
Task Editor Move Command 기본 개념 알아보기
MENDATORY EASY 5 MIN
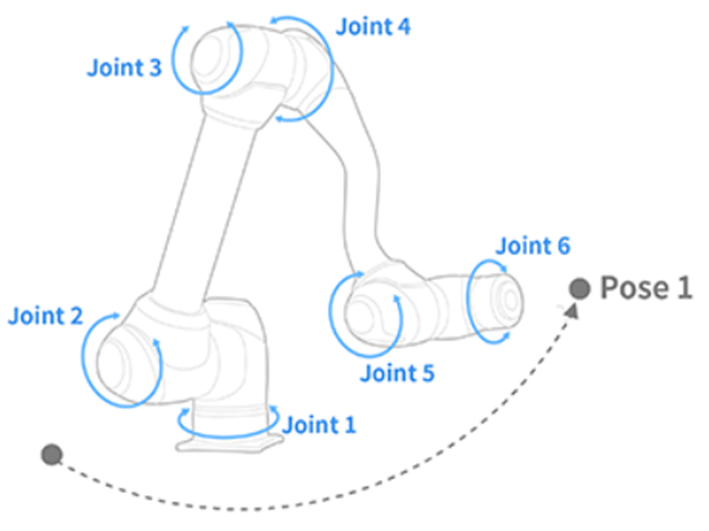
두산 로봇은 총 9 종류의 모션을 제공하고 있습니다. 기본 모션인 MoveJ , MoveL 및 이 두 가지 모션에서 파생되는 7가지의 모션으로 로봇의 움직임을 제어하게 됩니다.
로봇 모션의 종류
| Motion | Feature | |
|---|---|---|
| 1 | MoveJ | 로봇의 각 관절이 현재 각도에서 목표 각도로 동시에 이동 후 동시에 멈춤
|
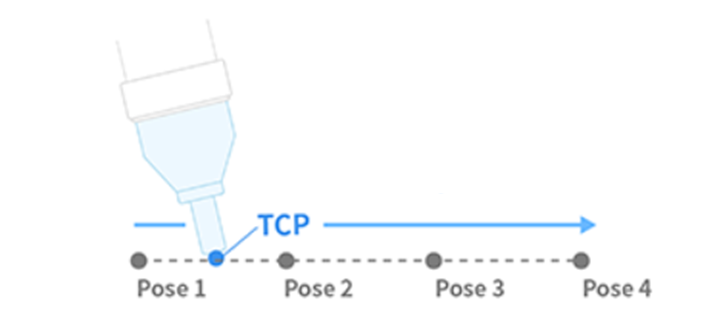
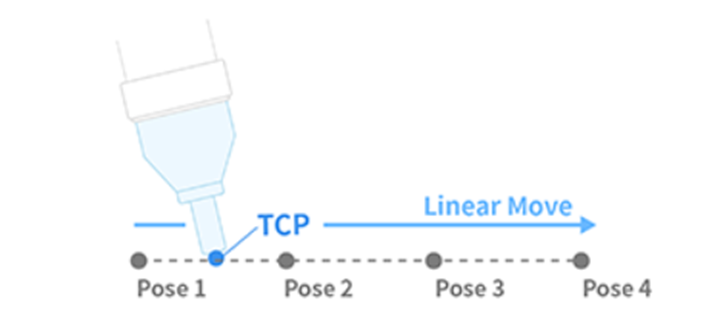
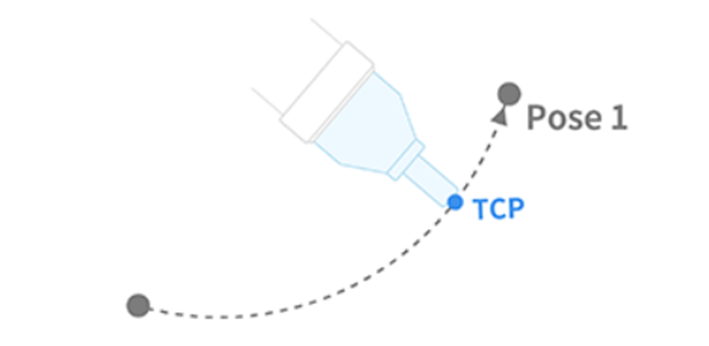
| 2 | MoveL | 로봇 TCP를 직선을 유지하며 목표점까지 이동
|
| 3 | MoveSJ | 로봇이 설정한 모든 각도를 경유하며 이동
|
| 4 | MoveSX | 로봇 TCP가 모든 점을 경유하며 이동
|
| 5 | MoveJX | 로봇 TCP가 목표점으로 이동할 때 로봇 자세를 임의로 지정하여 이동
|
| 6 | MoveC | 로봇 TCP가 원호를 유지하며 목표점까지 이동
|
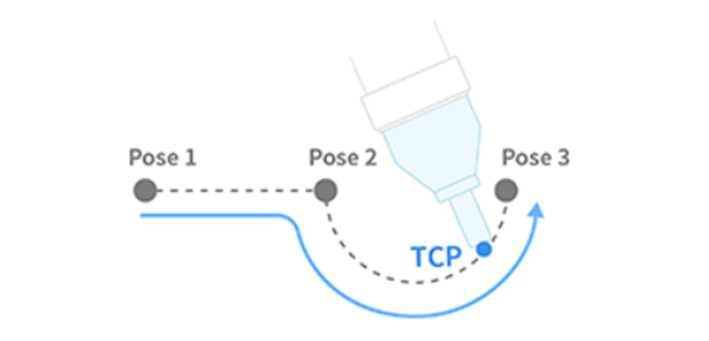
| 7 | MoveB | 직선 및 원호로 연속적으로 이루어진 구간을 최종 목표점까지 등속 이동
|
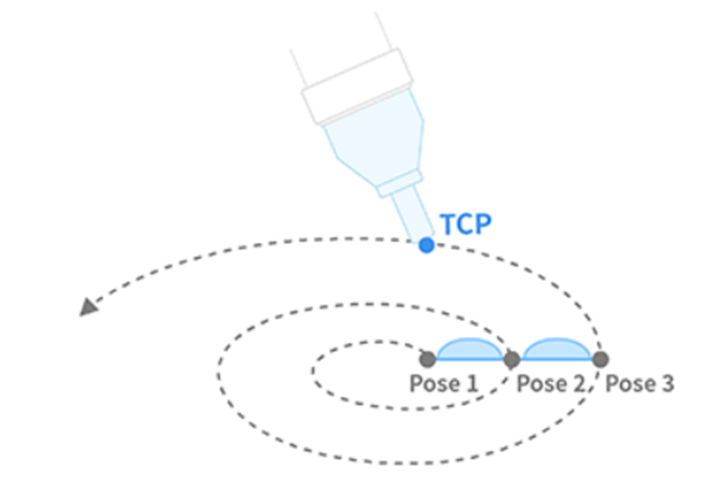
| 8 | MoveSpiral | 나선의 중심에서 시작해 최대 반경까지 이동
|
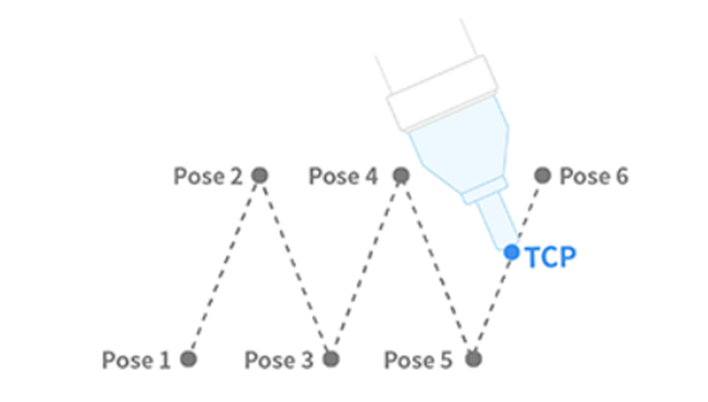
| 9 | MovePeriodic | 일정한 진폭과 주기로 왕복 이동
|
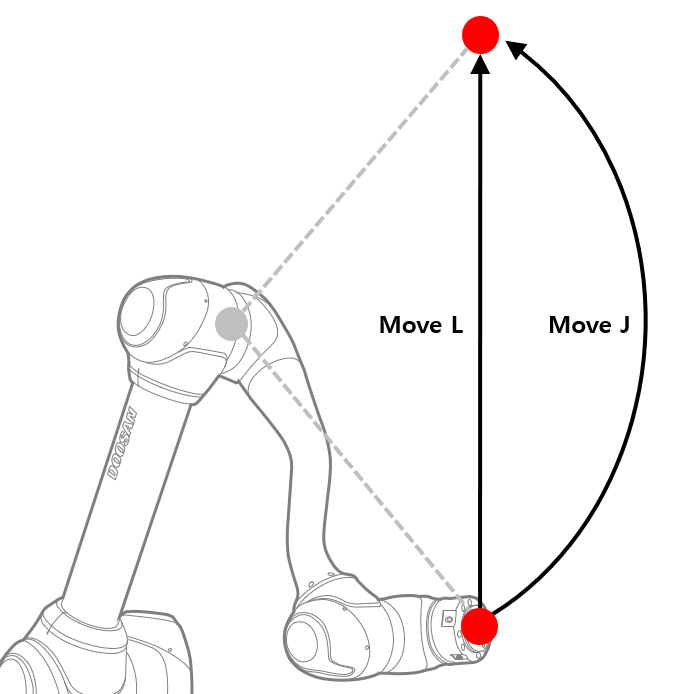
MoveJ&MoveL
로봇 모션을 사용하기 전에 기본 모션인 MoveJ와 MoveL를 이해하는 것은 매우 중요합니다.
- MoveJ에서 J는 관절(Joint)의 약자입니다. 이 모션은 각 관절이 목표 각도로 동시에 이동 후 동시에 정지 합니다.
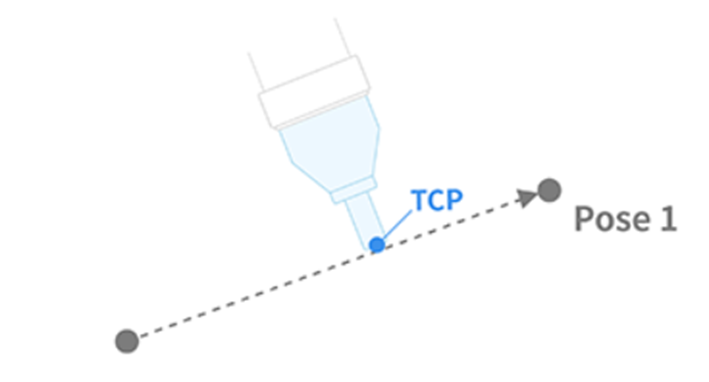
- MoveL에서 L은 선형(Linear)의 약자입니다. 이 모션은 로봇 끝단의 TCP가 목표 자세(위치 및 회전 각도)로 선형으로 이동합니다.
| Type | MoveJ | MoveL | |
|---|---|---|---|
| 1 | 이동 방식 |
|
|
| 2 | 장점 |
|
|
| 3 | 단점 |
|
|
| 4 | 활용 |
|
|