
팩/언팩 사용하기
메뉴 항목
| 항목 | 설명 | |
|---|---|---|
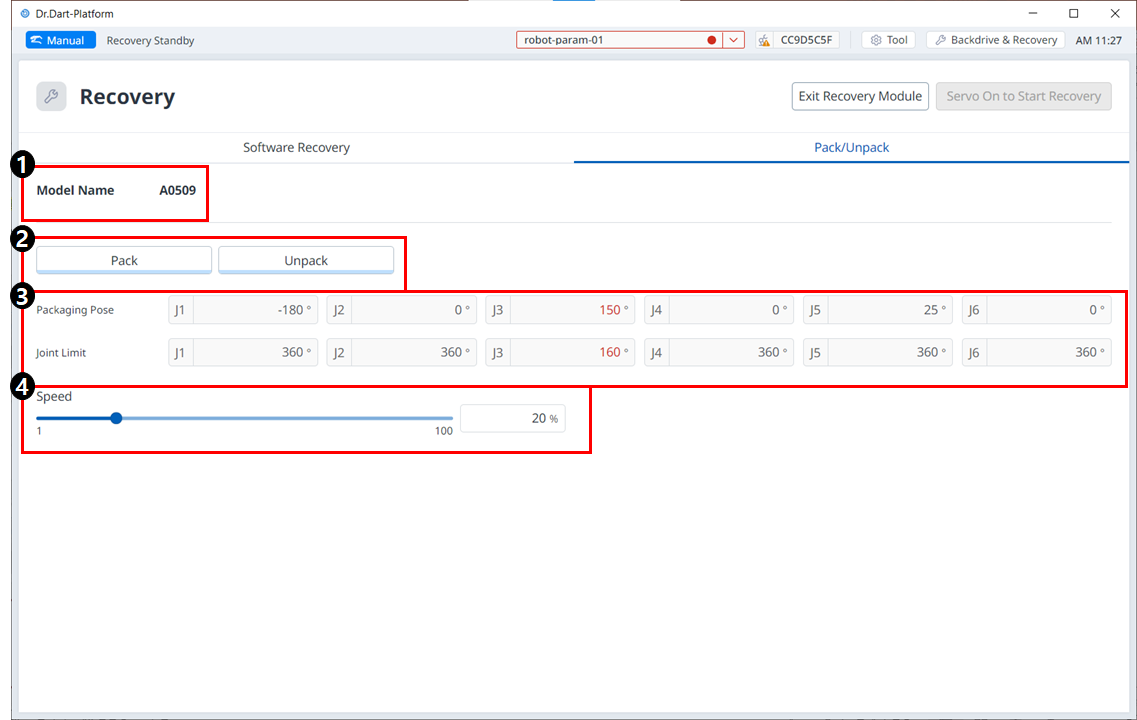
| 1 | 모델 이름 | 연결된 로봇 모델의 이름이 나타납니다. |
| 2 | Pack/Unpack | Pack과 Unpack 중 하나를 선택할 수 있습니다. |
| 3 | Packaging Pose/Joint Limit | 자세 및 조인트 제한치 값이 나타납니다. |
| 4 | Speed Ratio | 팩 혹은 언팩 모드의 속력을 슬라이더 혹은 입력을 통해 조절할 수 있습니다. |
패키징 모드를 설정하려면:
- 헤더 창에서 Recovery 메뉴를 탭 하십시오.

- 패키징 모드 탭을 선택하십시오.

- Servo On to Start Recovery 버튼을 탭 해 패키징 모드를 활성화하십시오.

- 설정된 패키징 포즈로 로봇이 자동으로 이동합니다.
- Pack 버튼으로 로봇을 팩 자세로 만들거나 Unpack 버튼으로 Default Home Position을 만들 수 있습니다.