Externe apparaten aansluiten
Externe apparaten aansluiten - Vision-sensor
De robot kan worden aangesloten op een vision sensor (2D camera voor het meten van de objectpositie), en de vision sensor metingen kunnen via een netwerk worden overgedragen naar de robot om te koppelen aan commando's van de robot.
Instelling vision-sensor
Instelling communicatieverbinding
Sluit de LAN-poorten van de apparaten aan en pas TCP/IP-communicatie toe om metingen van de vision-sensor naar de robot over te brengen. (Zie Netwerkverbindingnetwerkverbinding ) Stel het IP-adres van de vision-sensor in op TCP/IP 192.168.137.xxx band om TCP/IP-communicatie mogelijk te maken.
Vision-werkomgeving
Voor het uitvoeren van een meting van de objectpositie is het nodig om een beeldinvoer en visuele instructie van het doelobject te hebben met behulp van de vision-sensor. Raadpleeg het speciale programma voor het instellen van het gezichtsvermogen dat door de fabrikant van de vision-sensor wordt geleverd.
Instelling formaat meetgegevens
Om de meetgegevens van de vision-sensor te kunnen gebruiken in het robotwerk, moet de kalibratie van de vision-robotcoördinaten worden uitgevoerd, en dit moet worden uitgevoerd voordat met het instelprogramma voor de vision-sensor wordt begonnen. De meetgegevens van de vision-sensor moeten worden overgebracht met behulp van de volgende formaatinstellingen:
Opmaak | pos | , | x | , | y | , | hoek | , | var1 | , | var2 | , | … |
|---|
pos: Scheidingsteken dat het begin van de meetgegevens aangeeft (voorvoegsel)
x: X-coördinaatwaarde van het object gemeten met de vision-sensor
y: Y-coördinaatwaarde van het object gemeten met vision sensor
hoek: Rotatiehoekwaarde van het object gemeten met de vision-sensor
Var1 … VarN: Informatie gemeten met vision-sensor (bijv. objectafmeting / controlewaarde defect) voorbeeld) pos,254,5,-38.1,45.3,1,50.1 (beschrijving: X=254,5, y=-38,1, hoek=145,3, var1=1, var2=50,1)
Instelling robotprogramma
Wanneer de fysieke communicatieverbinding tussen de vision-sensor en de robot en de instelling van de vision-sensor is voltooid, moet een programma worden ingesteld om de vision-sensor en het robotprogramma te koppelen. Het is mogelijk om verbinding te maken/communicatie/besturingsfuncties van de externe vision-sensor met Doosan Robot Language (DRL), en het is mogelijk om het programma in te stellen in de Task Writer.
Details en uitgebreide voorbeelden van Doosan Robot Language (DRL) over externe vision sensor functies vindt u in de programmeerhandleiding.
Extern apparaat aansluiten – DART-platform
Het DART-platform is een software die wordt uitgevoerd op een Windows-desktop of -laptop. Zodra de controller en Desktop/laptop zijn aangesloten via de LAN-poort, zijn alle functies van de leerhanglamp beschikbaar vanaf het moment dat het DART-platform wordt uitgevoerd. Op dit moment is de volgende instelprocedure vereist om verbinding te maken met subcontrollers in de controller.
IP-adres zoeken en verbinding instellen
Instelling communicatieverbinding
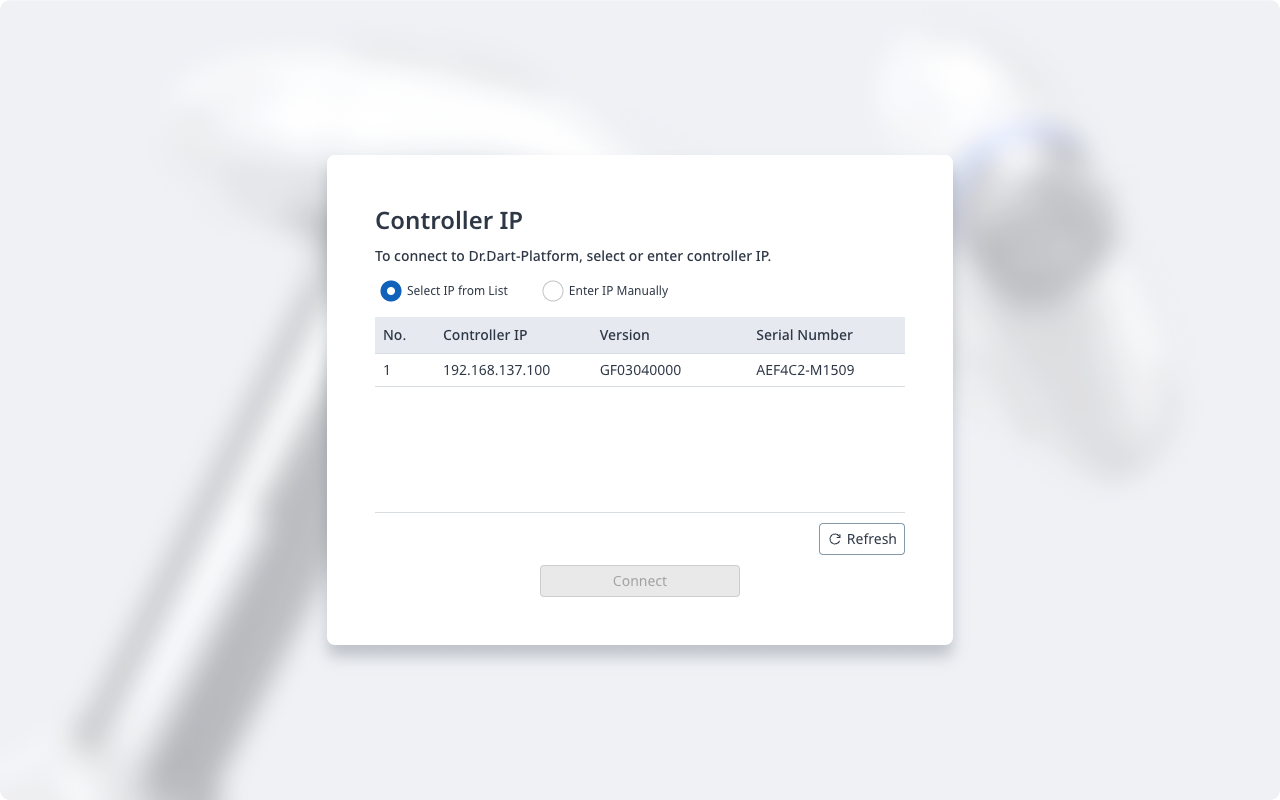
Wanneer het DART-platform wordt uitgevoerd nadat de laptop is aangesloten op de LAN-poort van de controller, wordt automatisch gezocht naar het IP-adres van de controller, de versie-informatie van de subcontroller en het serienummer van de robot dat nodig is om een verbinding tot stand te brengen.
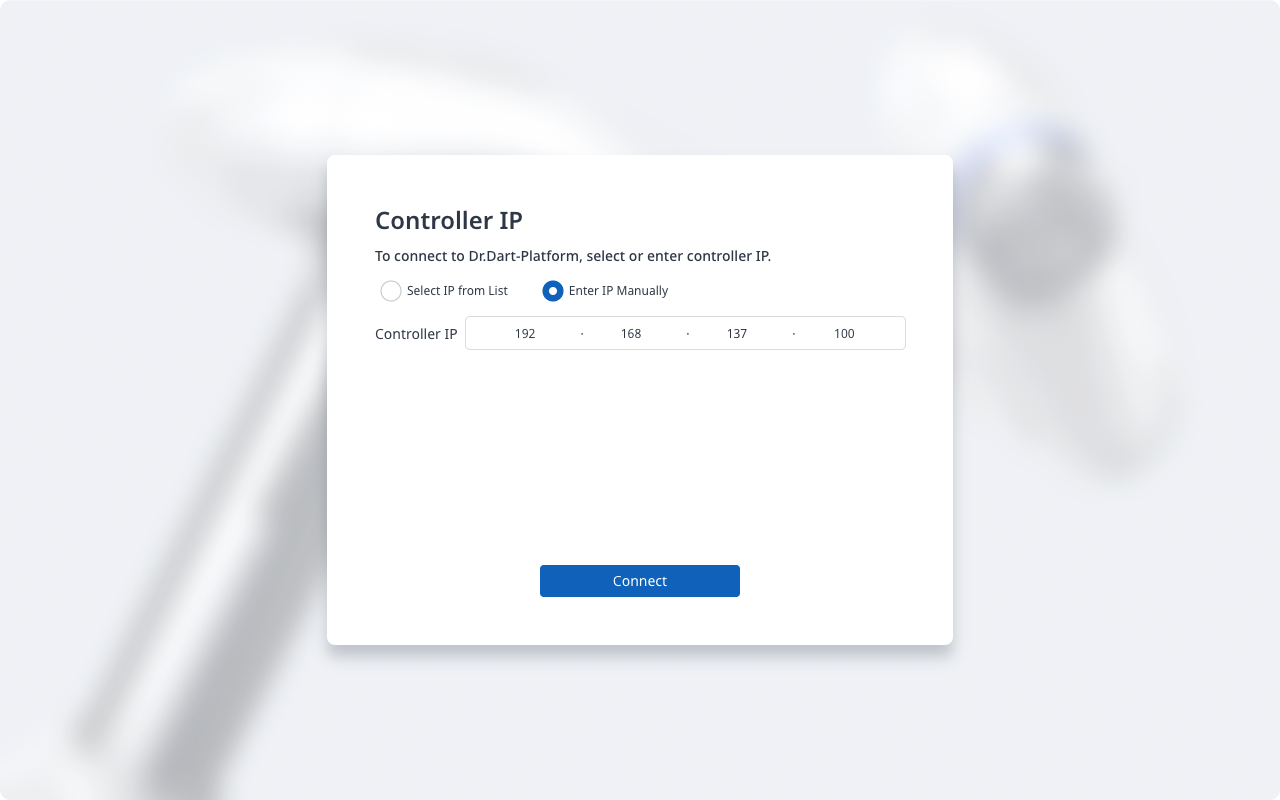
Als het zoeken mislukt, drukt u op de knop Vernieuwen om te vernieuwen of tikt u op IP handmatig invoeren om het IP-adres van de controller handmatig in te voeren.
Door het serienummer van de aan te sluiten robot te selecteren en op de knop verbinden te drukken, wordt een verbinding tot stand gebracht tussen het DART-platform en de subcontroller, waardoor de robot normaal kan worden bediend.
Als er een probleem is met de verbinding, probeert u de onderstaande procedure. Als dit probleem blijft bestaan, neemt u contact op met de verkoop- of servicemedewerkers voor hulp.
Als de zoekresultaten voor het IP-adres van de aansluitbare controller, de versie van de subcontroller en het serienummer van de robot niet worden weergegeven: Druk op de knop Vernieuwen om opnieuw te zoeken en probeer opnieuw verbinding te maken volgens de bovenstaande procedure.
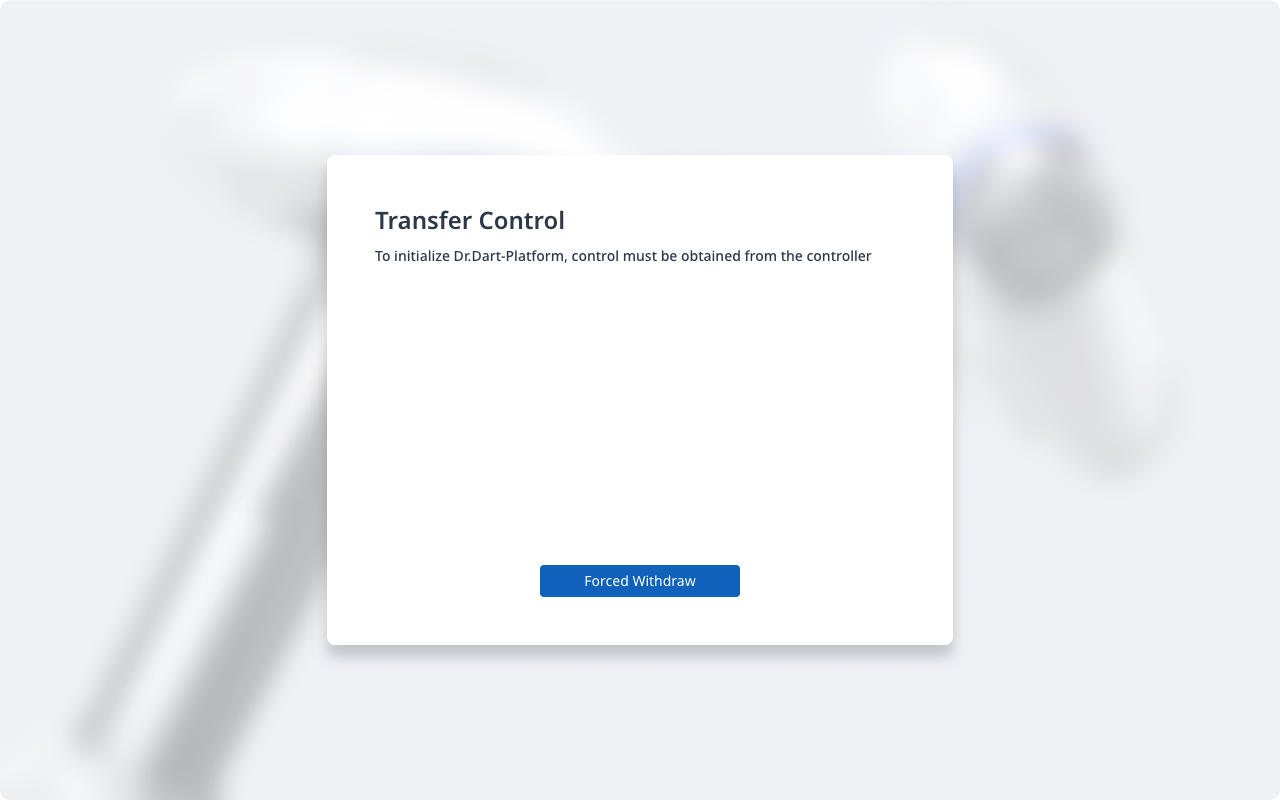
Als u vervolgens de pagina Transfer Control ziet zoals hieronder getoond, tikt u op de knop geforceerd terugtrekken om verbinding te maken met het platform.