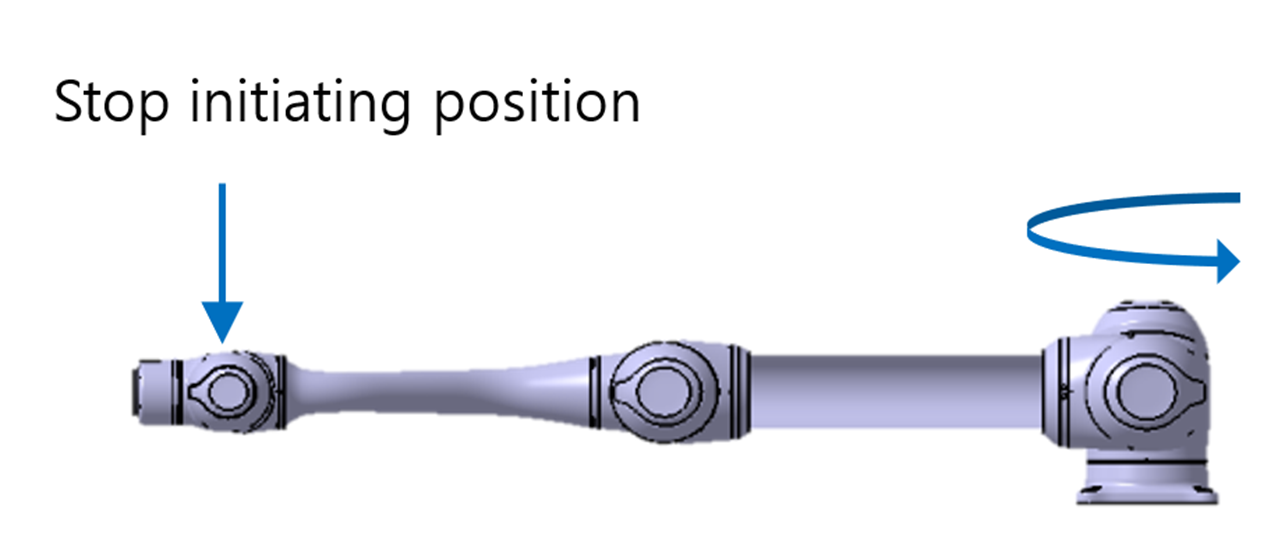
De meting van verbinding 1 wordt uitgevoerd met de roterende as loodrecht op de grond en tijdens horizontale beweging.
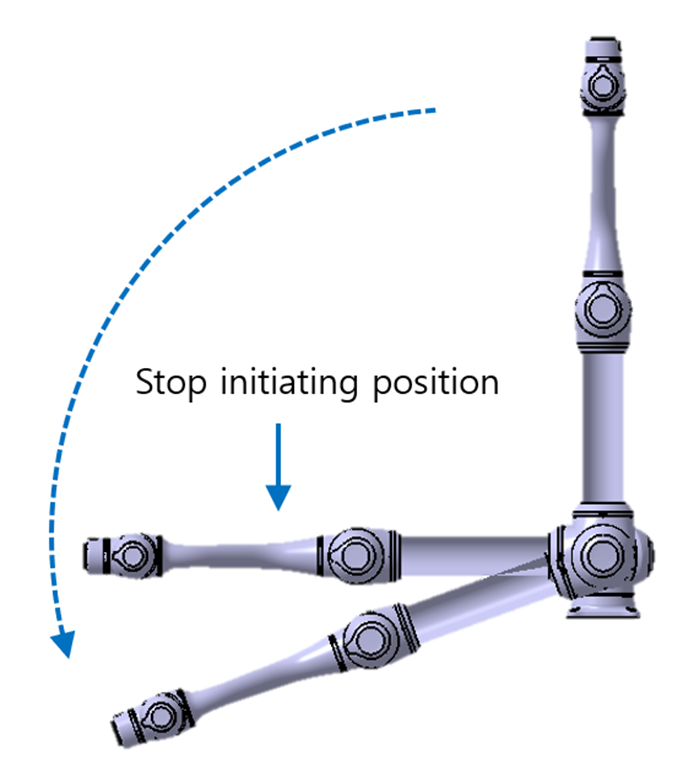
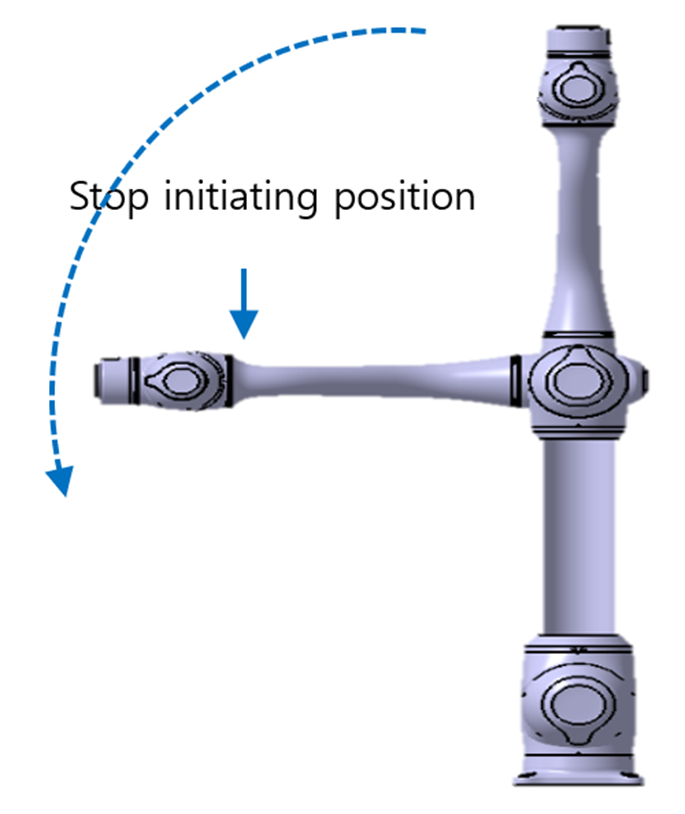
Metingen van verbinding 2 en verbinding 3 worden uitgevoerd met de roterende as parallel aan de grond en wanneer de robot wordt gestopt in een neerwaartse beweging verticaal ten opzichte van de grond.
Opmerking
De metingen zijn het resultaat van het slechtste geval. De meting kan variëren afhankelijk van de omstandigheden
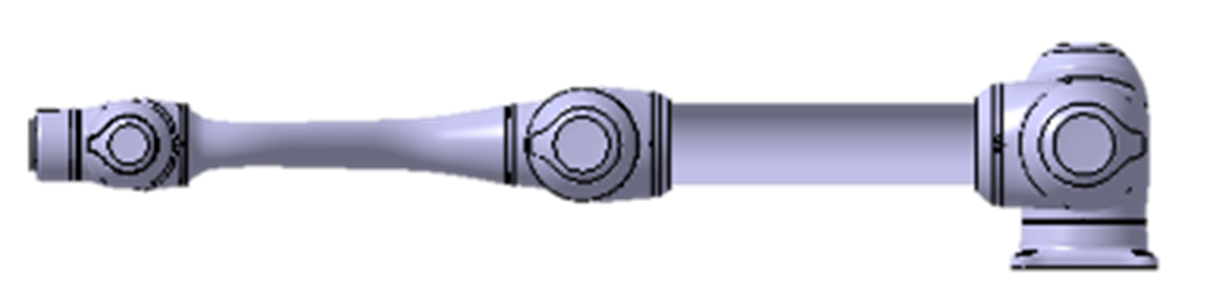
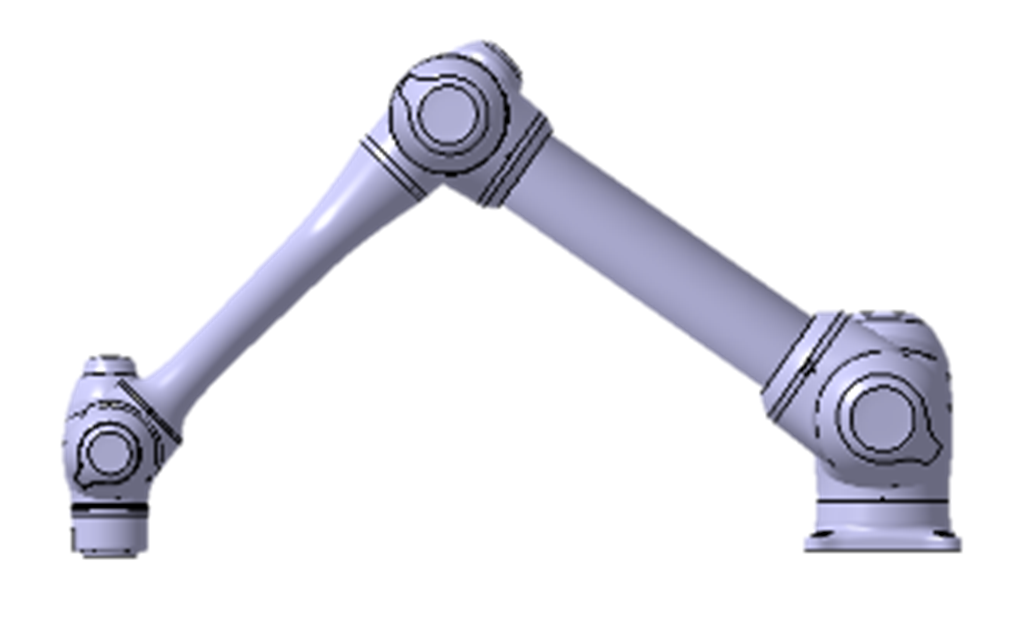
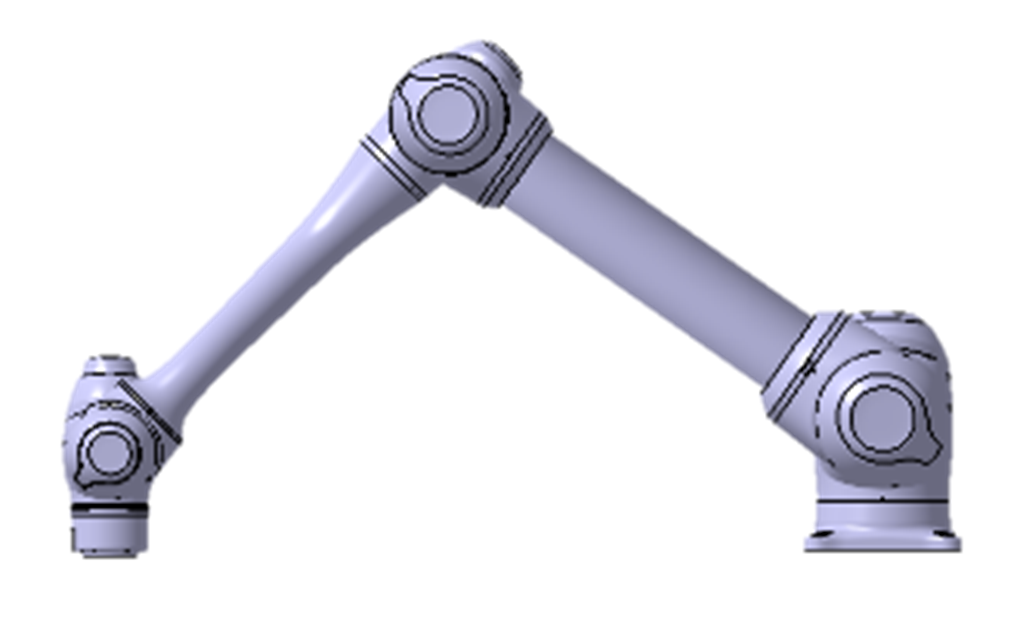
33%, 66% en 100% van de uitbreiding
| Verbinding 1 | Verbinding 2 | Verbinding 3 |
100% verlenging Stopcategorie 0 |
 |
 |
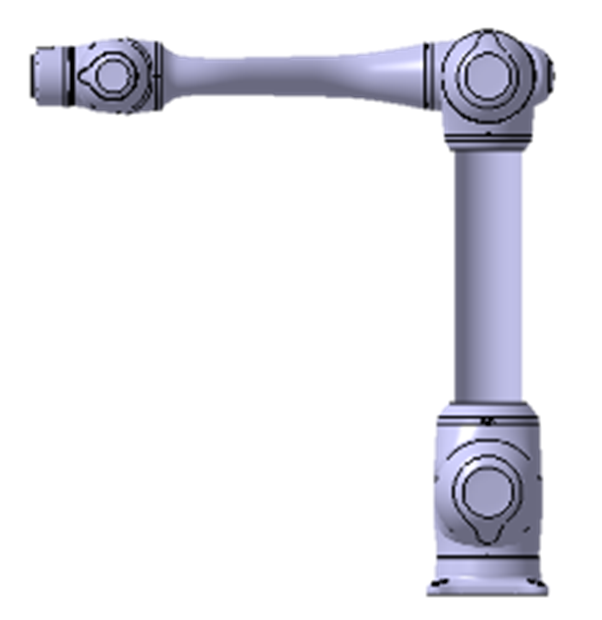 |
33% verlenging Stopcategorie 1 |
 |
 |
- |
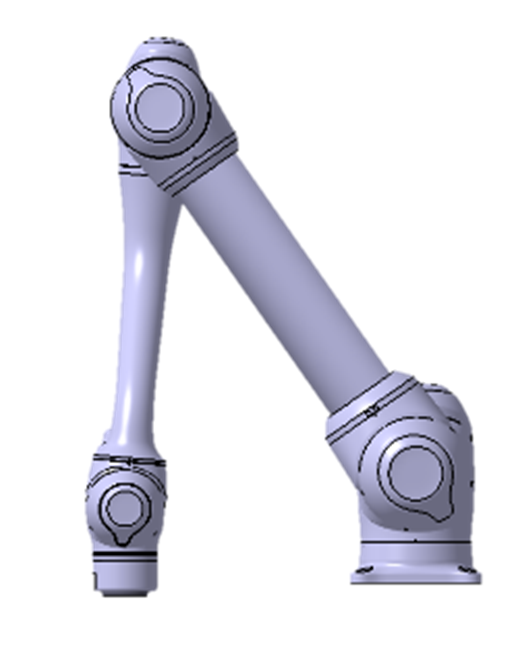
66% verlenging Stopcategorie 1 |
 |
 |
- |
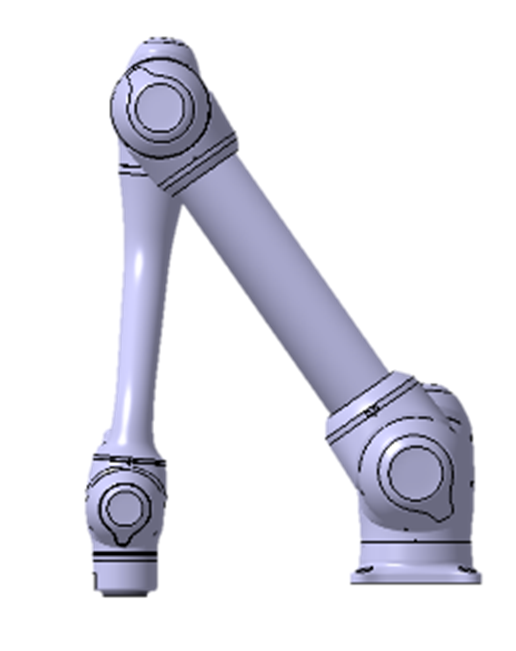
100% verlenging Stopcategorie 1 |
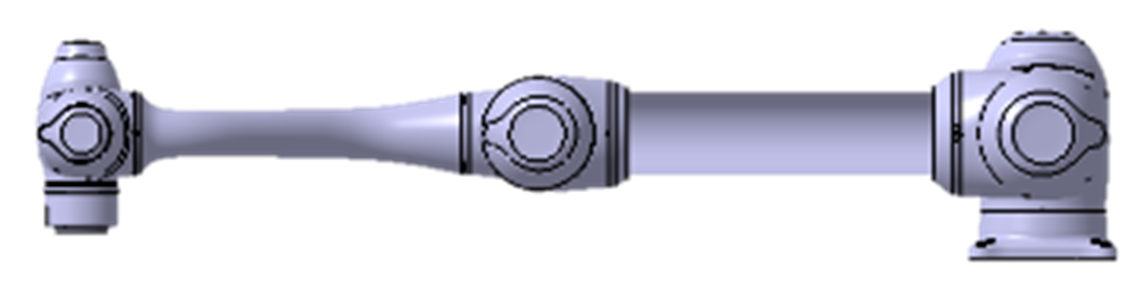 |
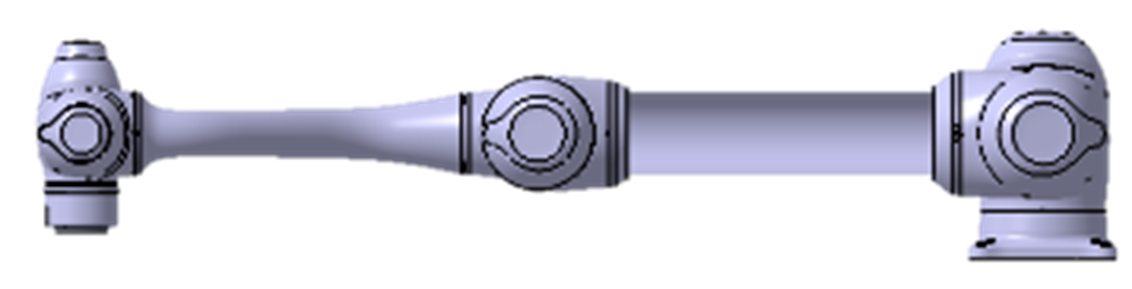 |
 |
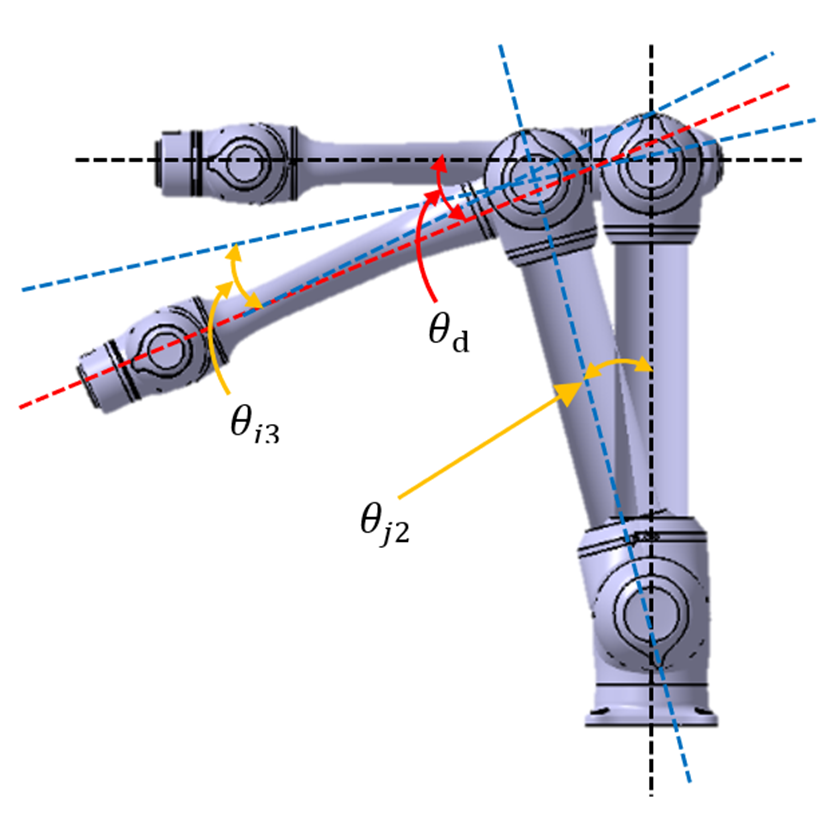
De pose wanneer de stop wordt gestart en de gemeten hoek (θd)
Poseren wanneer de stop wordt gestart | Gemeten hoek | |
JOINT1 |
 | Geen slip,
|
Joint2 |
 |
 |
JOINT3 |
 |
 |