
로봇 고정하기
매니퓰레이터 베이스에 있는 Ø8.5 mm 구멍 4개에 M8 볼트를 이용하여 고정하십시오.
볼트를 고정할 때에는 20Nm의 토크로 볼트를 조이는 것을 권장합니다. 진동에 의한 풀림 방지를 위해서 와셔(스프링-평) 사용하시기 바랍니다.
매니퓰레이터를 고정된 위치에 정확하게 설치해야 하는 경우에는 Φ5의 위치 결정 핀을 이용하면 원하는 위치에 설치할 수 있습니다.
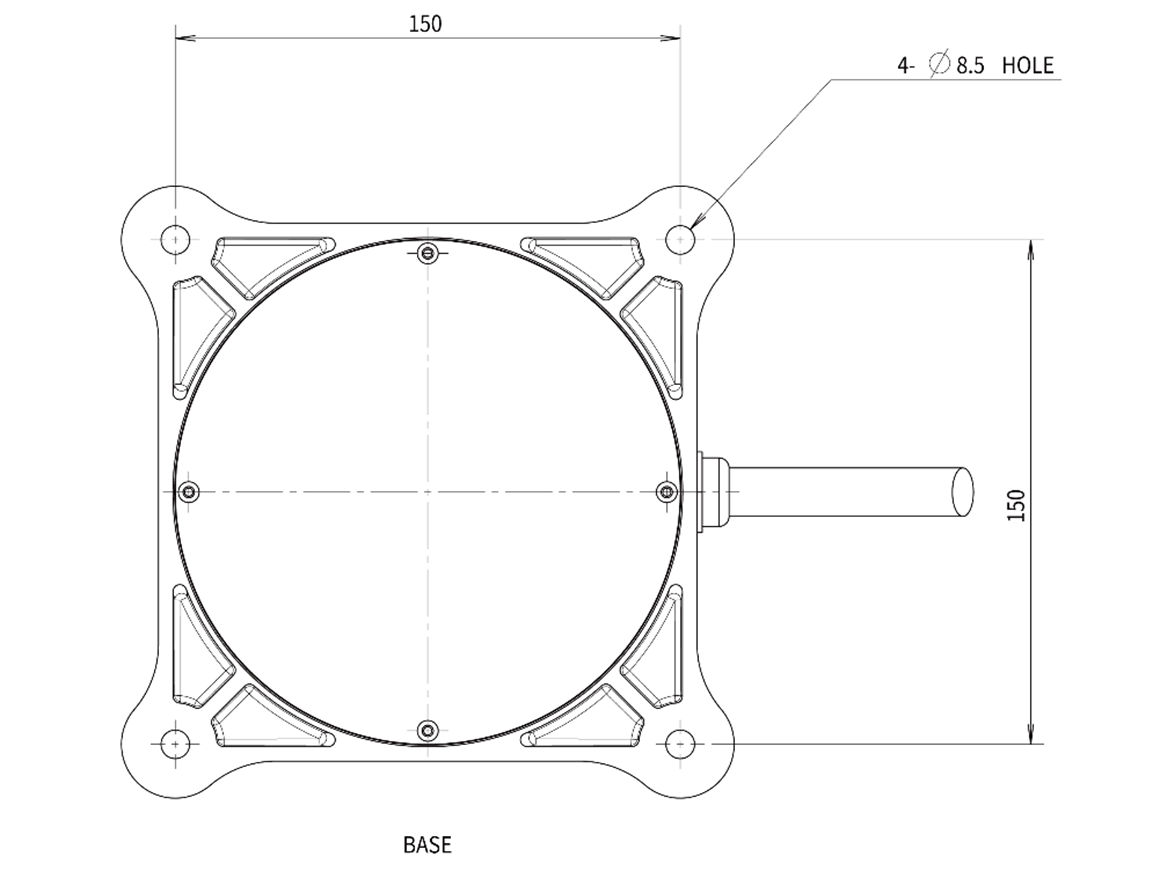
매니퓰레이터 베이스 도면, M8 볼트 4개 사용. 단위[mm]
경고
매니퓰레이터가 작동할 때, 볼트가 풀리지 않도록 끝까지 조이십시오.
매니퓰레이터의 베이스는 로봇의 무게와 로봇이 작동할 때 발생하는 하중(로봇 최대 토크의 10배 및 로봇 중량의 5배)을 견딜 수 있는 견고한 면에 설치하십시오.
매니퓰레이터 베이스에 진동이 발생하면 로봇은 자동으로 충돌이라고 판단하여 비상정지합니다. 그러므로 자동으로 위치가 이동되는 곳에 설치하는 경우 이동 가속도가 높은 장소에는 설치하지 마십시오.
매니퓰레이터를 올바른 방법으로 확실한 위치에 마운팅하십시오. 마운팅 표면은 견고해야 합니다.
매니퓰레이터가 장시간 물에 닿으면 손상될 수 있으니 젖을 수 있는 환경이나 수중에서 사용하지 마십시오.