
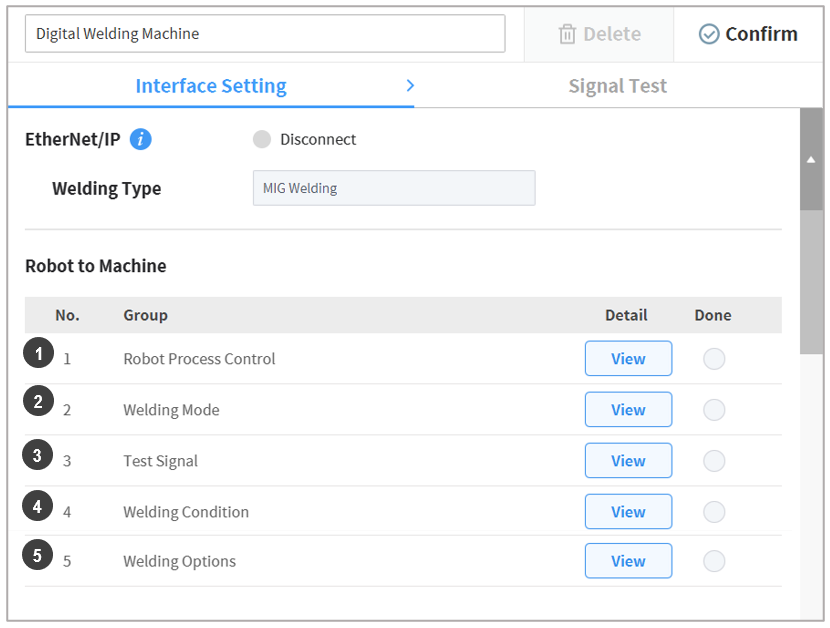
로봇에서 용접기로의 신호 (Robot to Machine)
로봇에서 용접기로 보내는 신호들을 설정합니다. 아래의 그림에서 ➊Robot Process Control, ➋Welding Mode, ➌Test Signal, ➍Welding Condition, ➎Welding Options신호 설정을 합니다.
번호 | 항목 | 설명 |
|---|---|---|
1 | Robot Process Control | (필수 설정 항목 포함) 용접작업 시 로봇-용접기 간 연동을 위한 신호 중 로봇에서 용접기로 전송하는 신호를 설정합니다. 용접작업 시작(Welding Start), 로봇 레디(Robot Ready), 용접기 에러 초기화(Error Reset) 신호가 포함됩니다. |
2 | Welding Mode | 용접 모드 및 작동 모드 신호를 설정하며, 용접기에서 제공하는 경우에 해당 모드신호를 설정하여 활용할 수 있습니다. 세부 모드에 대해서는 사용하고자 하는 용접기의 매뉴얼을 참고해주세요.
|
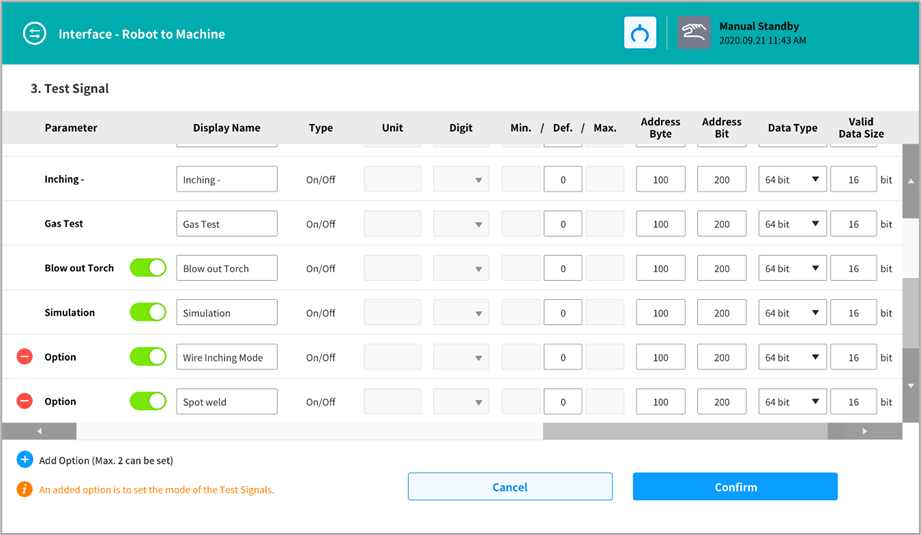
3 | Test Signal | (필수 설정 항목 포함) 와이어인칭(+/-) (Inching +, Inching -), 보호가스테스트(Gas Test), 토치청소(Blow out Torch), 모의용접모드(Simulation) 신호에 대해 설정합니다. 필요한 2개의 항목을 더 추가하여 설정할 수 있습니다. |
4 | Welding Condition | 용접기에 저장된 시너직(Synergic) 조건번호 및 용접작업번호를 선택하고, 용접 중 세부조건을 조정할 수 있는 신호를 설정합니다. 용접작업번호(Job Number), 시너직조건번호(Synergic ID), 와이어피딩속도(WFSpeed), 전압조정(Voltage Correction), 동적특성조정(Dynamic Correction)가 있습니다.. |
5 | Welding Options | 필요한 항목들을 추가하여 설정할 수 있습니다. 최대 15개를 추가할 수 있습니다. |
알아두기
그룹별 필수 설정 항목을 설정하지 않으면, 신호 테스트(Signal Test)탭으로 이동할 수 없습니다.
EtherNet/IP 인터페이스 설정 항목을 사전에 구성할 수 있습니다. 설정된 항목들은 용접 조건 설정 시에 자동으로 구성되어 표시됩니다.
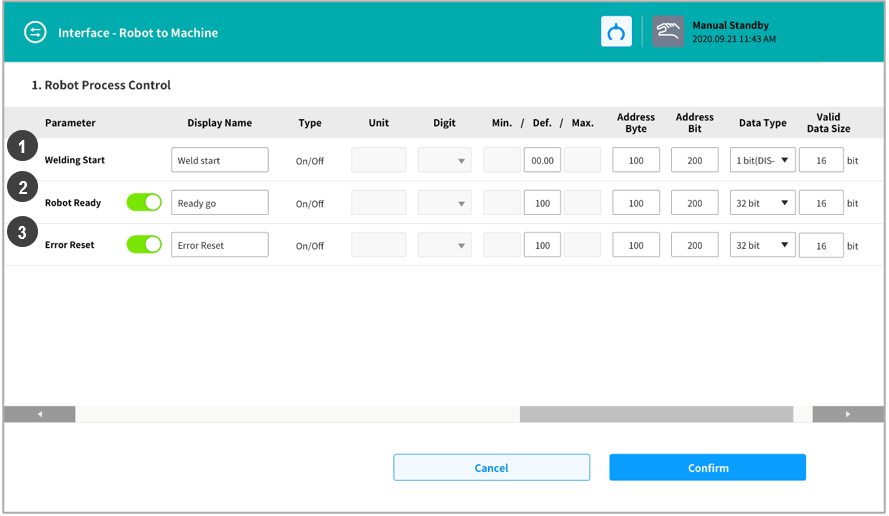
각 항목별 사용 여부, Display Name, Type, Unit, Digit, Min./Def./Max., Address Byte, Address Bit, Data Type, Valid Data Size를 설정할 수 있습니다.

번호 | 항목 | 설명 |
|---|---|---|
1 | Enable 버튼 | 해당 항목의 사용/비사용 여부를 설정합니다. 그룹 별 필수 설정 항목은 해당 버튼이 없습니다. |
2 | Display Name | 용접 조건 설정 등에서 해당 항목 사용시 표시하는 이름을 설정합니다. 용접기별로 사용되는 이름이 서로 다르므로 이 항목에 연결하고자 하는 용접기의 해당 기능 이름을 입력하면 유용합니다. 영문기주 최대 20자를 입력할 수 있습니다. |
3 | Type | 기능의 입력 방식을 설정합니다.
|
4 | Unit | 기능의 단위를 설정합니다. |
5 | Digit | 입력 값의 자릿수를 설정합니다. (1 / 0.1 / 0.01) |
6 | Min./Def./Max | 최소값/기본값/최대값을 설정합니다. |
7 | Address Byte | 통신을 위한 Data의 시작 위치를 설정합니다. |
8 | Address Bit | 통신을 위한 Data의 시작 위치를 설정합니다. |
9 | Data Type | 통신 Data의 크기를 설정합니다. (1-bit(disable Low), 1-bit(disable High), 2-bit, 4-bit, 8-bit(byte), 15-bit, 16-bit(short), 32-bit(int)) |
10 | Valid Data Size | 유효한 Data의 크기를 설정합니다. |
알아두기
위의 용접조건 항목들의 용어와 설정 방식이 각 용접기별 사양마다 상이 할 수 있습니다. 각 용접기별 데이터시트를 참고하여 필요에 맞게 설정 및 활용하시기 바랍니다.
Group 1) 용접공정 제어신호 (Robot Process Control)
번호 | 항목 | 설명 |
|---|---|---|
1 | Welding Start | 용접작업 시작(Welding Start) |
2 | Robot Ready | 로봇 레디(Robot Ready) |
3 | Error Reset | 용접기 에러 초기화(Error Reset) 신호가 포함됩니다.. |
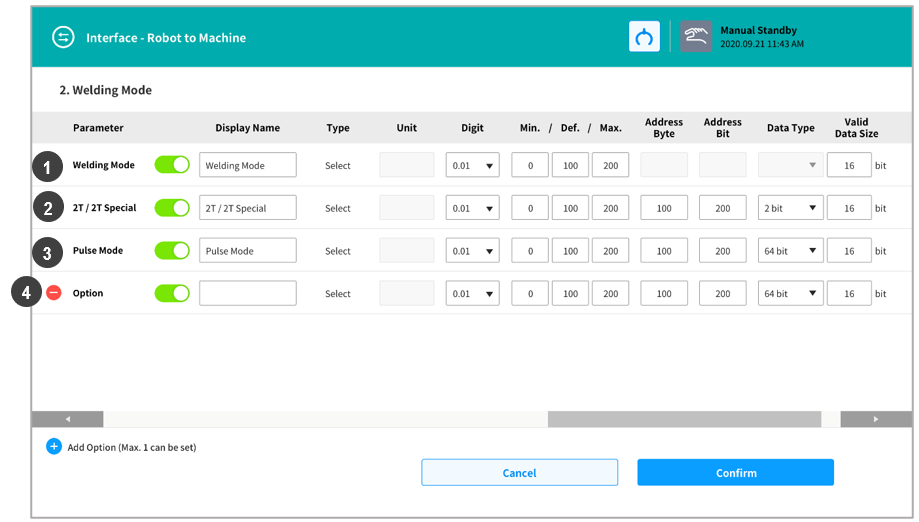
Group 2) 용접모드 (Welding Mode)
번호 | 항목 | 설명 |
|---|---|---|
1 | 용접 모드 | 용접기 고유의 용접모드 설정을 지정합니다. 예를 들어 ‘Fronius’용접기의 Working mode에 대응됩니다. |
2 | Latched/non-lached 모드 | 용접기 고유의 용접 작업모드 설정 신호입니다. 주로 용접 시작/끝 조건 설정 (2T / 2T Special)를 지정합니다. 예를 들어 ‘EWM’용접기의 operating mode (latched/non-latched mode)에 대응됩니다. |
3 | 펄스모드 | 펄스 용접 모드 사용 여부를 지정합니다. |
4 | 옵션모드 | 기본적으로 제공하는 모드 지정 항목 외에 추가적으로 모드 변경하고자 하는 항목을 추가할 때 활용가능 합니다. 옵션 항목 추가는 하단 Add Option 버튼을 이용하여 추가 가능합니다. |
Group 3) 테스트신호 (Test Signal)
Group 4) 용접조건 설정 (Welding Condition)
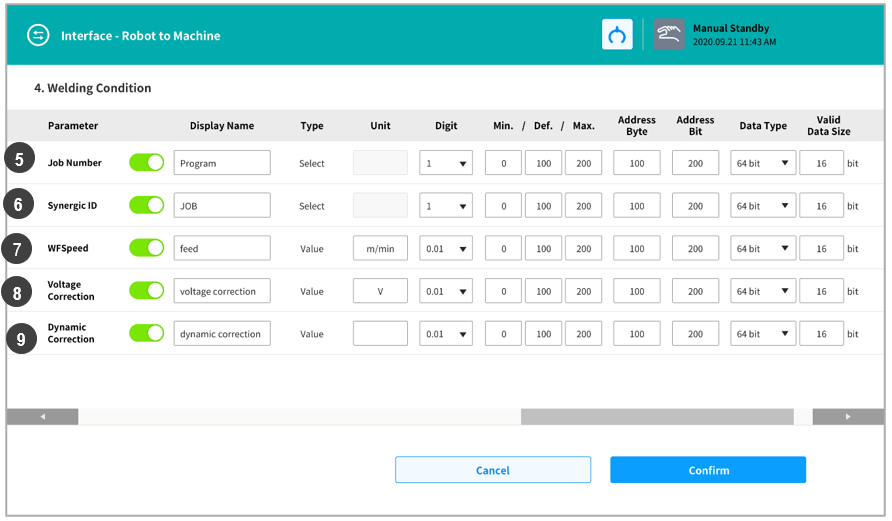
번호 | 항목 | 설명 |
|---|---|---|
5 | JOB번호 | 용접기에 저장되어 있는 용접조건에 해당하는 JOB번호 값을 지정합니다. |
6 | 시너직(SYNERGIC) 번호 | 용접기에서 제공하는 시너직 기능의 연동을 위해 용접환경조건을 저장한 프로그램 번호 값을 지정합니다. |
7 | 송급속도 조절 | 와이어 송급속도 값을 지정합니다. |
8 | 전압조정 | 용접 중 전압조정 값을 지정합니다. |
9 | 동적변수조정 | 용접 중 용접기의 동적변수조정 값을 지정합니다. |
Group 5) 기타 옵션 신호 (Welding Options)
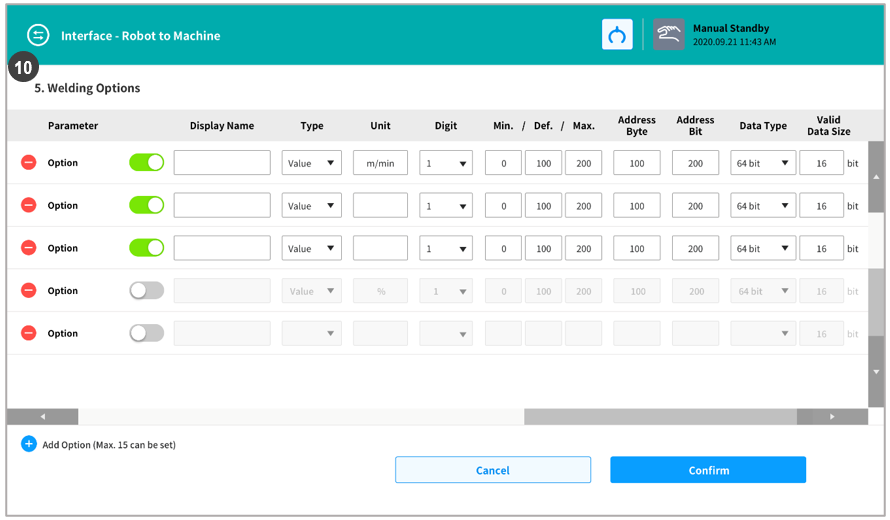
번호 | 항목 | 설명 |
|---|---|---|
10 | 옵션1 ~ 옵션15 | 기본적으로 제공하는 용접조건 항목 외에 추가적으로 용접조건으로 지정하고자 할 때 활용가능 합니다. |