
Scherm verplaatsen
Menu-indeling verplaatsen
| Item | Description | |
|---|---|---|
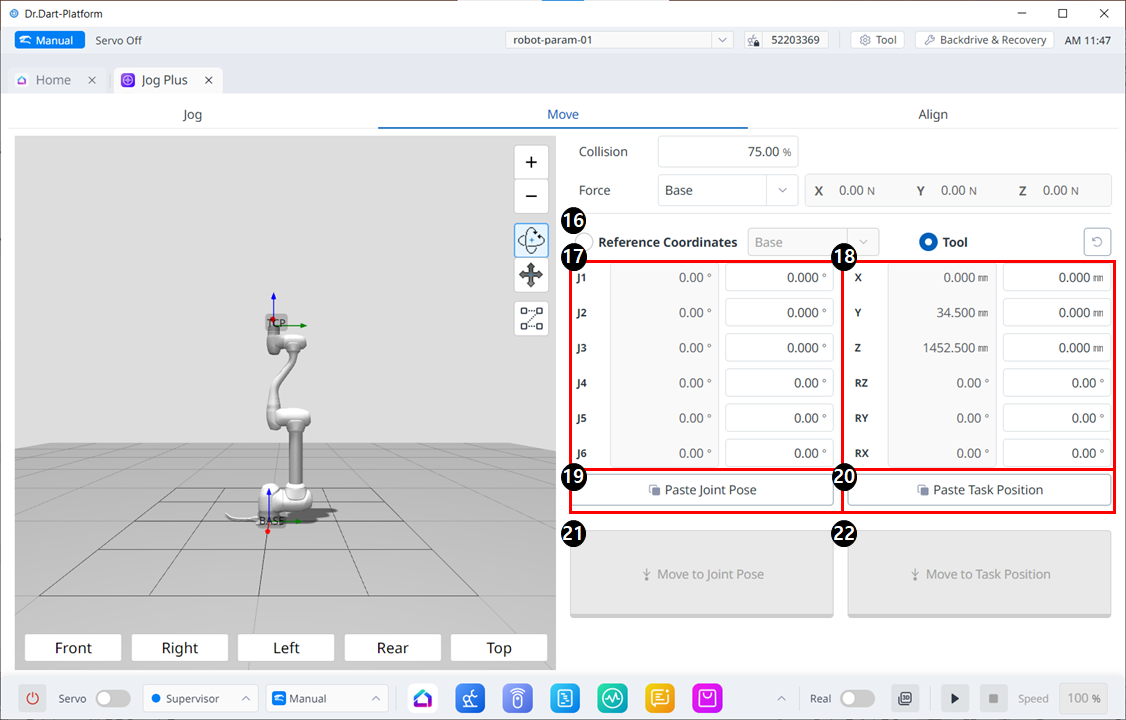
| 16 | Reference Coordinates | Selecteer het referentiecoördinatensysteem dat moet worden gebruikt voor de taakcoördinaten in Figuur 18. U kunt Basis-, Wereld- of Gebruikercoördinaten kiezen. |
| 17 | Joint Posture | Geeft de huidige robothouding en de beoogde gewrichtshouding weer. |
| 18 | Task Posture | Geeft de huidige robothouding en de beoogde taakhouding weer die passen bij het geselecteerde referentiecoördinatensysteem. |
| 19 | Paste Joint Posture | Plak de naar het klembord gekopieerde houdingswaarde in het gewrichtshoudingpaneel. |
| 20 | Paste Task Posture | Plak de naar het klembord gekopieerde houdingswaarde in het taakhoudingspaneel. |
| 21 | Joint Move button | Deze knop zorgt ervoor dat de robot naar de beoogde gewrichtshouding beweegt. |
| 22 | Task Move button | Deze knop zorgt ervoor dat de robot naar de beoogde taakhouding beweegt. |