
Mount
로봇 설치 자세(Mount) 메뉴에서 로봇 설치 자세를 설정할 수 있습니다. 로봇이 평평한 바닥에 설치되는 경우에는 이 과정을 건너뛸 수 있습니다.
로봇 설치 자세는 Robot Parameters > Robot Settings > Mount 를 선택하여 설정할 수 있습니다.
- 자동 계산(Auto Measure) 기능을 사용하여 설치 각도를 측정할 수 있습니다. 단 경사가 5도 미만일 경우 자동 계산은 사용이 불가능합니다.
- 천장 또는 벽에 Robot을 고정 할 때, Y 축의 회전과 Z 축의 회전으로 Robot의 설치 각도를 설정할 수 있습니다.
- 툴 무게 자동 계산 사용 시 툴 무게는 중력 기반으로 측정이 되기 때문에 Mount 설정 후에는 툴 무게를 다시 설정하시기를 권장합니다.
주의
- 로봇 설치 자세(Mount) 워크셀 아이템을 설정하는 경우 월드 좌표계도 같이 변경하시는 것을 권장합니다. 월드 좌표계를 변경하지 않는 경우 티치펜던트의 로봇 시뮬레이터 화면에서 로봇의 자세는 평평한 바닥에 설치한 자세(기본)로 표시됩니다.
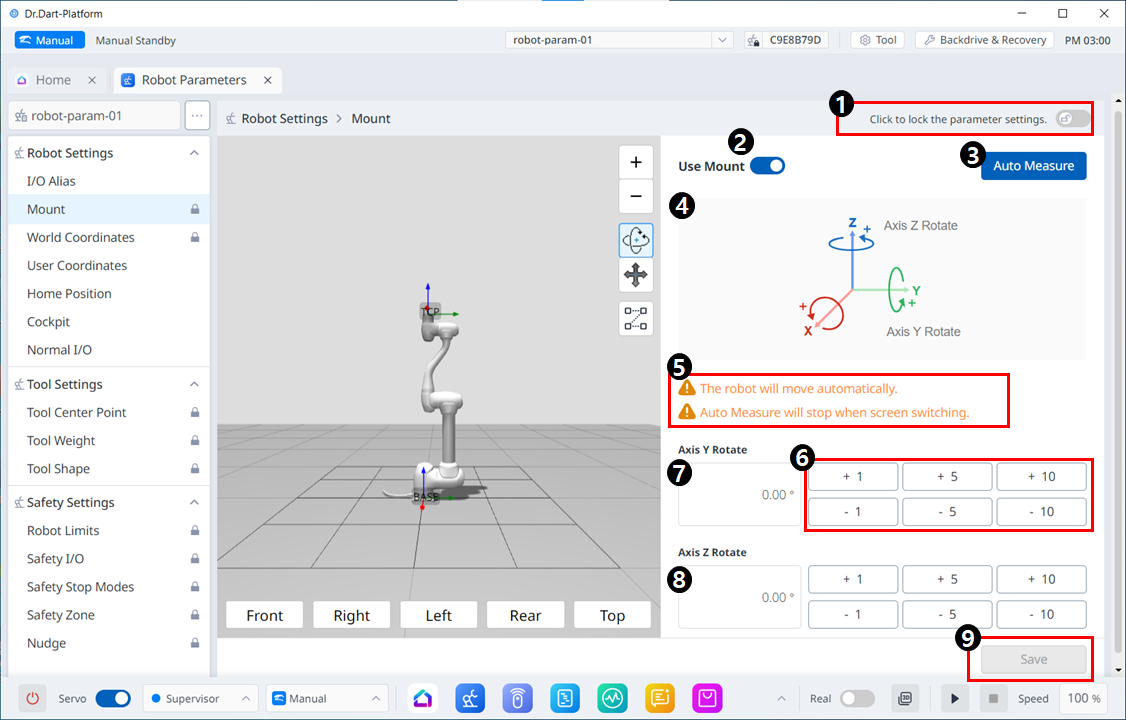
메뉴 구성
| 항목 | 설명 | |
|---|---|---|
| 1 | 잠금 토글 버튼 | 설정된 값이 잠금 상태가 됩니다. 수정을 위해서는 Safety Password 입력이 필요합니다. |
| 2 | Use Mount | Mount 사용을 활성화 하는 버튼입니다. 버튼의 활성화는 잠금을 푼 이후 가능합니다. |
| 3 | Auto Measure | 명령 내려진 작동을 자동으로 합니다. 옆의 3D Simulation에서 이 움직임이 나타납니다. |
| 4 | Information Image | Mount를 위한 팁 이미지입니다. |
| 5 | Information Message | Auto Measure를 위한 팁 메세지입니다. |
| 6 | Increment/Decrement 버튼 | 원하는 수치만큼 Increment 혹은 Decrement 가능합니다. |
| 7 | Y축 Rotate Input Field | Y축 회전 각도를 직접 입력할 수 있습니다. |
| 8 | Z축 Rotate Input Field | Z축 회전 각도를 직접 입력할 수 있습니다. |
| 9 | Apply 버튼 | 설정한 값들을 적용할 수 있습니다. |