
로봇-용접기 간 모션-용접 연동 신호
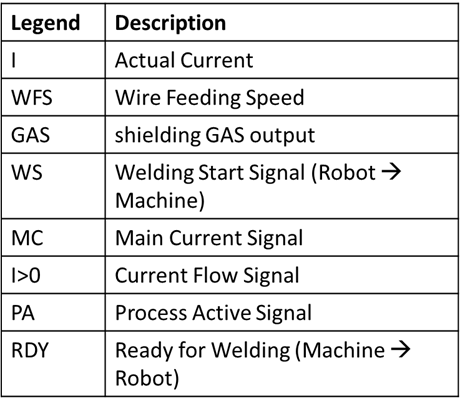
- 용접기와의 연동신호 순서도 및 신호의 명칭은 다음과 같습니다.
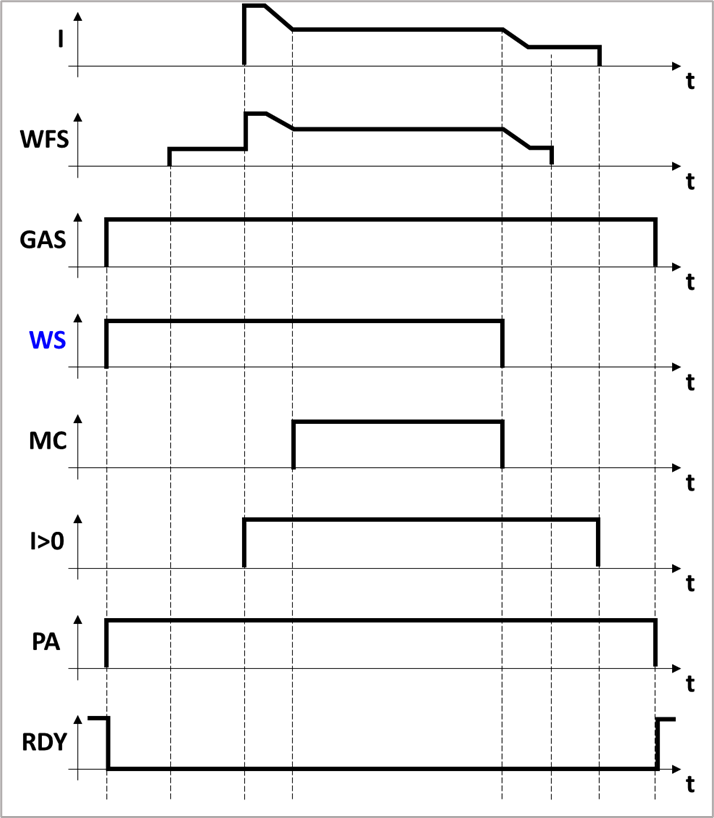
로봇에서 용접기로 보내는 제어기와 용접기간 통신 시퀀스 및 모션 연동은 아래표와 같습니다.
순서
제어기
통신 방향
용접기
1.디지털 용접기 용접 조건 셋팅 완료
←
- machine ready(1) : machine ready 사용 선택 시
- 용접 조건 완료
→
2.제어기 준비 완료
- error reset(1) : error reset 사용 선택 시
→
3.용접 시작
- welding start(1)
→
- 용접기로부터 해당 신호 수신 완료 시 모션 시작 3)
←
- current flow(1)
- main current(1) : main current 사용 선택 시
- machine ready(0) : machine ready 사용 선택 시
- process active(1) : process active 사용 선택 시
4.용접 종료
- welding start(0)
→
- 용접기로부터 해당 신호 수신 완료 시 모션 종료 4)
←
- current flow(0)
- main current(0) : main current 사용 선택 시
- machine ready(1) : machine ready 사용 선택 시
- process active(0) : process active 사용 선택 시
- 로봇 모션 시작은 용접기로부터 current flow 신호에 연동이 되나 main current 항목 설정 시 해당 신호와 연동이 됩니다.
- 로봇 모션 종료는 용접기로부터의 current flow 신호와 연동이 되나 process active 혹은 machine ready 항목 설정 시 해당 신호와 연동이 됩니다.