오일러 각(Euler Angle) 알아보기
오일러 각(Euler Angle)이란 물체의 방향을 서로 수직인 X, Y, Z 축의 각도로 표현하는 방법 중 하나 입니다. 이때 A, B, C는 순차적인 회전 각도를 의미합니다. 로봇 브랜드 마다 이 A, B, C 회전의 순서를 Rz-Ry-Rz, Rz-Ry-Rx 그리고 Rx-Ry-Rz 등으로 다르게 정의합니다.
Rz-Ry-Rx를 예로 들면, Rz는 Z축에서의 회전(Rotation), Ry는 Y축에서의 회전(Rotation), Rx는 X축에서의 회전(Rotation)을 의미합니다. Rz로 A각도, Ry로 B각도 그리고 다시 Rx로 C각도를 순서대로 회전하면 물체의 현재 회전 방향을 나타낼 수 있습니다. 여기서 중요한 점은 최초로 기준 좌표계에서 Z축으로 회전한 이후부터는 새로운 좌표계를 기준으로 회전한다는 점입니다.
이를 1~4의 과정으로 시각화하여 설명할 수 있습니다.
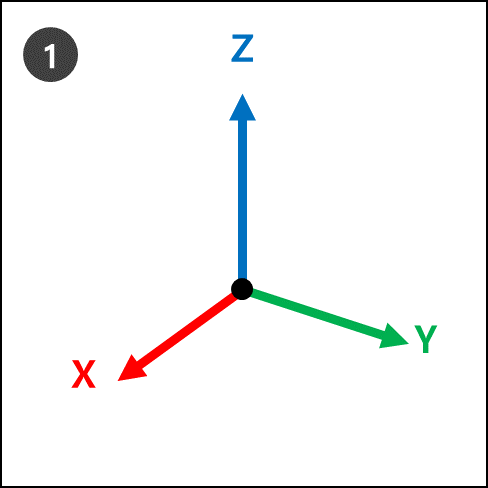
다음과 같이 기준 좌표계(X, Y, Z)가 있습니다.
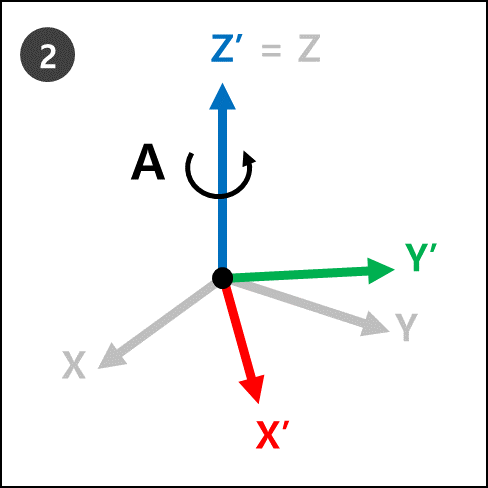
Rz : Z축을 중심으로 A 각도 만큼 회전 합니다.
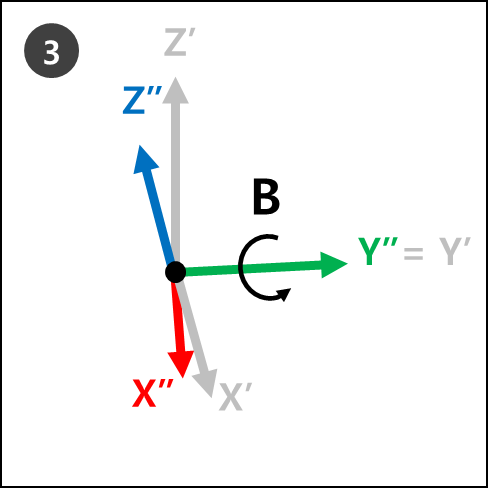
Ry : 과정 2의 새 좌표계(X', Y', Z')에서 새로운 Y축(Y'축)을 중심으로 B 각도 만큼 회전 합니다.
Rx : 과정 3의 새 좌표계(X'', Y'', Z'')에서 새로운 X축(X''축)을 중심으로 C 각도 만큼 회전 합니다.
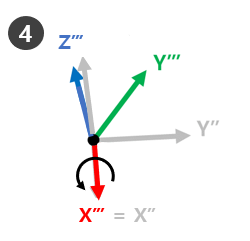
과정 4의 새 좌표계(Z''', Y''', X''')가 오일러 회전각 A, B, C를 적용했을 때 현재 로봇의 회전을 의미합니다.
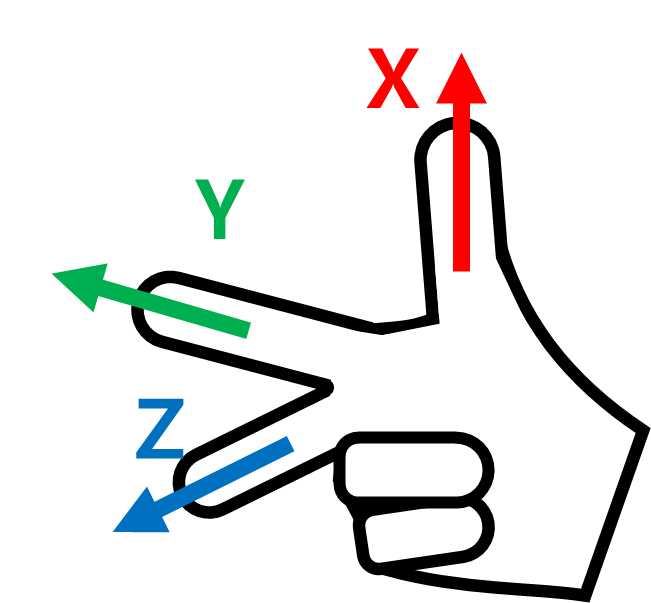
이를 오른손으로 간단하게 시각화할 수 있습니다. 오른손을 다음과 같이 만드십시오. 이를 오른손의 법칙이라고 부르며 엄지(X축), 검지(Y축), 중지(Z축) 세 손가락이 서로 90도를 이루도록 만들면 서로 수직인 X, Y, Z 축의 좌표계와 동일해집니다.
이제 오른손을 오른손 법칙 데카르트 자세로 만들고 Rz, Ry, Rx 순서대로 회전을 해보십시오.
Rz : 중지 손가락(Z축) 주위로 A각도를 회전 합니다.
Ry : 검지 손가락(Y축) 주위로 B각도를 회전 합니다.
Rx : 중지 손가락(X축) 주위로 C각도를 회전 합니다.
알아두기
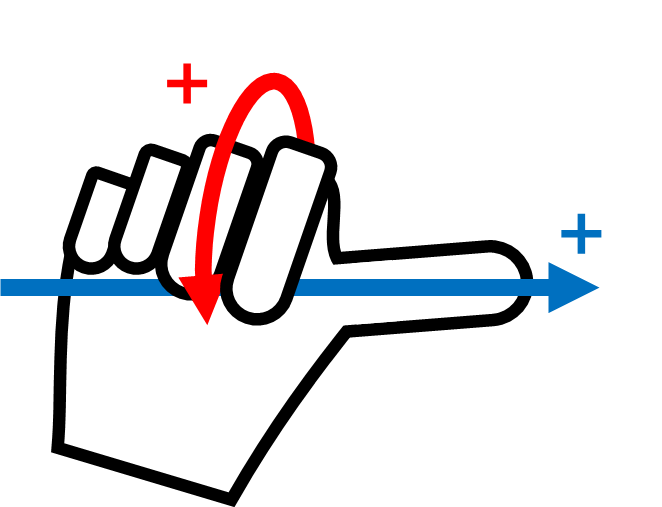
A, B, C의 회전 방향은 오른손의 엄지 손가락이 해당 축의 ‘+' 방향을 향하도록 놓고 주먹을 쥐었을 때 나머지 4개의 손가락이 가리키는 방향이 '+’ 회전 방향입니다. 이를 오른 나사의 법칙이라고 합니다.