
프로젝트 다운로드 및 Run
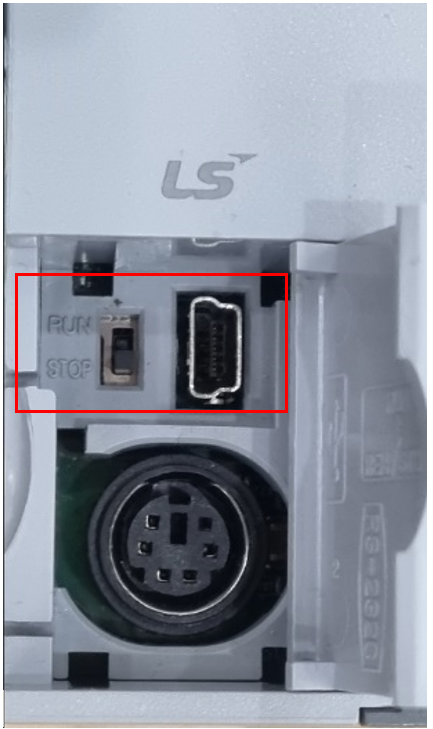
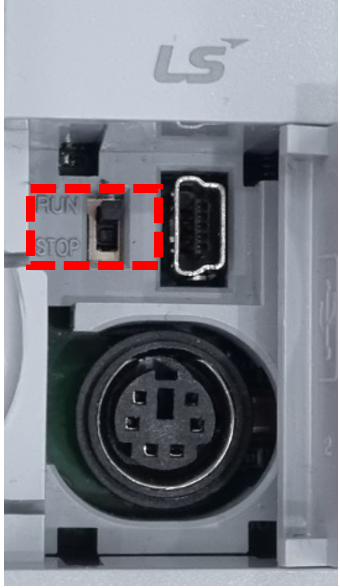
프로젝트를 다운로드하기 전 PLC의 와 PC와 USB CABLE로 연결합니다. 그리고 아래 사진과 같이 PLC의 동작모드를 STOP상태로 변경합니다.
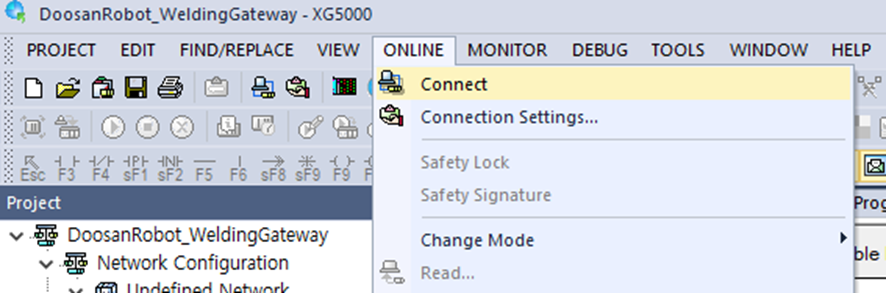
아래 그림과 같이 Menu중 ONLINE → Connect를 클릭하여 PLC와 Online상태로 변경합니다.
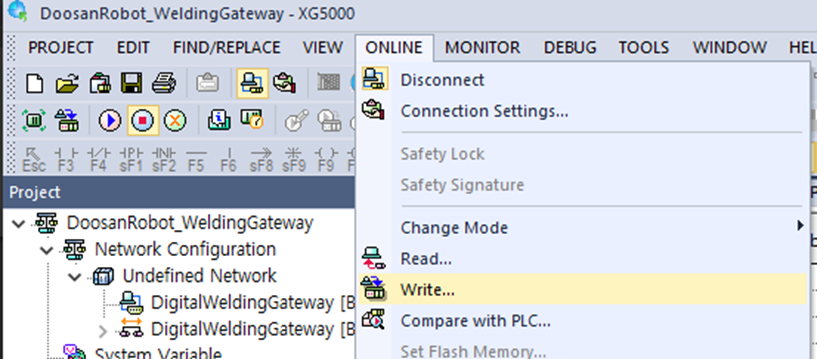
PLC와 Online상태가 완료되면 Connect메뉴가 Disconnect로 변경됩니다. 이후 현재까지 작업한 Project를 PLC에 다운로드를 합니다.
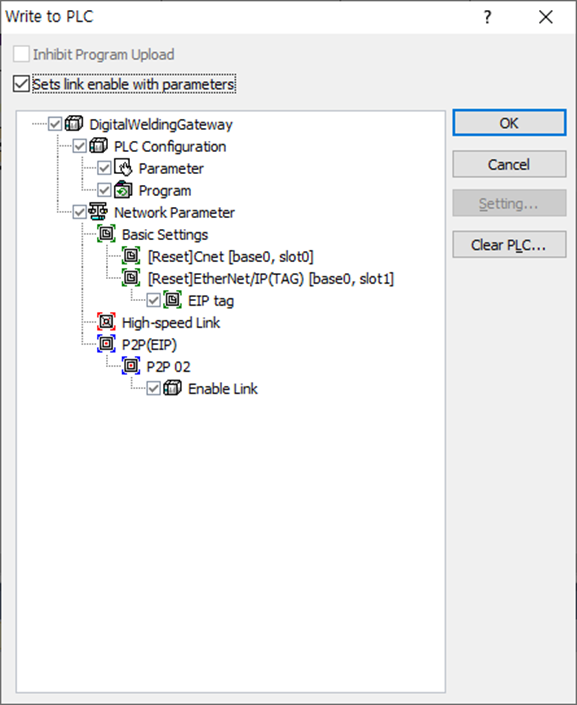
Write를 클릭하면 아래와 같은 창이 출력되며 이때 Set link enable with parameters를 체크 후 OK버튼을 클릭합니다.
다운로드가 완료되면 아래와 같이 PLC를 Reset할 것이냐는 창이 출력되며 확인 버튼을 눌러 PLC를 Reset합니다.
이 후 다시 PLC와 Online상태로 변경 후 모니터링을 시작을 실시합니다.
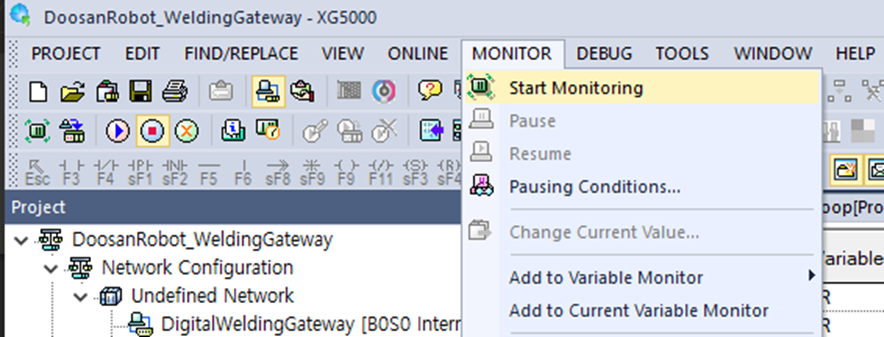
모니터링 기능을 활성화 후 변수 모니터링창을 출력 후 아래와 같은 변수에 대해서 모니터링을 실시합니다.
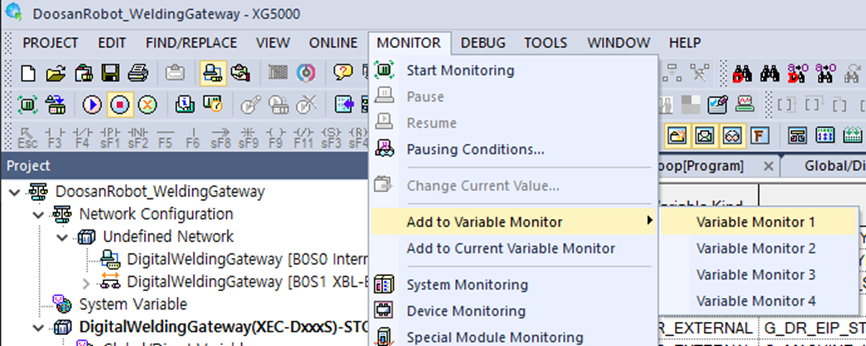
변수 중 _P2P2_NDR00와 _P2P2_NDR02, G_MACHINE_IN, G_MACHINE_OUT변수를 등록하여 로봇과 용접기와의 통신이 수립되었는지 확인합니다.
아래와 같이 모니터링 시 반드시 PLC모드를 Run상태로 변경합니다.
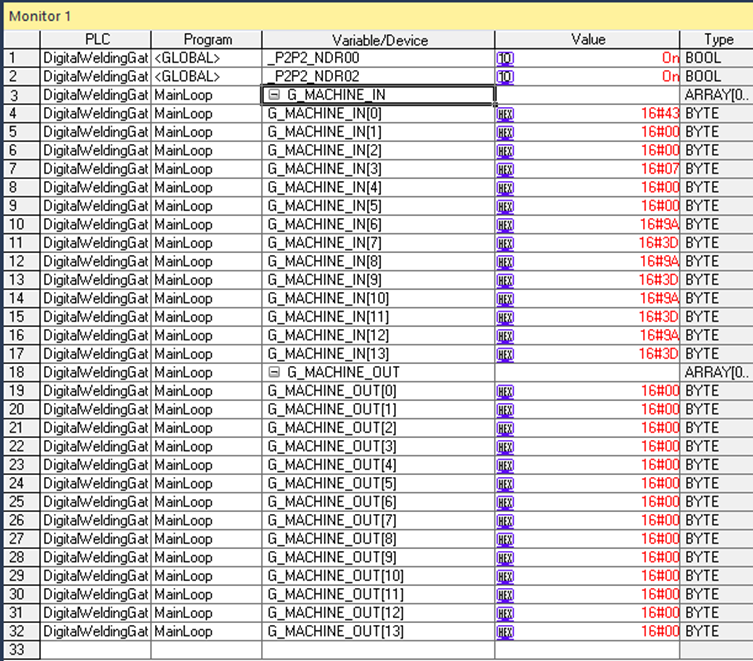
위와 같이 _P2P2_NDR00와 _P2P2_NDR02가 On상태일 시 정상적으로 로봇과 용접기가 연결이 된 상태를 의미합니다.
이후 다시 이전에 STOP상태로 변경된 DIP SWITCH를 RUN상태로 변경을 하게 되면 이 후부터 PLC는 전원이 들어와 있을 시 자동으로 Gateway역할을 수행하게 됩니다.
알아두기
통신설정이 완료되고 PLC와 연결된 상태에서 로봇의 SW update를 하는 경우 PLC를 재부팅하여야 정상적으로 연결되어 동작합니다.